
Luna-9は、別の天体にソフトランディングを行う最初のデバイスです。 しかし、Luna-9が一連のソフトランディング車両の12番目であることはあまり知られていません。 事故でなければ、最初のソフトランディングは3年前の1963年に行われていました。 前の11台のデバイスはどうなりましたか。これから何を学ぶことができますか?
マテリエル
E-6プログラムの惑星間ステーションの設計と飛行計画を理解する必要がある、どのノードに障害が発生したかを明確にするため。 飛行に関しては、次の段階を区別できます。
育種 。
打ち上げロケットの最初の3つのステージは、ステーションと4番目のステージを中間の低地球軌道に持って行きます。 第1ステージと第2ステージには単一の制御システム(軍事ミサイルの遺産)があり、第3ステージと第4ステージは基地の制御システムによって制御されていました。

月への加速 。 分離の約1時間後、大西洋上で、第4ステップがオンになり、ステーションが月に分散しました。
月への飛行 。 飛行中、ステーションの軌道が測定され、補正のためのインパルスが計算されました。 飛行の途中で、ステーションは修正インパルスを与え、軌道エラーを修正し、着陸エリアを目指しました。

着陸 ご存知のように、月には大気がありません。そのため、月面にソフトランディングを行うことができるのはジェットエンジンのみです。

オリエンテーション 。 飛行経路は、最後のセクションが月の表面に垂直になるように設計されています。 ビーコンとして太陽、地球、月を使用して、ステーションは軌道軸に沿って方向付けられました。
ブレーキング 。 ブレーキエンジン(KTDU)は、電波高度計のコマンドで月面の75 km前にオンになりました。 ブレーキング中に、不要になったブロックは捨てられ(重量が少なく、ブレーキがかけやすく)、ゴム製のショックアブソーバーが膨張しました。
連絡先 メインブレーキセッションの後、KTDUはオフになり、ステーションは低速で制御エンジンを削減しました。 格納式プローブは月との接触を固定し、これを通してショックアブソーバータンク内の着陸モジュールがブレーキコンパートメントから撃たれました。
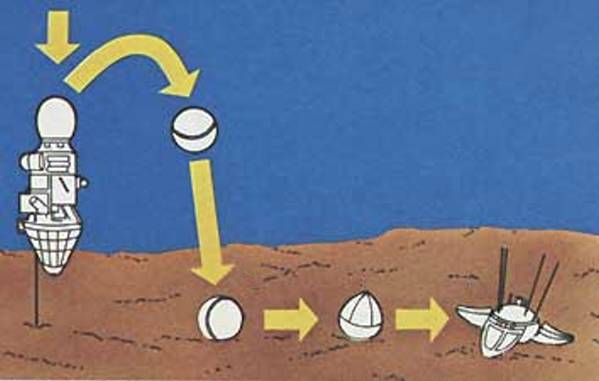
包含 。 「ボール」が月にジャンプするのを止めた後、衝撃吸収材が落とされ、着陸モジュールは上部の保護ローブ、そしてアンテナを明らかにしました。
情報の転送 。 ステーションの主な目的は、月面のパノラマを伝えることです。 したがって、主な科学的ツールは、気密透明容器内の回転チャンバーでした。
物語は、写真がありますが、ややドライです。 幸いなことに、駅の設計と飛行について語る素晴らしいソビエト映画があります。
「Moon-9」のシナリオはOrbiterにありますが、 面倒すぎて置くのが難しい人には、飛行計画をうまく説明しているビデオがあります。
クラッシュ
駅の設計と飛行計画が多かれ少なかれ明確になったので、何が、どこで、なぜ壊れたのかについて話すことができます。
初期条件
8K78ライトニングミサイルは、E-6プログラムに基づく飛行の開始前に10回発射されました。 これらのうち、1回の起動で、4つのステージすべてが正常に機能しました。 第4ステージの失敗は5回の事故で、3回目-2回目および1回目/ 2回目-2回でした。 第一に、設計者は砲兵とロケット発射装置を残しました。彼らは多くの発射を行い、緊急発射の結果に応じてデバイスをすでにデバッグしていました。 宇宙の問題を解決するために、このアプローチは不適切であることが判明しました-お金と時間の両方での1回の打ち上げの価格は、徹底的な地上試験と試験の価格を大きく上回りました。 第二に、火星と金星に惑星間ステーションを送信するという名声は、「完了-すぐに手放し、多分飛び去る」という考えに至りました。 当然、結果は「多分」が機能していないことを示しています。
また、事故の原因の分析が不十分だったことにも注意する必要があります。 実際、第4ステージの打ち上げは大西洋上、南アメリカとアフリカ沿岸の間で行われ、基地は地球の湾曲のためにソ連にテレメトリーを送信できませんでした。 したがって、5つの第4段階の障害の正確な原因は不明でした。 E-6プログラムが開始されるまでに、テレメトリを受信してMCCに送信するために、ドリンスク特殊船がギニア湾に送られ、拒否の理由がわかるようになりました。
