欲しかったもの
イノベーションとハイテクMIPTの学部で、このタイプのクールなコース-革新的なワークショップを開催しています。 要するに、3年生の学生から、できれば何らかの形でプログラミングや最新のテクノロジーと適切に結びついた、何か現実的なことをしようとしているチームが募集されます。 これが私たちが達成したかったものです。 私たちのプロジェクトは、自動モードで離陸/着陸し、GPSポイントに沿って飛行し、内蔵カメラで見るものすべてを撮影できる飛行機を作成することです(そう、現在流行のクアドロコプターです!)。 FPVも必要でしたが、後で。
発言
投稿は科学的でも技術的でもない可能性が高いですが、多くの失敗がありましたが、ある種の成功もあったクールなストーリーのカテゴリからです。 それで、笑って、私たちがしたことを知りたいと思う誰もが、私はHabr-Katを求めます。

私たちは誰ですか
私たちのチームは3年生5人で構成され、動物園のようでした。
2つのプラス、本当のios開発者、数学者、そして私たちを一緒に保ち、私たちに何かをさせることを強いられる少女。
さらに、ABBYYの3人の男性が私たちと協力しました。なぜなら、私たちのプロジェクトはこの会社からのものだったからです。
最初にこれをすべてやりたかった方法
計画はシンプルでした-趣味で最も単純なRTF(飛行準備完了)航空機を購入し、そこからラジオを引き出し、そこにarduinoを挿入したか、壊れたスマートフォンからワークステーションのボードを取り付け、そこにファームウェアを配置しました(ワークステーション-ROS-ロボット操作の場合)システム、Arduinka-ardupilot、megapirat、multi-wii、またはこれらすべてのフォークからの何か)。 