
ビデオがここに表示されない場合、 直接リンク 。
機能:
1)4本の脚2)ラジコン3)軽量4)最適価格5)鈍的arduinyなし。
詳細:1)6本の脚を持つロボットは定義上安定しているため、面白くありません。 管理が難しい4本足オプションを選択しました。 長所:安く、バッテリーの植え付けが少なく、切断する部品が少なく、足の動きが速い。 2)bluetoothによって制御され、制御線と電源線はありません。 5バイトの制御メッセージのみがラップトップから無線で送信されます。 サーボ制御の軌道、角度、およびインパルスの計算全体は、ボード上のコントローラーで行われます。 3)重量を減らすために、すべての細部はPCBで作られ、穴と窓が簡単に作られました。 余分なラックやブラケットはありません。 1.1Ahの小型軽量バッテリーは40分間持続します。 リチウムポリマー、当然。 4)サーブ:TowerPro MG90車は最も安くはありませんが、中国が提供するものの中で最もお粗末ではありません。 彼らはイベイでそれを注文し、台湾の同志がステッカーを貼り直すことでより弱いMG90S車を送ったと疑われました。 50%のケースでプラスチックギアの付いた青いSG90が鳴り、グリッチが発生するため、お勧めしません。 コントローラー:ストーンはハードウェアでFloatPoint演算をサポートする必要があります; AtMegaが整数で12個のサーボをカウントすることはできません。 価格/品質については、STM32F3Discoveryボードを選択しました。 馬鹿からの彼女の良い保護に喜んで驚いた。 5)ほとんどの退屈なプログラマーは、「アルドゥイン」と呼ばれる特定の{検閲済み}から旅を始めます。 arduinoロボットはやや物足りないことが判明します。 私たちはすべてをシャフ語で書きました。 石は、MS VSの上部であるKEILで書かれました。
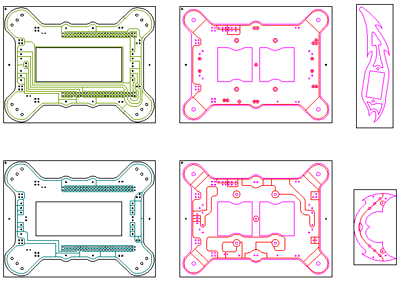
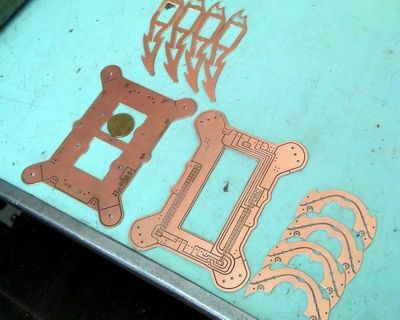
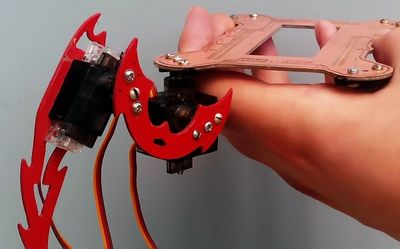
設計 中国の同志の機械には、片側にのみシャフト出力があります。 ルートマシンが片側だけで固定されている場合、曲げた瞬間に自重が流れ出し、すぐに巻き付きます。そのため、混乱して、シャフトに合わせて10 mmのスチールピンを裏側に貼り付けることにしました。 ルートマシンは2つの通常のPCBボード間で修正されました。 底部には、ピンの下にベアリングがはんだ付けされています。 上の階にはディスカバリーボードがあり(コネクタに取り付けられ、はんだ付けされていない)、下の階にはバッテリーと2つの電源安定装置があります。 床は長いピン(オフィスクリップなどの非常に強く軽い)ではんだ付けすることで固定され、それに沿ってピタロヴォが天板に移動します。 シャーシの寸法は、ディスカバリーのサイズに基づいて選択されました。 膝の長さは、 Arimanから提供されたサーバーの正直なデータに基づいて、4 cmに選ばれました。 7 cmのすねの長さは、1センチのオーダーの地上高を提供します。 足が長くなると、車は対処できなくなります。 