最も単純な計算では、このような条件下で起動が成功する確率は10%(1成功/合計10)であることが示されています。 ただし、考えてみると、原因が不明である第4段階の障害のために0になる傾向があり、誤動作の検出はランダムに実行されました。
最初のスタート
1963年1月4日、E-6プログラムの最初の打ち上げ。 事故、第4段階の障害。 船「Dolinsk」はすでに配置されており、テレメトリーを取得することができました。 事故の直接的な原因は、エンジンを始動するための電気コマンドを送信できなかったことです(一部の情報源は、これらがメインエンジンの始動を保証するために使用された堆積エンジンであったことを示しています)。 この理由は、コントロールユニットの電流トランスデューサーの故障と呼ばれていました。 ブロックは乾燥窒素で満たされ、電動モーターコレクターのブラシの摩耗が増加しました。 テスト中にブロックが通常より長い時間失敗したという事実にもかかわらず、他の考えられる理由は見つかりませんでした。 解決策として、彼らは窒素を湿らせ始め、少量の酸素を加え始めました。
理由 :設計上の欠陥。
解決策 :設計変更。
セカンドスタート
1963年2月2日。 第三段階の作業現場での事故、ロケットはコースから外れ、太平洋に落ちました。 その理由は、ステーションコントロールシステムのジャイロスコープが正しく取り付けられていなかったことです。これは、ご存知のとおり、打ち上げロケットの第3ステージも制御します。 実際、最初の3番目のステップは海を目指していました。 さらに、実際の軌道がプログラムされた軌道と異なるため、ジャイロスコープの精度の欠如が明らかになりました。
理由 :操作上の失敗、設計上の欠陥も確認されています。
解決策 :起動、設計変更に備えてドキュメントと管理を変更します。
3回目の打ち上げ
1963年4月2日。 4つのステップはすべて正常に機能し、ステーションは「Luna-4」という名前で月に行きます。 事故は、補正インパルスを途中で出す段階で発生し、ステーションは月を逃しました。 事故の原因は、天体航法システムの故障です。 事故の直接的な原因は確実に確立されておらず、天体航法システムユニットは多くのコメントを受け取っています。 Chertokが説明した委員会の驚きは非常に特徴的です。 このような複雑なシステムで多数の欠陥を検出するために、月に飛ぶ必要はまったくありません。 これはすべて、安価な実験室および工場検査で明らかです 。 」
理由 :おそらく、設計上の欠陥です。
解決策 :設計変更。
4回目の打ち上げ
1964年3月21日。 第3ステージの操作サイトでの事故-メイン酸素バルブが開かず、第3ステージが開始しませんでした。 理由は、バルブステムの破損です。第3段階のすべてのバルブを変更する必要がありました。
理由 :設計上の欠陥。
解決策 :設計変更。
金星は助けた
1964年3月27日、金星への惑星間ステーションを備えた8K78ロケットを打ち上げました。 繰り返しますが、4番目のステージはオンになりませんでしたが、新しい記録デバイスがその上にあるという事実により、エンジンの始動時にイベントのシーケンスに関するデータが取得されました。 制御システムの設計者は、電源スイッチ(リレー)が即座に切り替わらないという事実を考慮していないことが判明しました。 スイッチの動作が遅れたため、バルブに電力が供給されず、オンになりませんでした。 4番目のステップは、中間軌道でナビゲートできず、宙返りしました。
通常、地球では、はんだごてを使用して20分で問題は解決しました。
理由 :設計上の欠陥。
解決策 :設計変更。
5回目の打ち上げ
1964年4月20日。事故、第4段階の障害、エンジン障害。 テレメトリは、エンジンの始動サポートシステムへの信号がないことを記録します。 繰り返しますが、I-100制御システムとPT-500電流トランスデューサーがテストされます。 室内試験では、I-100の一般的な温度条件が満足できるにもかかわらず、一部の部品が許容できない局所的な過熱にさらされていることがわかりました。 装置は、冷却を開始する前に、改訂のために送られました。
