5月の休日が国中を行進しているので、写真のシーズンはすでに始まっています。 誰かが遠くの土地に旅行し、誰かが村のどこかに自然に近づいていますが、私はあらゆる小さなものを脱いでいます。 マクロ撮影で人生を楽にする方法は? 今日はこれについて話すことにしました。
マクロ撮影の主な問題は、鮮明に描かれた空間の非常に浅い深さ(被写界深度)です。
ウィキが書いているように:
「鮮明に描かれた空間の深さ(被写界深度)-レンズが異なる距離にある鋭いオブジェクトを表示する能力。 それは、光学システムの最も重要な特性、つまり主焦点距離と相対開口、焦点距離に直接依存します。
IPIGに関する話は、図、プレート、GOST 25205-82を含む別の記事のトピックです。 以下の理論とのリンクを残します。
通常、被写界深度を拡大するために、絞りは閉じられます。これにより、他の問題が発生します。たとえば、光が不足するとISOが高くなり、その値が大きいとノイズがgeneしみません。 はい、そして光学の回折限界は、シャープネスで失われるシャープネスの領域を増やすときにトリックをすることができます。
小さな被写界深度に対処する方法の1つは、フォーカスエリアが関心のあるオブジェクトに沿ってシフトする複数の画像を組み合わせたフォーカスの組み合わせです。 次に、画像を相互に位置合わせし、各フレームの鋭利な部品を使用してコンポジットを組み立てます。
1つの軸に沿って撮影するときの移動の利便性のために、マクロレールが発明されました。
最も安価なモデルにはこのような構造があります。

しかし、500ドルのStackShot STKS-100-PKGなどのトップモデルがあります。 そして、これは配達なしです!
このデバイスにつまずいたので、私は即興のゴミからそれを繰り返すことにしました。
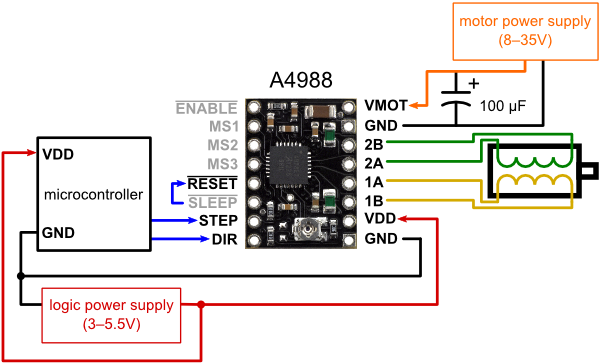