詳細(フラットのみ、複雑なものはなし)がフリースで描かれ、3Dモデルがそこで組み立てられます。 PCBフォイルでは、電源と信号の配線経路が切断されました。 可能なことはすべて、ジクロロエタンで接着することでした。 最終的な総重量は367グラムです。 詳細は、京セラ製フライスカッターを備えたGF-38マシンでカットしました。 私たちはアリマンに同意します-あなたは直接製粉プロセスを観察しなければなりません、金のためにあなたの叔父に部品を注文することはできません-彼らはでたらめを作るでしょう 機械がなければ、それも機能していましたが、エレガントではなく、長い間機能していました。





ソフトウェア部分。 STM32F3Discoveryには十分なマルチチャンネルユニバーサルタイマーがあり、パーセントをロードせずに12y(またはそれ以上)のマシンを制御できます。 この石には、わずか13クロックサイクルで平方根を計算するためのハードウェア関数があります(彼は感謝しています)。 math.hのアークサイン関数は地獄のように抑制的であることが判明したため、テイラー級数に展開を書き込む必要がありました。 残りは学校の三角法を使用しました。 コサイン定理。 計算は毎秒50回行われます。 マシンに制御を与えるための公称期間は20msです。 PLLを使用すると、パーセントが最大パフォーマンスになります。 サーボは、PWMを試す前に、シングルパルスモードを介してタイマーによって制御されていました。 DHの低い位置と脚の迅速な昇降により、2本の脚を同時に持ち上げてもロボットは落下しません。 ステップの長さと方向の再計算により、速度の変更、リバース、外出先でのターン、およびスポットでのターンが実現されます。 前脚による段階的な反発と後部の同方向の動きにより、後脚に立ちます。 BluetoothモジュールはUARTに接続され、すべてのパッケージに同期バイトとCRCが含まれています。 パケットハンドラーは、TX割り込みによって呼び出され、コマンドをメインループに送信します。




車。 機械を制御するには、常にパルスを印加する必要があります。そうしないと、機械はオフになり、位置を保持しません。 パルス幅が変わらない場合でも、継続的に適用する必要があります。 このモードでは、機械はバネのように動作します-手で回すほど、抵抗力が強くなります。 オフにしてもまったく抵抗しません(ただし、これは指を前後にひねっても役に立たないという意味ではありません-ギアボックスが巻き取られています)。 アリマンの実験を繰り返し、タイプライターでビール缶を育てました。結果は彼のようです-中国が宣言した2000グラムの代わりに約700グラムを上げました。 レッグアセンブリは750グラムの力に耐えることができます(たぶんそれ以上で、試していません-テキソライトの膝が曲がり始め、マシンが燃え尽きる可能性があります)が、レッグは400グラム以下の力で比較的適切に動作します(はい、力は通常ニュートン単位あなた自身)。 合計で、ロボットは750 * 4 = 3kgを制限で保持できます。これは、デザインがうなり声を出さない場合です。 キャリーインモーションは400 * 2(2本の脚が宙に浮いているため)= 800グラムからその質量の367を引いた合計433グラムです。 