事故の直接の原因は最初の開始と一致し、この失敗の原因は最後まで明確ではないことに注意してください。 障害の原因の明確な決定に関する問題は、電源ユニット(PT-500、チーフデザイナーIosifyan)と制御システムユニット(I-100、チーフデザイナーPilyugin)の開発者の間で競合を引き起こしました。
理由 :設計上の欠陥。
解決策 :設計変更。
6回目の打ち上げ
1965年3月12日。 事故、第4段階の障害、エンジンの始動の失敗。 デザイナー間の関係の悪化を背景にした別の実験室テスト。 Pilyuginの従業員は、スタンドでPT-500 Iosifyanのコンバーターをチェックします。何時間も経って、考えられる理由を発見しました。バランスワッシャーがカバー固定ネジに触れて、エンジンに過負荷と障害を与えます。 緊急委員会の決定により、PT-500は2台のPT-200コンバーターに置き換えられました。このコンバーターもIosifyanが製造していますが、より古く、使い慣れています。

PT-500写真、同じシリーズのPT-1500は見つかりませんでしたが、3倍強力です
理由 :設計上の欠陥。
解決策 :設計変更。
7回目の打ち上げ
1965年4月10日。 ステーションのシリアル番号は8番に達し、打ち上げチームの役員は「月に8番をつけない」と冗談を言った。 ジョークは真実であることが判明しました-事故、第三段階の失敗。 理由は、タンクのブーストシステムの故障によるエンジンの故障です。
理由 :建設的または製造上の欠陥。 「I」ブロック(第3段階)はすでにシリアル製品であり、何度も発売されたため、生産上の欠陥が最も可能性が高いです。
解決策 :指定されていません。 単一の製造上の欠陥が修正を引き起こすことはありませんでした。
8回目の打ち上げ
1965年5月9日。 4つのステップはすべて正常に機能し、ステーションは「Luna-5」という名前で月に行きました。 しかし、すでに途中で問題がありました-ジャイロスコープをウォームアップするための制御システムアルゴリズムに割り当てられた時間が少なすぎました。 このため、軌道修正操作は1回失敗し(それでも3回目に実行されました)、月のブレーキ操作は失敗しました。 駅は月面にon落しました。
理由 :設計上の欠陥
解決策 :設計の変更、制御システムのアルゴリズムの変更。
9回目の打ち上げ
1965年6月8日。 ステーションは、「Moon-6」という名前で月に打ち上げられました。 ミッションは軌道の修正中にエンジンが停止せず、すべての燃料を燃やしたという事実により失敗しました。 理由は、地球から「ボード」に送信されたコマンドのエラーでした。エンジンの持続時間を示すのを忘れていました。 駅は月を過ぎて飛んだ。
月を過ぎて飛行する過程で、ステーションはユニットとメカニズムの動作をテストするために使用され、テスト可能なもの(ショックアブソーバーの加圧など)重要なこと-かなりの数のコメントが寄せられました。
理由 :操作エラー。
解決策 :指定されていません。 おそらく、管理者との教育作業により、船上に派遣されたチームの管理が強化されました。
10回目の打ち上げ
1965年10月4日。 ステーションは「ルナ-7」として月に着手し、問題なくブレーキングセッションの開始に到達しました。 ステーションはリアルタイムテレメトリー送信モードに切り替わり、MCCで「月の垂直線の構造があります!」、「電波高度計で測定が行われています-月まで5,000キロメートル」、「月まで4,000キロメートル」という報告がありました。 30分後、「地球の損失が記録されました」という報告がなされました。 天体方位センサーによる地球の損失は、ブレーキエンジンをブロックすることを意味しました。 駅は月面にon落しました。 事故は、地球のセンサーの角度を設定する際のエラーによって引き起こされました-地球はセンサーのまさに端に落ち、わずかな外乱は方位の喪失を意味しました。 同時に、月の垂直を構築するための機器についてコメントが行われました。
理由 :運用上の欠陥、構造上の欠陥。
解決策 :設計の最終化。 おそらく、飛行前のステーションパラメータのインストールに対する制御の強化。
11回目の打ち上げ
1965年12月3日。 ステーションは月に向かって「月-8」になりました。 確かに、制動の少し前に、地球からの命令で、ステーションが宇宙飛行の方向をオンにし、宇宙で方向を変えたが、ブレーキエンジンをオンにしなかったときに、「誤った修正」セッションが実行されました。 しかし、衝撃吸収シリンダーをブーストした後のブレーキセッション中に、ステーションは高さ測定値を失いました。 報告書から判断すると、ステーションは回転し、高度計は月を「失った」ため、エンジンがブレーキのためにオンになるのをブロックしました。 エンジンは、接触する9秒前にオンになり、ステーションは許容できない速度で月に衝突しました。
ショックアブソーバーをブーストした後の方向の喪失により、シリンダーが主な疑惑になりました。 5日間の実験が原因を発見しました-シリンダーは、加圧されるとファイバーグラスアンテナマウントブラケットに当接し、破損して鋭いエッジを形成し、シリンダーを貫通し、シリンダーからの漏れが方向を失いました。 ブラケットが破損する理由は、製造技術の違反、金型内でのワークピースの不適切な配置です。 この理由は、チェルトックの「ロケットと人々」に示されています。 同時に、代替バージョンがあります-シリンダーの加圧は、ガスエンジンのオリエンテーションシステムが対処できない妨害を引き起こしました。 この場合、決定は、シリンダーのブーストを、安定化のためのパワーリザーブがあったブレーキエンジンの動作領域に転送することでした。
理由 :生産上の欠陥(Chertok)、構造上の欠陥( Smorkalov )。
解決策 :生産における品質と制御の改善(Chertok)、着陸アルゴリズムの変更(Smorkalov)。
12回目の打ち上げ
1966年1月31日、ルナ9ステーションは正常に起動し、1966年2月3日に世界で初めて着陸に成功しました。 ステーションとの7つの通信セッションが実施され、月面のパノラマが写真から作成されました。

ここでは、3つの大きなパノラマを見ることができます。
分析
このプログラムでの事故の原因を考慮してください(他のペイロードを持つ同じ媒体の起動を考慮しない)。 失敗の場所で:
第三段階 :3
4番目のステップ :3
駅 :4
地球 :1
半分のケースでは、ステーションは単に「ターンを受け取らなかった」-失敗する前に機能していたノードであることがわかりました。 それとは別に、第4段階(ブロック「L」)の問題に注意する必要があります。 キューがまだステーションに到達した場合、ケースの3分の2を拒否しました。 同時に、発生した事故の分析は、十分な注意を払って行われた場合、地上試験中に特定および排除できる構造欠陥の圧倒的優位性を示しています。 これらの統計は、事故の結果に応じて連続的に改善することにより、製品開発の方法の天文学に不適切であることを鮮明に証明しています。
ITの結論
ITにはさまざまな領域があり、重大なバグを抱えたプログラムが正常に存在する場合もありますが、特定のレベル、カバレッジ、品質をテストするコストとバグによる損失(ユーザーの評判の低下、顧客の失敗、契約の罰金など)のバランスを取ることは常に価値があります.p。)。
また、一連の要素があり、それぞれが全体的に成功するために正常に動作する必要がある場合、中間要素をデバッグする前に再テストしても意味がないことを理解しておくと役立ちます。 簡単に言えば、「第4段階」の高い信頼性を達成するまで、「ステーションを月に送る」ことは意味がありません。
情報源
主な情報源は、紀元前3冊目の本です。 チェルトカ「ロケットと人々。 冷戦の暑い日。」
Wikipedia、 Encyclopedia Astronautica 、 GalSpace 、 ソ連の CFC 、 http: //jurnal.vniiem.ru/text/124/17.pdfの資料も使用しました。
KDPV- ソコロフの写真
ナビゲーション:タグ「Space Accident Lessons」による投稿。