その後、必要なものを入手し、コースを静かに閉じてから、全体の改善を続けます。カメラジンバルを固定し、このジンバルを管理し、さらにチップを考え出して追加します。 何から来たの? ええと...まあ、少なくとも何か。
コンポーネントの購入
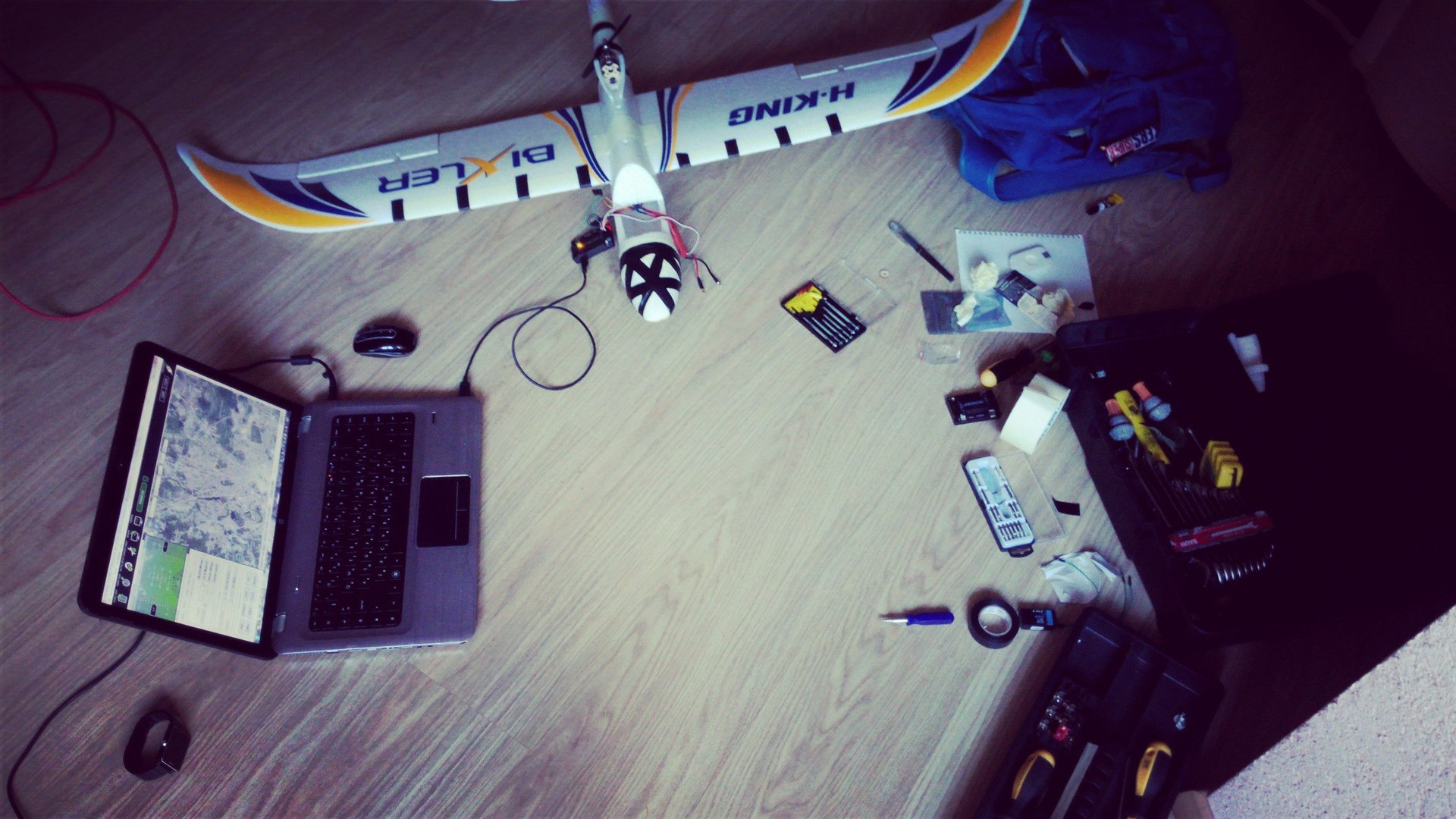
最初に、非常に人気のある2番目のBixlerの2つのコピーを注文しました-hobbyking.com/hobbyking/store/__32541__Hobbyking_Bixler_2_EPO_1500_KIT_.html 、
これらの脳が選ばれました-www.hobbyking.com/hobbyking/store/__26588__MultiWii_PRO_Flight_Controller_w_MTK_GPS_Module.html
これらすべてを注文した後、私たちは勇敢なロシアのポストを待ち始めました。
それから私はすぐにHCに関するレビューを残します-中国人は3日間購入しただけでなく、追跡番号も与えず、うまくいきませんでした。 その結果、3月中旬に小包を注文し、5月9日の戦勝記念日に受け取りました...学期はすでに終わりました。
4月末に、私たちは引きずって神話上の前提を待つことは不可能であることに気付き、何かをしなければなりませんでした。
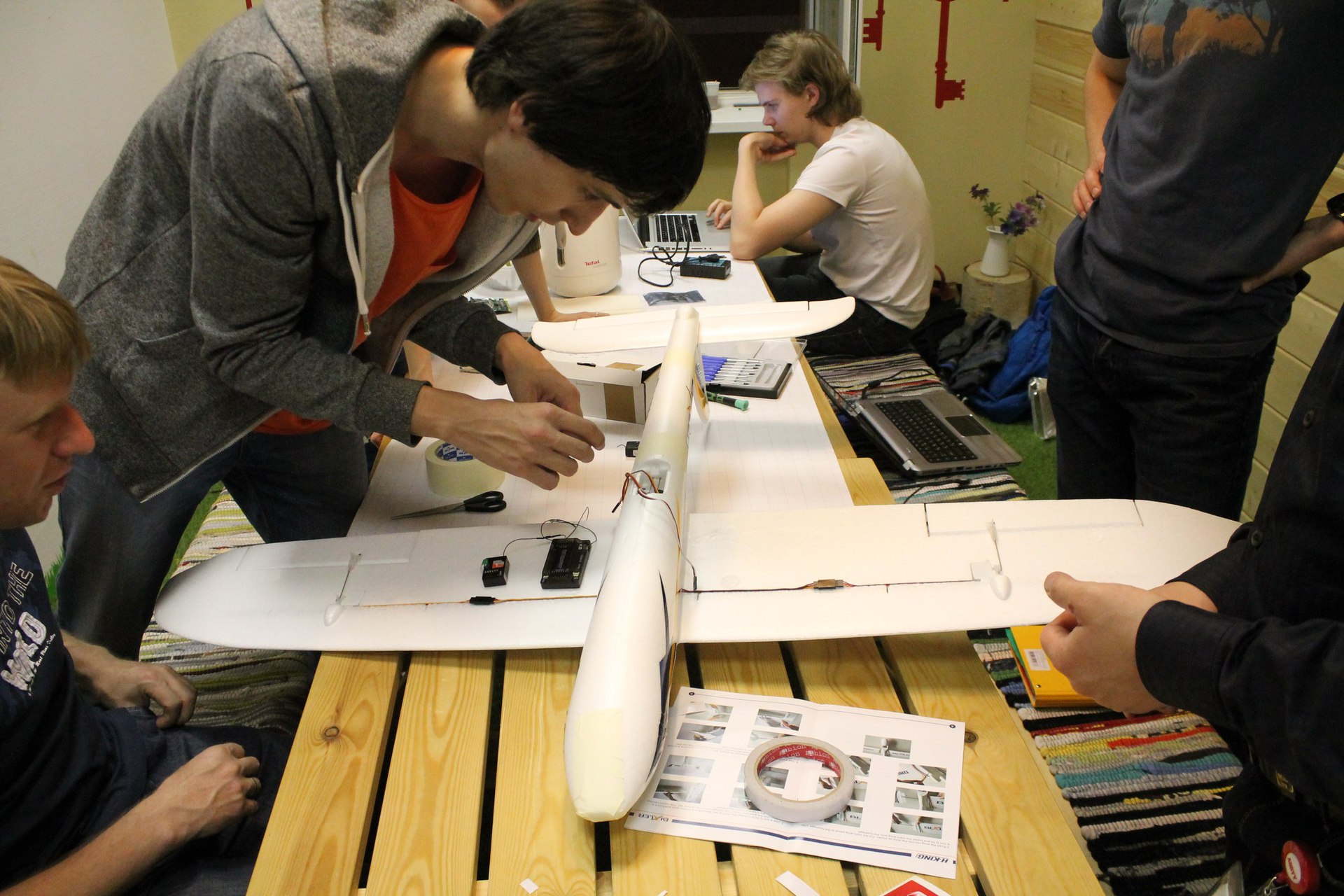
ロシアでは、最強の航空機(最初のフライトで)が購入されました。これにより、ボードと将来的にカメラが引きずられる可能性があります。
こちらが飛行機の写真です。