積み込むほど、より多くの車が熱くなります。 合計1.5アンペアを食べます。 アドバイス:新しい機械で最初にすることは、生産の糞便を分解し、責任を持ってきれいにすることです。 同志SunMuiVchayは個々のコピーの特性の同一性を保証しないため、シャーシを組み立てた後、すべてのマシンを較正する必要があります。 0と90度の2点で較正しました。 そのようなプログラム、制御、テスト校正は次のとおりです。

詳細と価格
詳細と価格(2014年春、伊兵衛、Dialextream、Promelectronicsの価格):
12サーボMG90 + 2 ... 3スペア+実験用の安いブルー-12h185r
STM32F3Discoveryボードまたは同等品、最も重要なのはFPUと優れた周辺機器-507
バッテリー1100 mAh-329r
5ボルトの2つのスタビライザー-2x101r
Bluetoothモジュール-217r
USB-UARTアダプター(デバッグ用)-112
バルーン内の車の塗装(色は、判明したとおり、運転性能に影響しません)-130摩擦
2枚のPCB 20x30cm-2x150r
コネクタ、スイッチ-100r
12サーボMG90 + 2 ... 3スペア+実験用の安いブルー-12h185r
STM32F3Discoveryボードまたは同等品、最も重要なのはFPUと優れた周辺機器-507
バッテリー1100 mAh-329r
5ボルトの2つのスタビライザー-2x101r
Bluetoothモジュール-217r
USB-UARTアダプター(デバッグ用)-112
バルーン内の車の塗装(色は、判明したとおり、運転性能に影響しません)-130摩擦
2枚のPCB 20x30cm-2x150r
コネクタ、スイッチ-100r
さらに。 私たちは主に、イヴァンとミカ(ズラトウストの都市)の参加で、ノルム(ミアスの都市)と一緒にやった。 夕方、4か月間、ゆっくりと行いました。 それを受け取らない方が良い-十分な熱意と実装のためのさまざまなアイデアがありません。 知って必要なソフトウェア:AutoCADまたはSolid Age(図面、3Dモデル)、Artkam(CNCマシンのコード)、Matkad(静的計算)、MS VS 2008またはMatlab(モデルの実行)、MS VSまたはBorlyak(トッププログラム) 、CaleまたはYar(下位プログラム)、まあ、Excelと電卓。
更新07/12/14
今日、彼らは電話からコントロールをテストしました。 アンドロイドにはほとんど経験がないため、シンプルで曲がっていますが、動作します。 ジョイスティックを購入したので、おそらくこのトピックは作成しません。引き続き管理します。
ここに短いアンドロイドのビデオがあります:
ビデオがここに表示されない場合、 直接リンク 。
実装のいくつかのニュアンス
ネットワーク上で日食をするためにbluetoothを使用する例は十分にあります。 ロシア語で既製/賢明なを含む。
