
制動中の電気モーターは電気を生成できることが知られています。 このようなブレーキは、電気自動車、路面電車、トロリーバス、電車、電車、遠心分離機、巻き上げ輸送装置(クレーン、ホイスト、エレベーター)などで広く使用されていますが、機械式ブレーキモードで生成される電気の量は比較的少ないです。
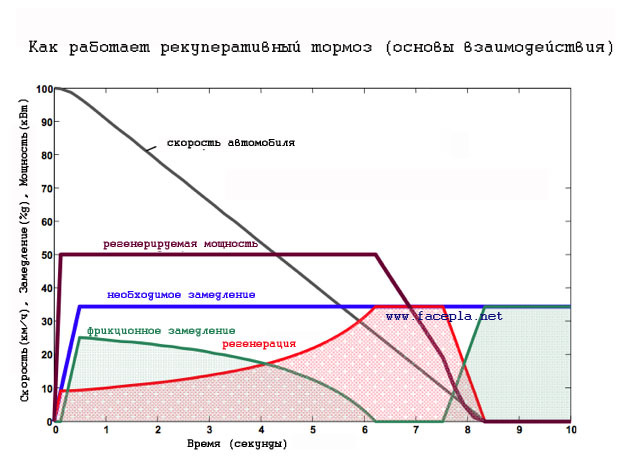
ハイブリッドの機械的(摩擦)ブレーキとともに受信される回復エネルギーのモードの1つを特徴付ける図。 ここからグラフを取得します 。
モーターの固定子は、ブレーキをかける機会を与えた場合、たとえば、ベアリングに入れた場合、ブレーキ中に回転する可能性があることに注意してください。 アイデアは、そのような回転ステータのエネルギーを使用するようになりました。 ここでは、機械的ブレーキにより停止したローターがステーターとして機能し、回転するステーターがローターとして機能します。 このプロセスの条件付き画像をビデオに示します。最初に条件付きローターが回転し、シャフトに負荷がかかり、次に条件付きステーターが回転します。
当然、シャフトで適切なモーメントを実現するには、そのステーターが静的でなければなりません。 機械的制動を伴う固定子の回転速度は、シャフトで達成されるモーメント、固定子自体の慣性モーメント、および固定子の回転が依存する摩擦モーメントに依存します。 つまり 固定子の回転を記述する式は次のようになります。

 -ステーターの角(回転)加速度
-ステーターの角(回転)加速度
 -制動前の角(回転)軸加速度
-制動前の角(回転)軸加速度
 -ステータの慣性モーメント
-ステータの慣性モーメント
 -シャフトの慣性モーメント
-シャフトの慣性モーメント
 -ステータの回転に作用する摩擦モーメント
-ステータの回転に作用する摩擦モーメント
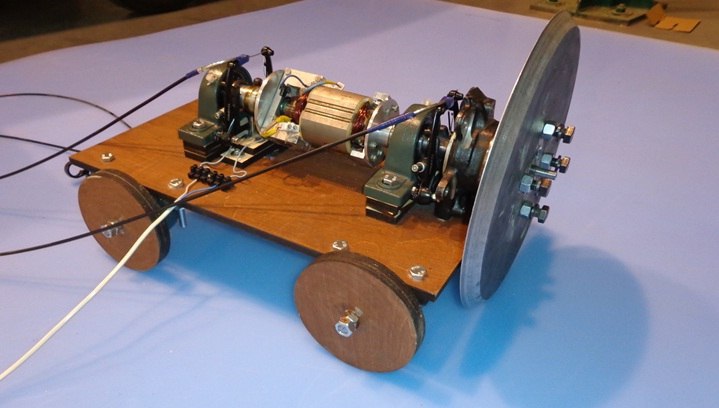
実験をさらに詳しく説明しましょう。 実験的なセットアップが行われました:

それは、電気モーター、ブレーキ、測定器が取り付けられたポータブルプラットフォームで構成されていました。 電力が250 Wの永久磁石励磁の電気モーターの場合、PCB製のアダプターが挿入され、スチールピンがねじ込まれ、ピンがハウジングベアリングに挿入され、アダプターはモーターシャフトを制動するときにステーターがベアリング内で回転できるようにしました。挿入されたストップの助けを借りて、固定子を静止したままにします。
直径300 mm、厚さ10 mmのアルミニウム製ディスクを電動モーターのシャフトに取り付け、ディスクに手動の機械式ブレーキを取り付けました。
機械的制動中に、回復エネルギーはPCS 250 2チャンネルUSBオシロスコープに供給され、オシロスコープはこのエネルギーの値をコンピューターに与えました。
エネルギーを測定するために、オシロスコープの2番目のチャネルの設置から、抵抗が1オーム、電力が20および100 Wで、互いに並列に接続されたいくつかの抵抗が接続され、回路の電流を計算するのに役立ちました。
シャフトの機械的制動中のエネルギー回収エネルギーの記録は、非回転ステーターと回転ステーターの2つのモードで実行されました。 これらの2つのモードでは、実験データが記録されたディスク回転周波数の同じ最大間隔が選択されました;この間隔は500〜600 rpmの範囲でした。 合計で、各モードで12回の測定が行われました。
その結果、処理のために各モードで8つの測定が行われました。 そのため、ブレーキをかける前の最大シャフト速度の算術平均値は、2つのモードでほぼ同じでした。
(各モードごとに)標準偏差を計算することにより、得られた回収エネルギーの結果は除去され、信頼区間内に収まりませんでした。
回転ステータの場合、算術平均は558.5(rpm)、静的ステータの場合は559.1(rpm)でした。
静的ステーター2.04 Jの場合、回転ステーターの機械的ブレーキ中に得られた回復エネルギーの算術平均値は5.3 Jでした。

2つのモードで受けたテストの数とエネルギーの数
機械的制動中に生成された回復エネルギーの極性の性質に注意を払う価値があります;新しいモーターでは、電圧が極性を反対に変更しました:
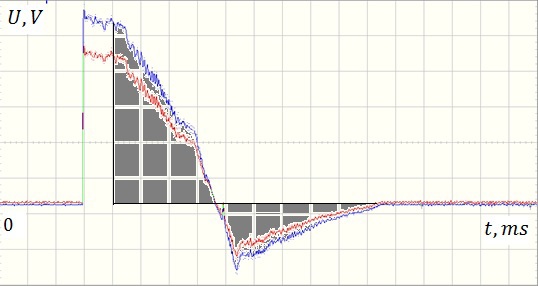
また、固定子を使用した設計では、電圧の極性は変わりませんでした。

機械的ブレーキの網掛け部分を図に示します。 t(時間)の波形上の1つのセルは200 ms、U(電圧)の場合は0.2 Vです。
逆極性エネルギーを使用するには、これらの目的に極性スイッチを使用できます。
また、機械式ブレーキのないモードで回転ステーターを使用した場合の回復は短くなるため、機械式ブレーキをかける前のステーター回転の「オン」時間はできるだけ短くする必要がありますが、ローターからの回転エネルギーがステーターに渡されるように十分であることも注目に値します。 オシログラムから判断すると、約100 msの時間で十分であり、この期間に大きな損失は見られません。おそらく、機械的ブレーキまでの時間をさらに短縮することが可能です。 非機械的制動時の損失を減らすために、回転ステーターの上に2番目の静的ステーターを作成するというアイデアがありましたが、これは電気モーターの設計を複雑にします。
この開発に先立って、シャフトの機械的制動中に固定子も回転を行う、連続励起電気モーターを備えた設計がありました。

結論:回転固定子を使用してシャフトを機械的に制動するエンジンの実験設計では、静的固定子を使用した場合の2.5倍の回復エネルギーが得られます。 ここでのエネルギー回生量は、制動前のシャフトの回転モーメントよりも大きく、回転するステータの摩擦モーメントが小さいほど、ステータの回転に許容される慣性モーメントが小さくなり、シャフトの回転モーメントが小さくなり、回転するステータの摩擦モーメントが大きくなる、などです。回復のエネルギーは少なくなります。 得られた効果にもかかわらず、そのような効果のある電気モーターを使用できるデバイスの構造変化の回収と信頼性について尋ねるべきです。
プロジェクト管理:Julian Baryshnikov(設計、組立、実験、部品製造、記事執筆、アイデア)-iulianbaryshnikov@yandex.ru
プロジェクトへの支援:Vitaliy Azarov(設計、組み立て、実験)、Anton Alyoshkin(設計、組み立て、部品の製造)、M.V。 Yakovitskaya(編集)、Alexander Troitsky(実験の実施)、Nikolai Eremin(測定装置のソフトウェア)、Alena Chumak(設計)、 Fablab Polytech St. Petersburg (部品の製造、測定器、実験)。