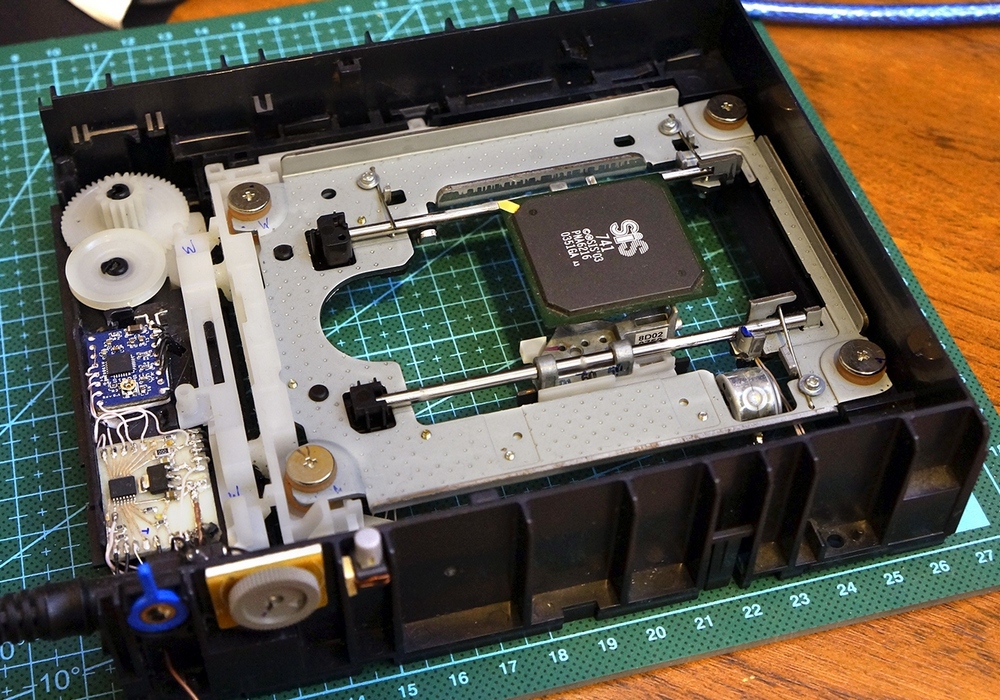
私たちが必要とする主なものはCD / DVDドライブで、すでにかなり高い精度を持っているのと同じガイドがあります。 当然、カメラ自体をそれらの上で回転させることはできませんが、撮影のためにオブジェクトを回転させると、回転します。 CDドライブのステップ制御チップのドキュメントが見つからないため、A4988チップの一般的なStepStickドライバーを使用してください。
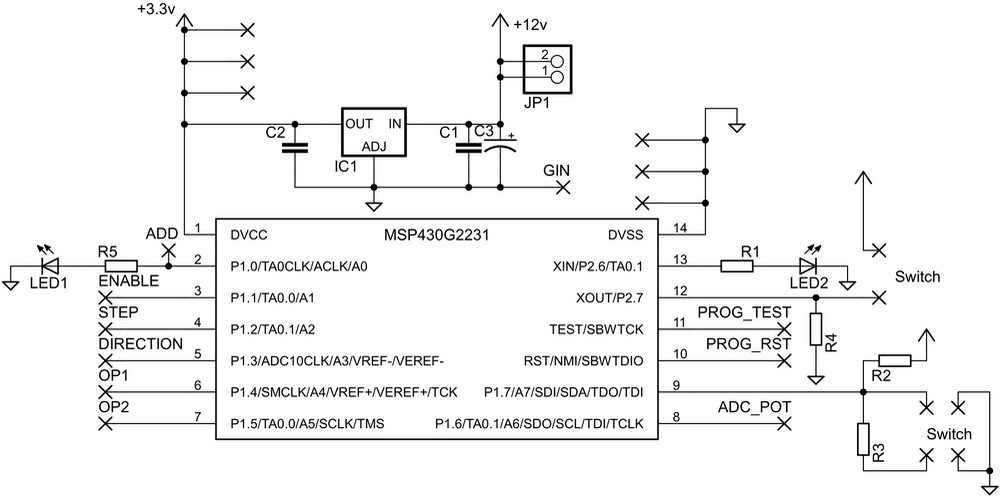
MKを接続するための最小回路:
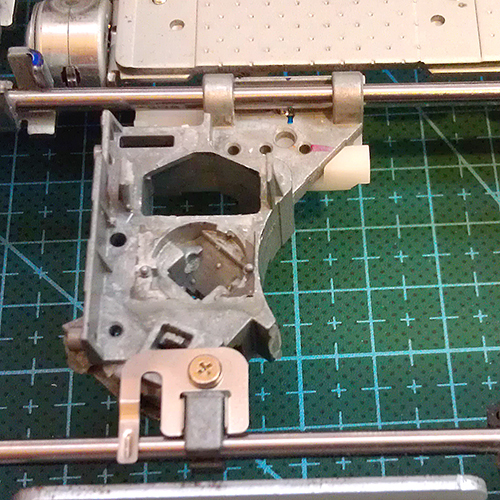
ドライブを分解する段階をスキップしますが、それは退屈です。 ボードを取り外す必要があり、非同期ドライブがドライブを回転させ、ドライブがロード/アンロードを行い、キャリッジから取り出すことができるすべてのものが失われます。 それとは別に、オープン/クローズドトレーラーが便利であり、ドライブがかなり古い場合は、オーディオアンプの可変抵抗器もカットします。 ボードの一部で切り取り、はんだ付けされた非常にクールでした。
次のようになります。
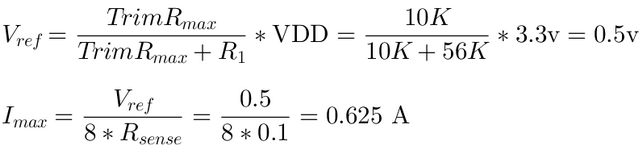
エンジンが小さいので、ドライバーから与えられる最大電流を減らすことにしました。 これは、電流の原因となる基準電圧を変更する抵抗R1の値を変更することによって行われます。
3.3vドライバーの論理部分に電力を供給する際の電流を考慮します。
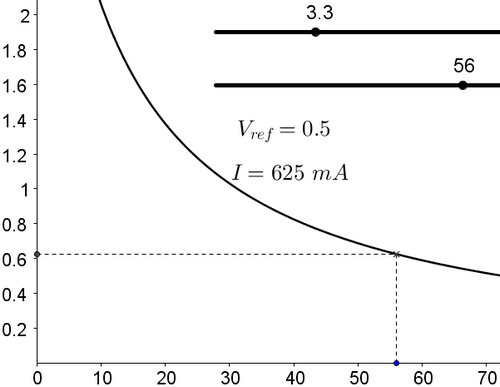
またはグラフィカルに:
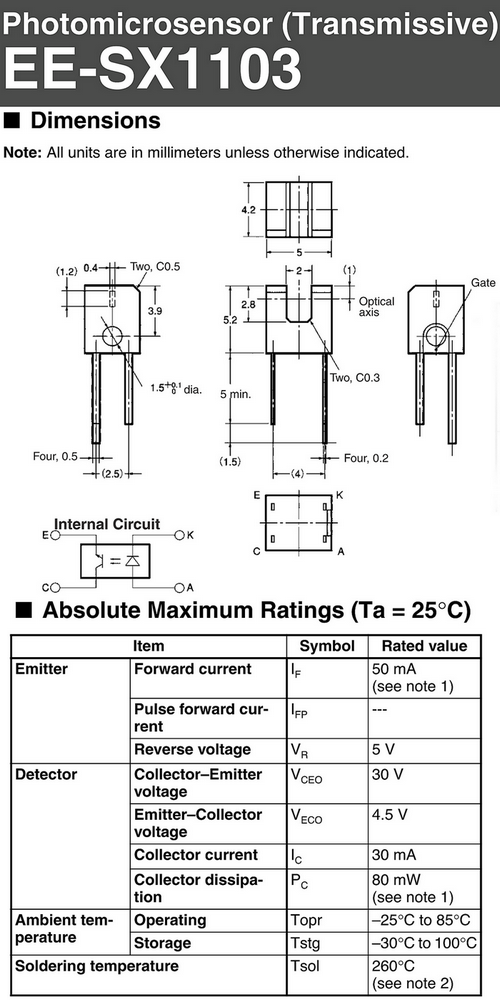