接続する最も簡単な方法は、IDによるものです(手の届く範囲にあるデバイスの検索に時間を浪費せず、別のデバイスに接続するリスクもありません)。 モジュールID(ID = "20:13:11:01:11:28"のHC-06モジュールがあります)は、電話のBluetoothメニューから事前に知っておく必要があります。 次に、UUID = "00001101-0000-1000-8000-00805F9B34FB"でデバイスに接続する必要があります。 これはシリアルポートUUIDです。 設定する必要はありません。 9600ボーを搭載。
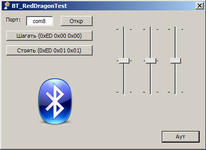
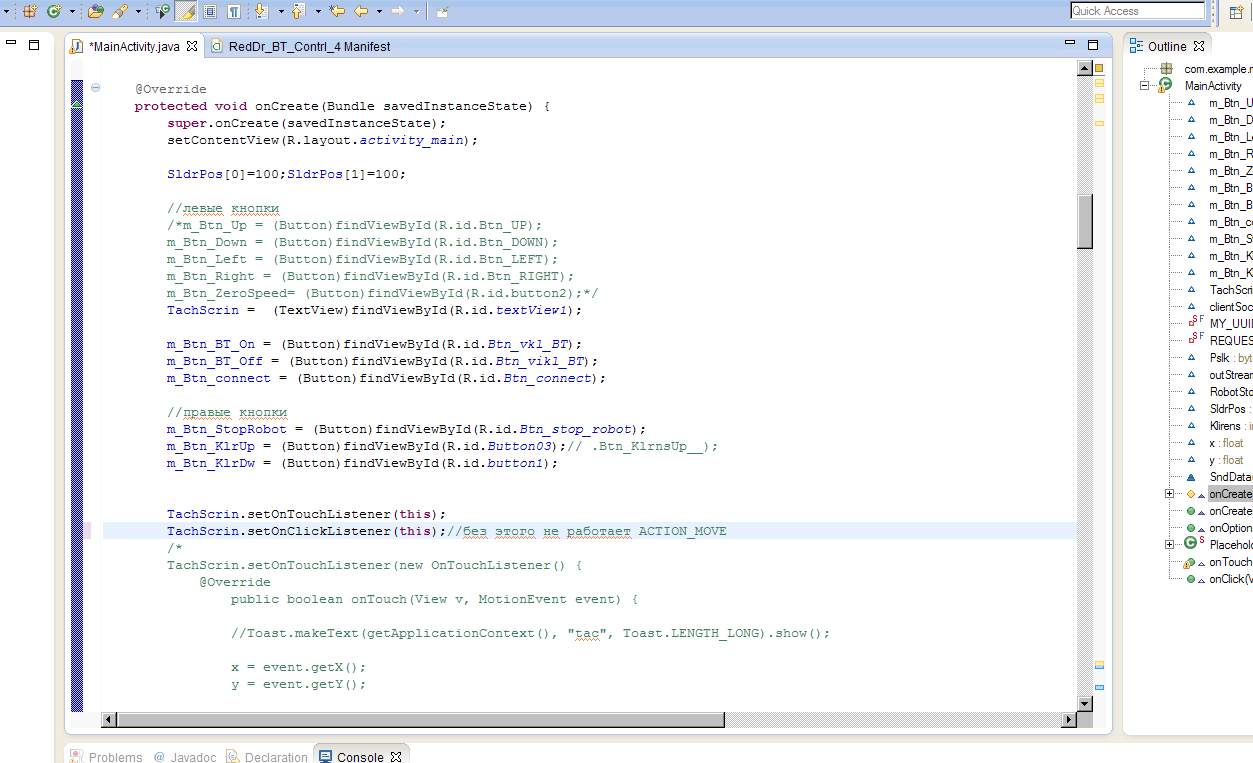
最初はボタンで制御が行われていましたが、ロボットの速度はスムーズに調整されていたため、タッチスクリーンに切り替えることにしました。 シングルフィンガーモードのTextView1要素は、レイアウトでタッチスクリーンとして機能し、デバッグ番号も表示します。 特異性があります。setOnTouchListenerで動作しますが、setOnClickListenerを宣言しない場合、最初のタッチにのみ反応しますが、移動やリリースには応答しません。
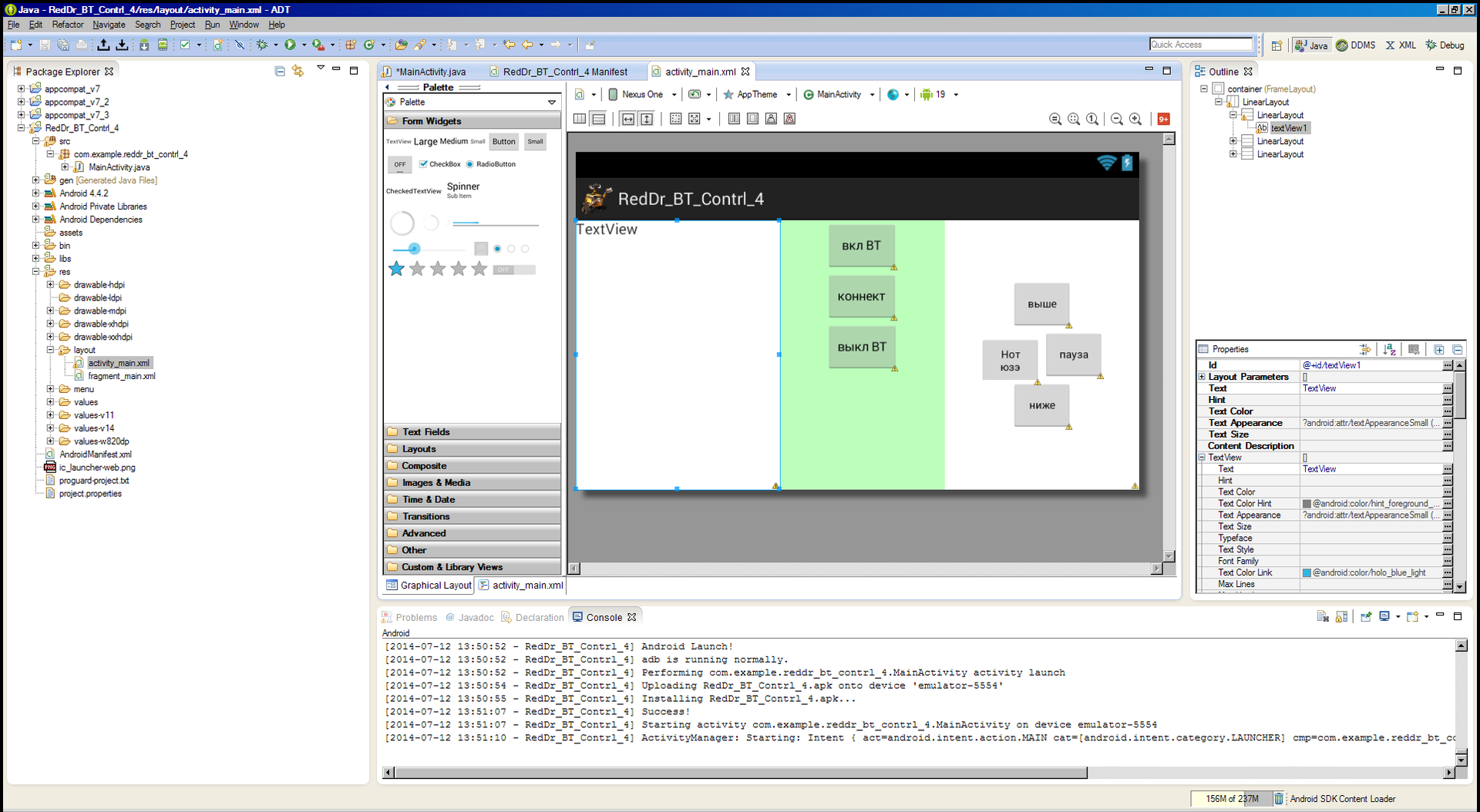
これは、コストラクタとエミュレータでどのように見えるかです:

判明したように、タッチスクリーンは通知を頻繁に生成するため、シリアルポートバッファを詰まらせます。 睡眠中に人為的な減速を導入する必要がありました(100)。 ボタンは発生しませんでした。
Eclipseを開始する前に、残りのプログラムを保存/閉じることをお勧めします。 Minecraftと同時にはまったく起動しません。 Win7では、日食はひどくバグがありました。 WinXPに切り替えました。 エミュレータ(ブレーキ)ではなく、電話で直接デバッグすることをお勧めします-彼の設定に「USBデバッグ」チェックボックスを入れます。
接続する最も簡単な方法は、IDによるものです(手の届く範囲にあるデバイスの検索に時間を浪費せず、別のデバイスに接続するリスクもありません)。 モジュールID(ID = "20:13:11:01:11:28"のHC-06モジュールがあります)は、電話のBluetoothメニューから事前に知っておく必要があります。 次に、UUID = "00001101-0000-1000-8000-00805F9B34FB"でデバイスに接続する必要があります。 これはシリアルポートUUIDです。 設定する必要はありません。 9600ボーを搭載。
最初はボタンで制御が行われていましたが、ロボットの速度はスムーズに調整されていたため、タッチスクリーンに切り替えることにしました。 シングルフィンガーモードのTextView1要素は、レイアウトでタッチスクリーンとして機能し、デバッグ番号も表示します。 特異性があります。setOnTouchListenerで動作しますが、setOnClickListenerを宣言しない場合、最初のタッチにのみ反応しますが、移動やリリースには応答しません。
これは、コストラクタとエミュレータでどのように見えるかです:
判明したように、タッチスクリーンは通知を頻繁に生成するため、シリアルポートバッファを詰まらせます。 睡眠中に人為的な減速を導入する必要がありました(100)。 ボタンは発生しませんでした。
Eclipseを開始する前に、残りのプログラムを保存/閉じることをお勧めします。 Minecraftと同時にはまったく起動しません。 Win7では、日食はひどくバグがありました。 WinXPに切り替えました。 エミュレータ(ブレーキ)ではなく、電話で直接デバッグすることをお勧めします-彼の設定に「USBデバッグ」チェックボックスを入れます。
受け取ったkamentyのKamenty:
はじめに Tovarischi habro-robot Buildersは、一部の場所の記事はock笑的な性格を持っているという事実にもかかわらず(気分で)、それでもその執筆の目的は非常に深刻です-私たちの作成の例の「膝の上」のロボット構築のニュアンスと落とし穴を強調します。 また、目的のベクトルを与え、サーボの機能を実証します。 したがって、コメンタで書くのではなく、メリットについて話すことをお勧めします(ただし、「このようなカバーが必要」などのカメンタも歓迎します)。 そしてもちろん、個々の個人は、少なくともI_7、少なくともZ80、バラライカを備えた電卓でも、小規模機械化の構築を提唱できます。 国は自由で、多くの人々と意見があります。
既存の
他のkamentyでkamentyが失われないように、ここに投稿します。 だから:
発見の代わりに、ストラップの付いたチップだけを置く方が良いです。 はい、そうです。 ちなみに、緑色のはんだマスクを備えた会社のボードは非常にクールに見えます。 このオプションは将来検討されました。 それまでの間、プロトタイプ(以降OEと呼びます)では、トップボードに別のボードがあることがわかりました-これは間違っています。 しかし、時間を節約するために、このオプションに行きました。 チップのPCBレイアウト、精度クラス3のPCBの注文、回路/配線での避けられないエラー、基板の再注文-長くて退屈で、まあ、それはもっと費用がかかります。
しかし、私は自宅でテキソライトを粉砕しません。 はい、そうです。 家でのこぎりは絶対に不可能です。 ワークショップでは換気を行いました。 まあ、もちろん、彼らはそれなしではなく、ガラスのほこりでスロンを吸いました。 一度きりの仕事は致命的ではないようです。 もちろん、あなたは人工呼吸器と防護マスクで作業する必要があり、カッターの下で鼻を突かないでください。 しかし、繰り返しますが、これはO.Eです。 -会社で未検証のボードを注文することは容認できない贅沢です。 ちなみに、底板はソナー用に編集しなければなりませんでした。 さまざまな種類の横枠のために、粉砕プロセスを約20回中断して中断する必要がありました。
ジャンプとランディングの実装は興味深いでしょう。 はい、彼らは階段を登るという点でも考えました。 私たちは車を殺すことを恐れていますが。 ここでの問題は、着陸の衝撃がエンジンではなく、ギアボックスにかかることです(より正確には、反対方向-これが乗数です)。 打撃がエンジンに部分的に当たるようにするには、機械が足を上げる動作を瞬時に開始してから、正しい減速で床に触れる必要があります。 しかし、待ち伏せがあります-サーボを制御するタクトは、この目的のために壊滅的に大きくなります(20ms)。 つまり ギアボックスは、感覚が伝わる前に曲がります。 2つの方法があります-1)各ジョイントを跳ね上げて、スプリングに鋭い打撃を与え、次にスプリングをゆっくりと圧縮します。2)位置だけでなく、速度とトルクも設定できる高価な車を置きます。 それはすべて偏見かもしれませんが、これらのサーボはジャンプに耐えますが、今のところ怖いです。