ソフトウェア
長い論争と賢明な何かを集めようと試みた後、Ardupilotに落ち着きました。箱から出してたくさんのクールなことを行うことができることに加えて、便利なボードから直接ミッションを置くことができる非常にクールなこともあります-APM Mission Plannerグアヤ(ユーザーが望んでいると思います)+タブレット/携帯電話を使用してミッションを設定する機能もあります。ミッションを設定するにはUSB OTGサポート、飛行機のステータスを追跡して外出先で目標を変更するためのテレメトリキットのみが必要です。
最初のビルド
この同じ赤い飛行機を収集した後、私たちは非常に長い間頑固にPIDを調整しました。これはあまり人気がなく、職人の生産のように見え、通常の既製の構成が見つからなかったためです。 ファームウェアには合計で321個のパラメーターが必要です。これらのパラメーターは、ファームウェアがハードウェアを制御する方法を決定します。 良いことは何もありませんでした;自動モードで離陸することができませんでした。
新しい飛行機
それから5月9日、ラッキーだった-飛行機が到着した。 真実は完全に分解された状態で来たので、私たちは完全な組み立てに夜を過ごしました。


初飛行
飛行機を集めて、私たちは飛びに行きました。 もちろん、最初は何も起こりませんでした-飛行機は自動的にミッションに行きたくなく、手からスタートした後にエンジンをオンにしませんでした。 その後、構成と設定を調べました-電源がオンになると、ボードはデフォルトで誤った動作モードになりました-PCへの接続を待っており、ミッションを開始しようとしていませんでした。
その後は、私たちのフライトで最もおかしくて悲しい瞬間でした。 夕方遅く、次の打ち上げ後、飛行機が飛んだ。 横風が吹き、彼は安定しようとしました...そして転がりました...補助翼を担当するサーボの極性を逆にしました...しかし、飛行はそこで終わりませんでした-約20メートル後に飛行機は着陸腹に達し、はい、着陸し始めました。 エレベータの極性を混乱させなかったことを考えると、飛行機は垂直に上向きに移動し、木の枝をつかみました。
その日の写真レポート-



ご覧のように、航空機の機首と翼を電気テープと取り付けテープで強化しました-それには正当な理由があります。 すべての事故とcrash落の後、飛行機は安定して飛行し、次の打ち上げに備えて約5〜10分かかりました。
しかし、フライトの最初の日は何も終わりませんでした-暗くなったが、飛ぶことを学んだことはありませんでした。
フライトの2日目は、何も役に立たなかった-約2時間飛行しようとして、飛行機は高いバーチにぶら下がっており、勇敢な地元の射手であるTolkienistsがそこから離陸した。 修理は一晩かかりました。
成功
私たちのプロジェクトのプレゼンテーションの前に、たった2.5時間しか残っていませんでした。午前6時でした。そして、飛行しようとしました。
最初のフライトはほとんど最後になりました。

私たちはすでに、この写真がプロジェクトのプレゼンテーションの唯一のスライドになると考えていました。
起動中にJPIが出発したことが判明しました。これは、ボードのジャンパーであり、航空機のESCまたはUSBからボードに電力を供給する場所を決定します。
障害ビデオ:
しかし、私たちはそれを修正し、部分的ではありますが成功しました。
ご覧のように、手から始めた後、自動モードがオンになり、飛行機が離陸し(コントロールがボードに渡されたため)、潜り込んでからコース上に横たわり、着陸ゾーンに到達し、多少柔らかく座っていました。 残念ながら、オペレーターは幸運ではなく、私たちはそれを曲がりくねって撃ちました。 ただし、飛行機がどのように進んで安定しているのかをはっきりと確認できます。
その後、再び飛行することはできなくなりました。JPIジャンパーがノズルにとどまり、絶えず飛び出して、時間がなくなりました。
近い将来、カメラを取り付けて広いエリアを飛行する計画ですが、これは今後の投稿のトピックです。
誰かが何かに興味があるなら、彼はPM /コメント/別の投稿で答える準備ができています。
psそして、これが私たちが木になった方法です: