
グーグルでは、簡単に購入できることがわかりました。 しかし、価格は痛烈でした。 たとえば、最も安いVixin Ploarie Star Trackerの費用は400ドル+送料です。 はい、その収容力は疑わしいものでした。 将来的には、広角レンズから70-200 / 2.8に切り替える予定で、カメラと合わせて1.5 kg未満の重さです。
検索の過程で、人々は自分自身をいわゆるBarn Doorトラッカーにすることが判明しました。1、2、 その他 。 簡単に言えば、ドアは納屋からです。 操作の原理は簡単です-ドアキャノピーで接続された2つのボード。 そのうちの1つは、地球と同じ速度で軸を中心に回転します。 キャノピーの軸は北の星に向かっています。 底板は三脚の上に置かれ、カメラ付きの三脚ヘッドは可動ハーフの上に置かれます。
カットの下にたくさんの写真。
私はそのようなトラッカーを自分で作るというアイデアを得ました。 これがないと、このようなスタートラックしか撮影できません。

推定によると、これにはほとんどすべてが手元にありました。 私はこのトラッカーを基礎とすることにしました。 そこには、説明の中で、主要なパラメーターを計算する方法があります。
10mm MDF材料が材料として選択されました ワークショップでの彼のレーザー切断の経験でした。 素材は安くて快適です。 信頼性の面では、言うのは時期尚早です。 試運転を見てみましょう。
まず、CADプログラムで、実行する必要があるモデルを作成しました。 これを行うには、スタッドの半径と回転速度を計算する必要がありました。 私の推定によると、M5スタッドの半径は、ピッチが0.8 mm、ナットの回転速度が1 rpmの場合、182.85 mmでした。 ヘアピンは、強度と糸ピッチの妥協案としてM5によって選択されました。

なぜなら その後、70-200 / 2.8で撮影したかったため、1ピクセル内でブラーが発生しないように、エンジンが1分間に必要なステップ数を計算する必要がありました。 すべての見積もりの後、構造の製造におけるエラーが状況を劇的に悪化させないように、10倍のマージンを作りました。
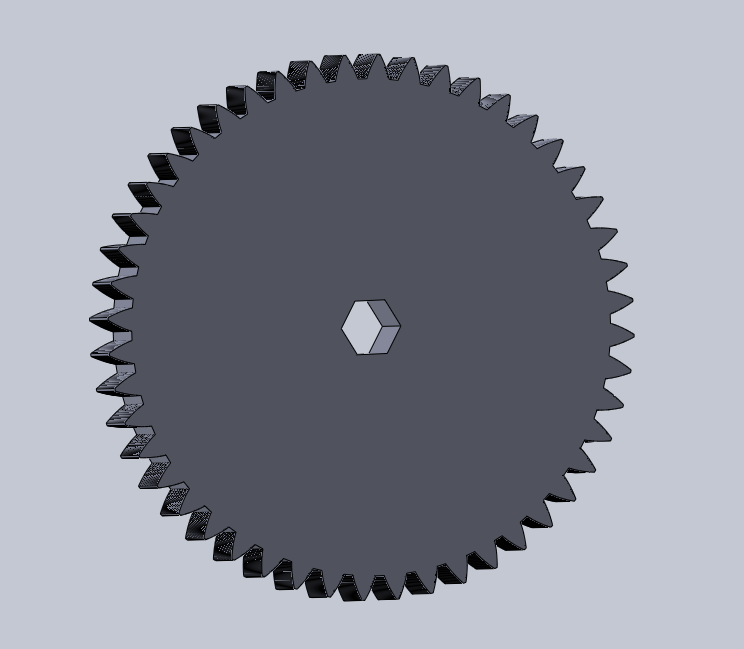
元のデザインのスタッドのナットを回転させるには、ギアを使用しました。 しかし、十分なお金の歯車を見つけることはうまくいきませんでした。 e-bayのみで、それでも月額10ドル以上で配送されました。 したがって、私はまた、MDFまたはアクリルからのレーザーで歯車を切ることにしました。

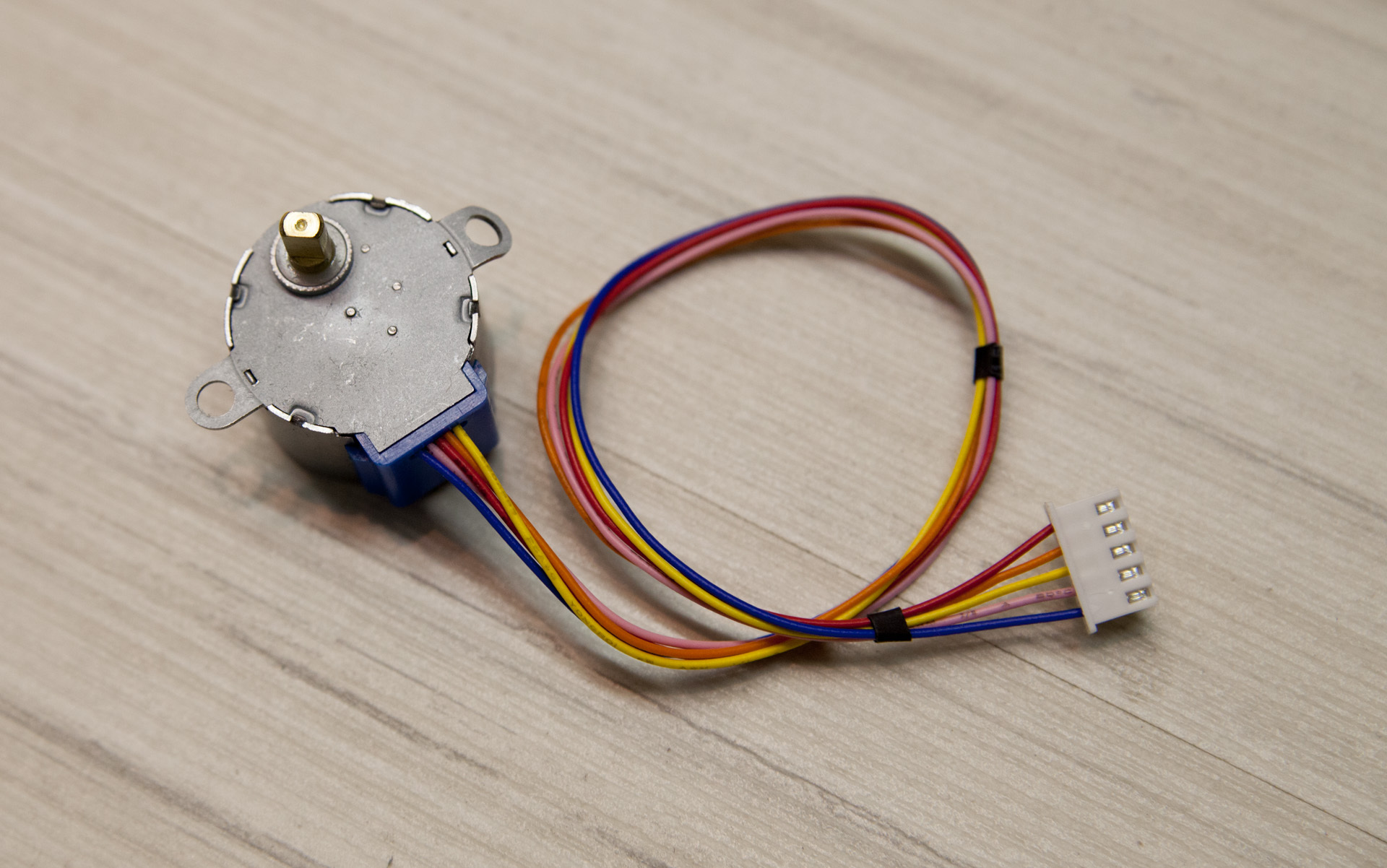
エンジンは中国の28BYJ-48ステッパーを使用していました。 長い間、私はそれらのいくつかのピースを持っていた、私はすべてをプレイしたかった。 彼らは、配達でebayの上で2ドル未満のコントローラーボードで費用がかかります。 5〜12ボルトで駆動します。 64ステップでシャフトを1回転させます。 また、63.68395に近い係数のギアボックスがあります.1。 したがって、外部軸は4ステップモードで2037ステップ、8ステップモードで4075ステップで回転します。 トルクは大きくありませんが、このタスクには十分すぎるほどです。 インターネット上で彼は、彼から約15 rpmを得ることが可能であると書いていますが、電力は12 Vに増加しています。 私は4 rpmで十分だと判断し、エンジンを4回転させるとスタッドのナットが1回転するように4:1の比率でギアを作りました。

店では、バックラッシュを最小限に抑えたドアキャノピーを購入しました。 そのサイズとボードの幅になりました。 そこでヘアピンを買いました。 別の店で私は固定材料をダイヤルしました。 ファスナー付きMDFの場合、ループは約100 UAHかかりました。 ($ 8.3)。 私はeBayで小さなボールヘッドを注文しましたが、これまでのところ、古い三脚から通常のボールヘッドをセットしました。
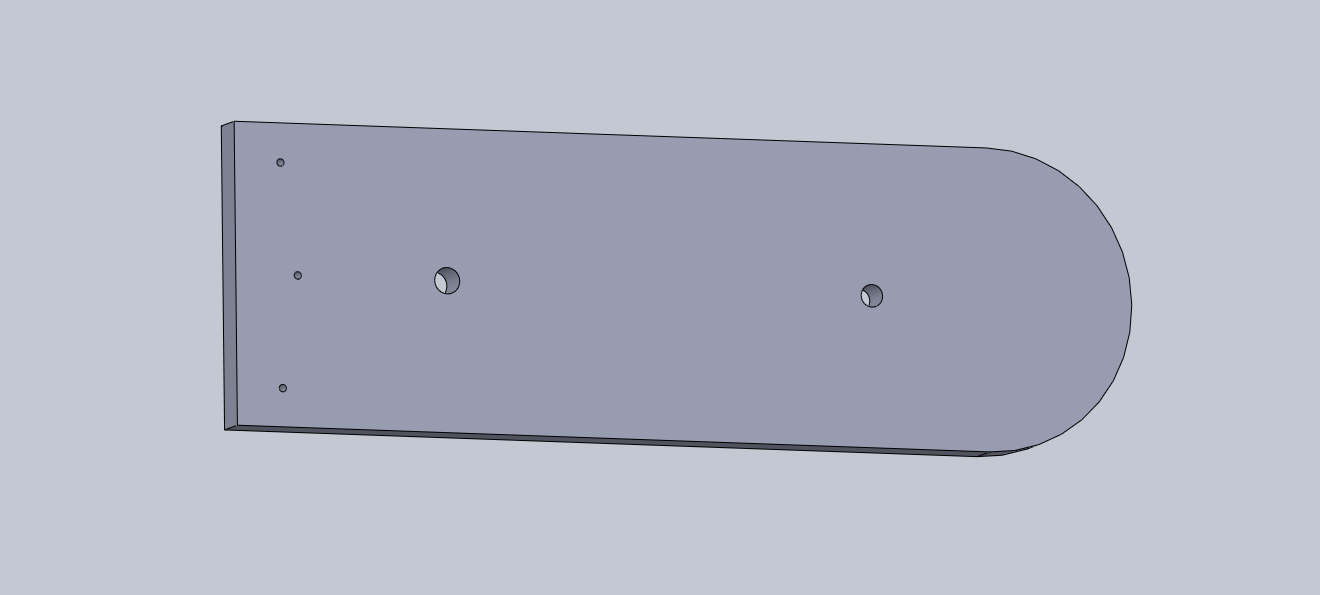
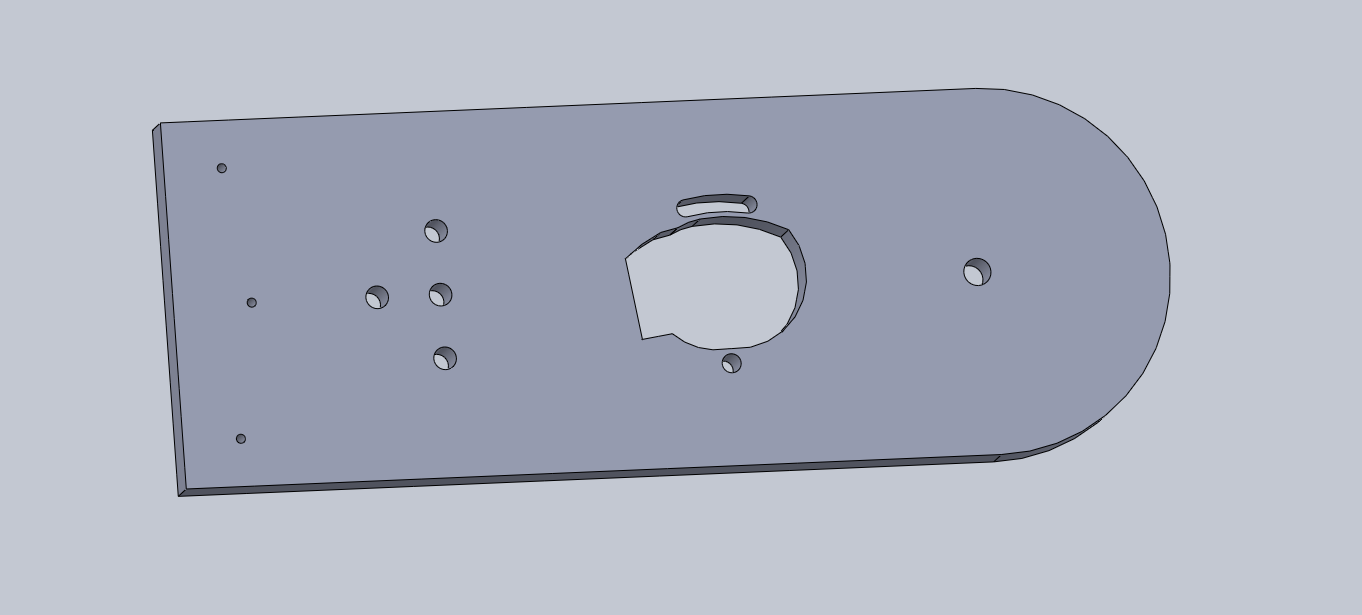
下半分に、私が持っていた短いマンフロット804RC2フォトヘッドの取り外し可能なプラットフォームに取り付けるための穴を開けました。 エンジン用の穴も開けました。 取り付け穴の1つを中心にエンジンを回転させて、ギア間の距離を調整することを想定しました。
絵に満足したとき、私はそれを挿し木に運び、ここにそのような素晴らしいが強く匂いのする灰の部分を持ってきました。
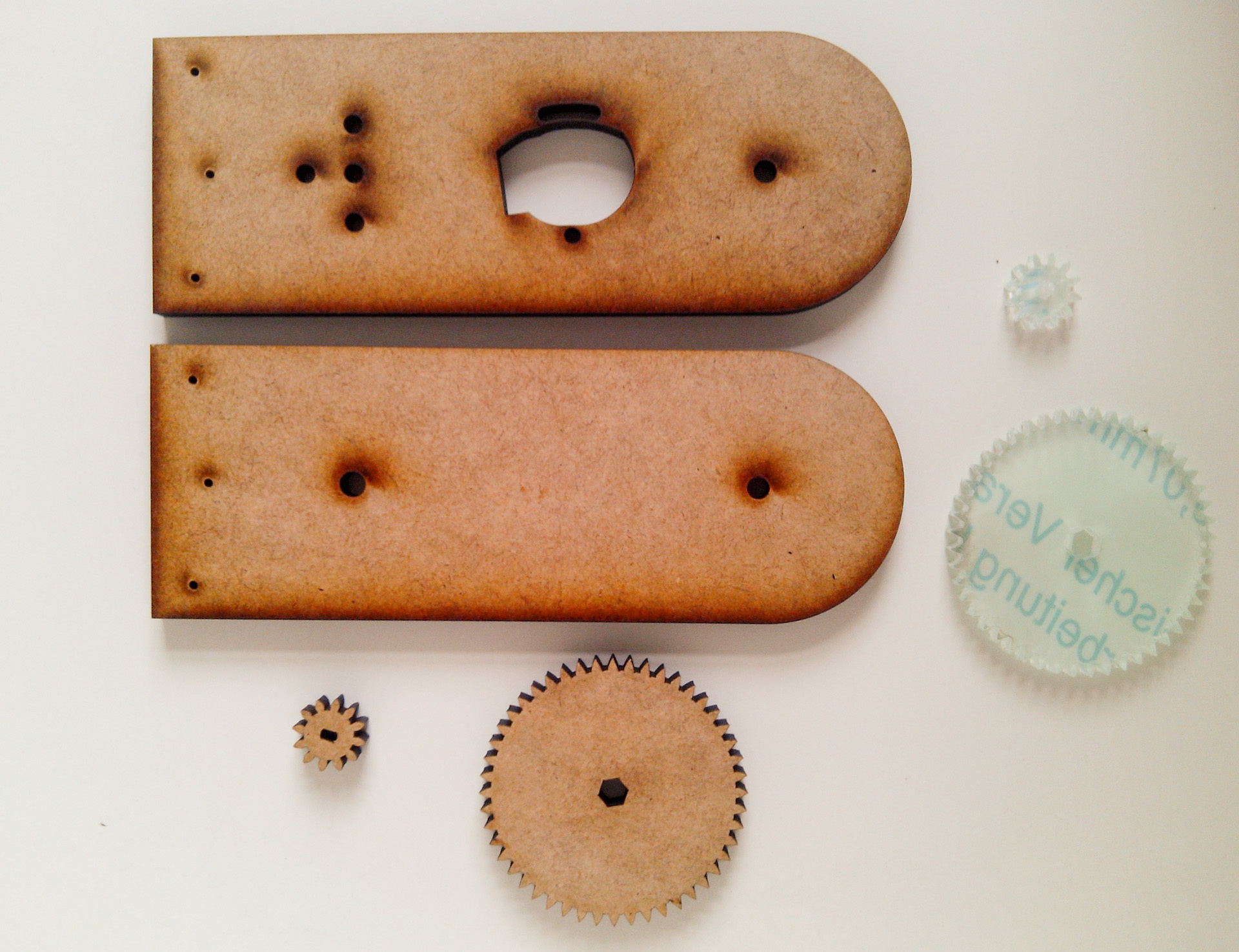
ギアはアクリルとMDFの両方からカットされました。 アクリルでは、ひどく判明し、歯の端が溶けました。 ファイルで処理する必要がありました。 主観的に、MDFはより柔らかいことが判明しました。 しかし、戦闘状態を見てみましょう。

ギアをナットに固定するのは非常に簡単です-最小公差の六角形の穴。 アクリル-8mm。 2個のM5ナットを取り付けるだけです。

参照の精度を高くするには、スタッドを円弧で曲げる必要があります。 これは次のように行われます:希望する直径の2つの同心円をプリンターで印刷し、その端がスタッドのサイズになるようにします。 