ドライバーは、クラムMSP430G2231によって制御されます。 そして、リミットセンサーとして、私はOMRON EE-SX1103オプトカプラーを使用することにしました(私は彼らがそうであることを願っています、私は写真を見ていました)。
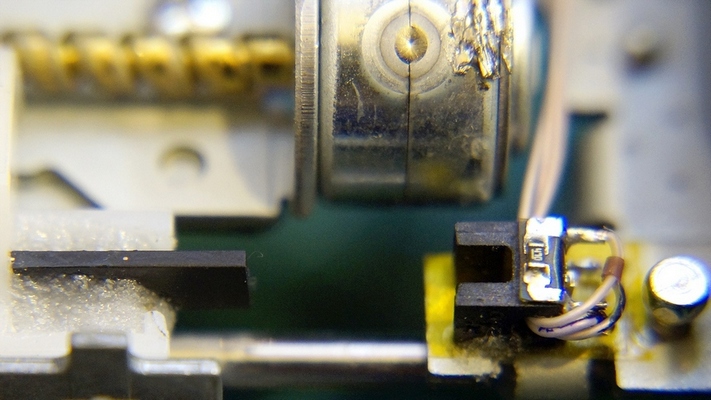
プルアップ抵抗と電流制限抵抗をセンサーに直接掛け、センサーを将来のレールのベースに接着剤で接着しました。
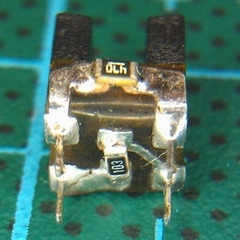
ドライブボードから空気を抜いたmikruhuをカットしたら、その残骸をキャリッジのプラスチック部分に貼り付けます。
MKのポートが非常に少ないため、センサーをポーリングするための差分スキームを拒否しました。テストが示したように、センサーは可視光の影響を受けません。
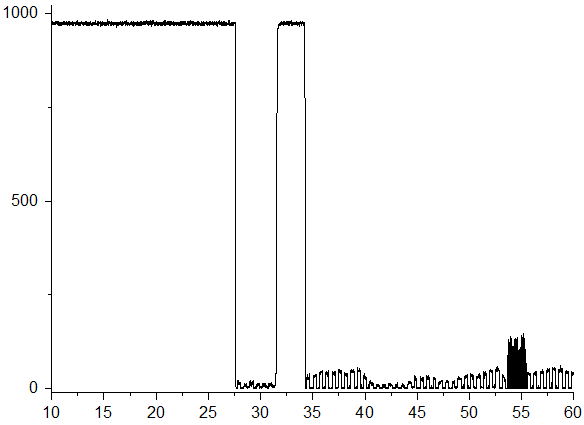
グラフでは、テストはストロボモードで懐中電灯でセンサーを点滅させ、55秒の領域のノイズが指で結論に触れます。
まだ十分な結論が得られていないため、分周器移動スイッチは多重化されており、最終的な回路は次のとおりです。
それから、いつものように、毒、トリック、はんだ付けをします。 そして、キャリッジの上で、最大のブリッジを死んだマザーボードに接着します。
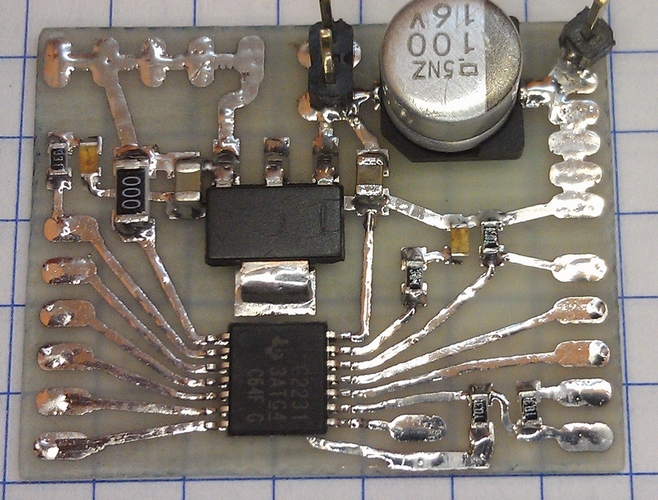
準備ができたデバイス:
仕事のアルゴリズム:
移動速度(ドライバーは速度ではなく1/16ステップモードで動作するため、精度は私にとって重要です)、または一定速度でドライバー入力へのパルスの「パケット」を制御する2つのモードがあります。 MKは、固定モードでボタンに問い合わせているモードを確認します(この場合、既に低速なマイクの動作を遅くするボタンのバウンス防止コードを記述する必要はありません)。 その後、可変抵抗器のADCは平均化のために4回平均化され、結果の数は、方向スイッチと「無音」が対応するリミットセンサーからトリガーされる場合、対応する機能に入ります。
機械的特性:
一般的な場合、キャリッジステップには1回転あたり20ステップがあります(PL15S-020からの情報)。 および3mmの親ねじ(より少ない)。 理論的には、3/20/16 = 0.009375mmまたは9.375ミクロンになります。 実際、構造の剛性は十分ではなく、プラスチックは同じであるため、小さな値で作成された「パック」は異なります。
雑草とアイデア:
LDOスタビライザーのピン配置を混同し、逆にはんだ付けする必要がありました。さらに、異なる極性の5v USBと12v電源に切り替えたため、非常に熱くなりました。
対数特性を持つ可変抵抗器を注文しました。現在、変数の表面全体の約4分の1しか使用されておらず、マタンを石に載せるのを嫌がっています。
十分なユニポーラ出力を得るには、エンジンドライバーとしてDRV8834を使用できます。 さらに、1/32ステップモード、およびDACを使用する場合は、ほぼ「無限」の区分(TIアプリケーションレポートSLVA416、「DRV88xxシリーズの高解像度マイクロステップドライバー」)を取得します。
たとえば、フィードバックを強化して、リニア(磁気)エンコーダーの動きの精度を高めることができます。 あまり考えていませんでした。この場合、電子機器をやり直す必要があります。その後、コンピューターに接続を追加できます。
スタッキングの例として
喫煙者のスタッキング

健康な人のスタッキング

健康な人のスタッキング
被写界深度の理論の詳細については、 こちらをご覧ください。
WikiドライバーStepStick 。