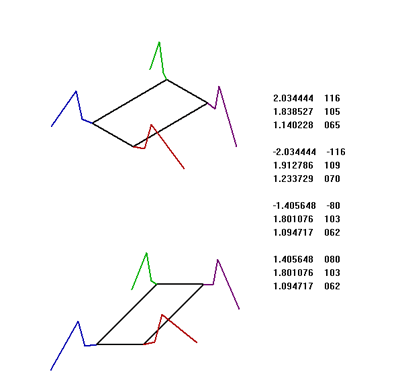
数学的な余談
ここに数学的なオタクがあり、最小化されています
脚は3つのリンクで構成され、4つの節点が判明します。 一般的な場合の直接的な問題(車の角度を知っている-最初の点に対する4番目の点の座標を見つける必要がある)を解決するには、点から点へのXYZ基底の3倍置換が必要であり、これは要素がcosおよびsinである3x3行列の乗算です。 これは直接的なタスクです。 そして、BACK問題を解決する必要があります(座標はわかっていますが、角度を計算する必要があります)。 一般的なケースでこの問題を解決する方法は、まだわかりません。 私たちが思いついた唯一のオプションは、与えられたエラーで与えられた座標に角度を合わせるという直接的な問題に対する複数の解決策です。 しかし。 問題は、学校の三角法で十分ないくつかの平坦な問題に分解することで解決されたことが保存されました。 必要なベース変更は1つだけでした(それは3Dではなく2Dです)。 ベクトル画像全体を三角形に分割し、アークサイン、アークサイン、アークタンジェントの角度を計算しました。 これらの関数は相互に計算されるため(T. Pythagorasを使用して、つまり平方根の計算を使用)、アークサインのみを使用することにしました。 テイラー/マクラウリンシリーズでの拡張は、ペディビックスで提供されているものの中で最も単純です。 ただし、最小二乗計算で単純な区分線形または区分放物線近似を使用できます。 (最終的にはテイラー級数と同じ式になります。)この計算方法(具体的には、トリッキーな最適化と固定小数点演算を備えたGoertzelのようなハッカーアルゴリズムの使用を伴わないこの方法)は、atmegaをストレッチしません(最初はそれを使用したかった)ルートまたはサインの最初の除算または計算で立ち往生し、それらは数十個あり、12台のマシンがあり、サイクルは1/50秒です。 それでもatmegaを使用する場合は、PCで角度を計算し、ブルートゥース経由でロボットに仕上げ値を送信する必要があります(24バイトが取得されます)、またはあらゆる機会の動きのすべての段階を事前に計算し、ステップするテーブルに入力します。
ソースコード
コードを修正し、改善し、自分のコードとして販売する人(または非人間)が存在するため、公開する予定はありません。 応答も挨拶もありません。 彼らはまたカルマをen望から罰します。 すでに合格し、もはや望んでいません。 また、ロボットを違法な目的に使用できることは反発です。 したがって、NO。
目標、計画
主な目標は一般に達成されます:ロボットは歩き、ほとんど踊ります。 とりあえず、倒れる前にタイムアウトを設定して、脳が休むようにします。 そこにはミニカメラが来るだけで、設定します。
おやすみなさい、そして幸運...