そしてゆっくりと曲げて、常にテンプレートに適用し、チェックします。 ヘアピン全体を一度に曲げることをお勧めします(長さは1メートルです)-これは簡単です。 ショート-手で優しく曲げないでください。 10分ですべてが準備できました。
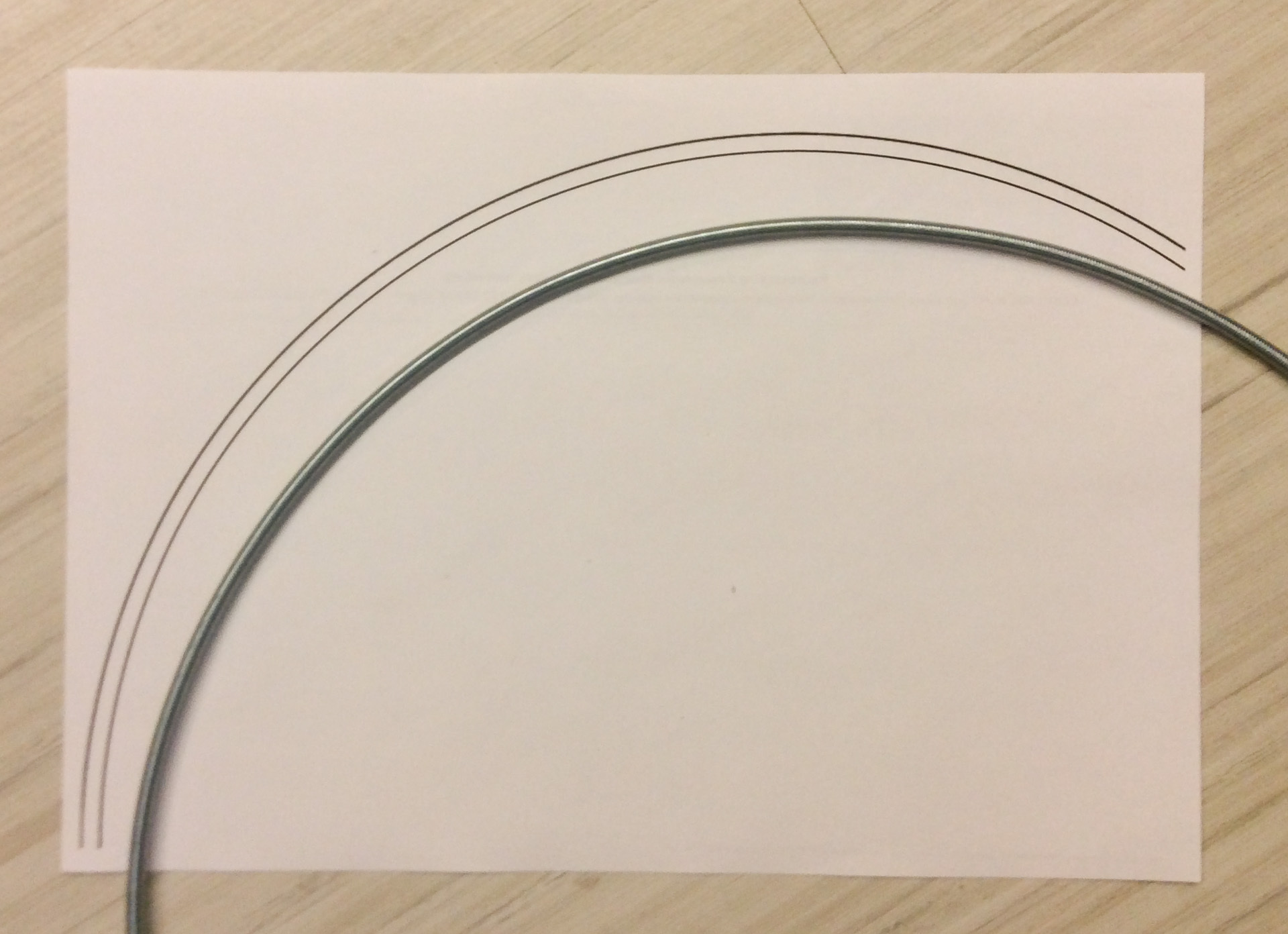

ドレメルで余分な部分をカットします。 私は25センチメートルのオーダーのセグメントを残しました。 これは5時間以上の参照に十分です。
すべてをまとめる:

以前に書かれたarduinoのスケッチの回転を確認します。
#include <AccelStepper.h> #include <LiquidCrystal.h> #define HALFSTEP 8 LiquidCrystal lcd(8, 13, 9, 4, 5, 6, 7); int adc_key_val[5] ={50, 200, 400, 600, 800 }; // Motor pin definitions #define motorPin1 3 // IN1 on the ULN2003 driver 1 #define motorPin2 4 // IN2 on the ULN2003 driver 1 #define motorPin3 5 // IN3 on the ULN2003 driver 1 #define motorPin4 6 // IN4 on the ULN2003 driver 1 int NUM_KEYS = 5; int adc_key_in; int key=-1; int isRun; double speeds = 271.6; int maxspeed = 1245; AccelStepper stepper1(HALFSTEP, motorPin1, motorPin3, motorPin2, motorPin4); void setup() { lcd.clear(); lcd.begin(16, 2); lcd.setCursor(0,0); lcd.print(" Stopped "); lcd.setCursor(0,1); lcd.print("Speed "); lcd.print(speeds); lcd.print(" "); isRun = 0; stepper1.setMaxSpeed(maxspeed); stepper1.setSpeed(speeds); } void loop() { adc_key_in = analogRead(0); // read the value from the sensor key = get_key(adc_key_in); // convert into key press if (key >= 0) // if keypress is detected { if (key == 1) { speeds += 0.1; delay(50); } if (key == 2 && speeds > 0) { speeds -= 0.1; delay(50); } if (key == 0) { speeds += 10; } if (key == 3) { speeds -= 10; } if (speeds>maxspeed) { speeds = maxspeed; } if (speeds<-maxspeed) { speeds = -maxspeed; } if (key == 4) { isRun = 1 - isRun; lcd.setCursor(0,0); if (isRun == 1) { lcd.print("+++ Running +++ "); } else { lcd.print(" Stopped "); } delay(250); } lcd.setCursor(0, 1); lcd.print("Speed "); lcd.print(speeds); lcd.print(" "); stepper1.setSpeed(speeds); delay(50); } if (isRun == 1) { stepper1.runSpeed(); } } int get_key(unsigned int input) { int k; for (k = 0; k < NUM_KEYS; k++) { if (input < adc_key_val[k]) return k; } if (k >= NUM_KEYS) k = -1; // No valid key pressed return k; }
LCDキーパッドシールドを使用して、回転速度を選択しやすくしました。
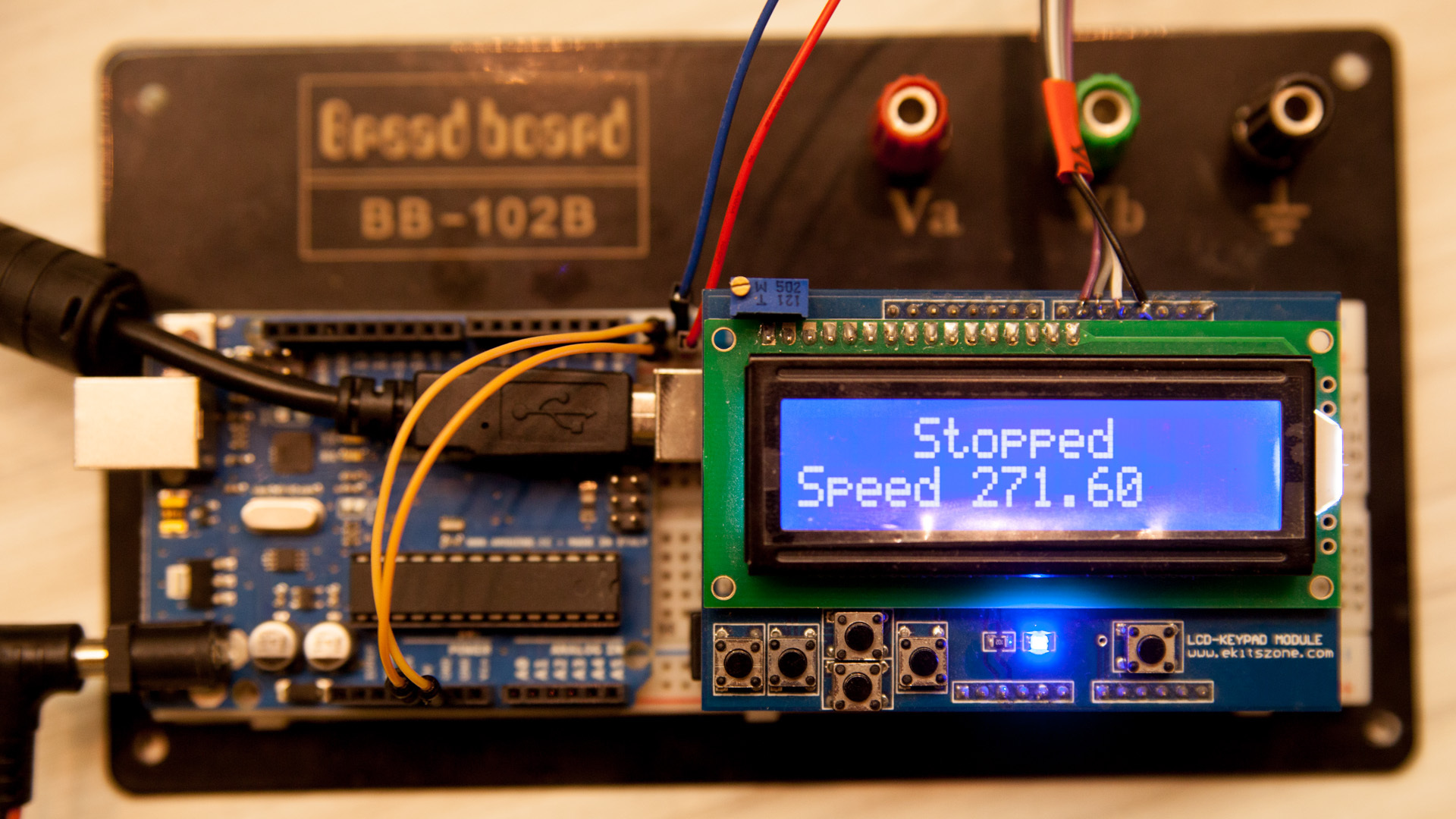
開始/停止ボタンがあります。 25ステップと0.1ステップの増分/減分があります。 速度は1秒あたりのステップ数で測定されます。 推定速度は271.6ステップ/秒である必要があります。 しかし、私はまだ確認できません。 いつも雨が降っています。
結果のデザインの一般的なビュー
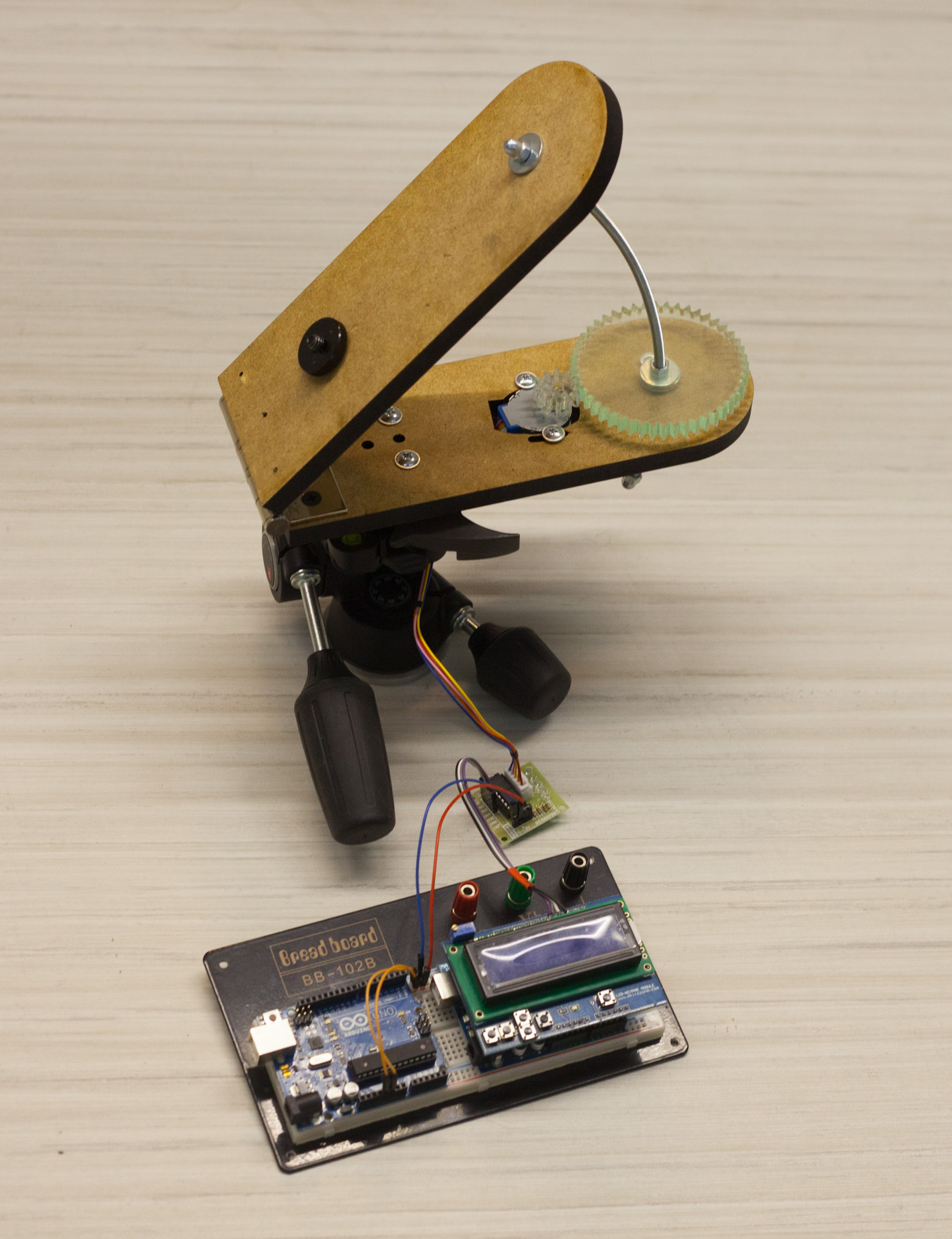
2つのアルデュインがあります。 注意しないでください。 1つはエンジンの動力源として使用されます。
ワークプロセスビデオ
今、天気は嫌です。 雨。 星が見えるようになり次第、フィールドでマウントをテストします。