「 知識の対象としての人間は、自然科学全体の鍵です 」
テイルハルト・デ・シャルダン
“ 常にパスに新鮮な風が吹く ”
民俗の知恵
「 パックが飛ぶ場所に移動していますが、現在の場所ではありません... 」
ウェイン・グレツキー
パート1 記述的
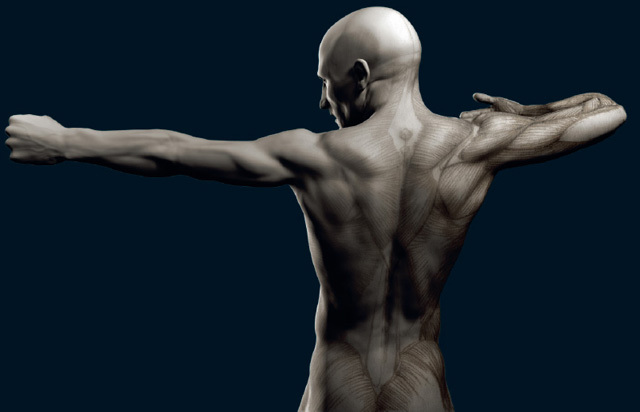
アスレチックビルド、高速、正確な動きが目を捉え、美しく強力な手で簡単に簡単に手術器具を操作します。これは、現代のさまざまなポリマー材料の新しいテクノロジーによって作成されたロボットアバターである人体モデルのテストテストを見る方法です。 グラフェン電池のエネルギーは人工アスリートの体内に生命を吹き込み、彼の神経は光学的に活性なメタマテリアルであり、高度にコヒーレントな放射であると考えられ、彼の脳は光学プロセッサのニューラルネットワークです...
叙情的な始まり
それでも、この素晴らしい写真は現実のものになりつつあります。 現在、超小型物体を高い精度で再現するための技術が作成されており、特定の機械的および物理的特性を備えたポリマー材料を発明および取得し、収縮性および導電性効果、逆光屈折、圧電効果、高導電性効果を実現しています。 生体力学的開発は極端な精度に達し、運動の網羅的な数学的装置が記述され、正確なマンマシンインターフェースが活発に作成されています。 科学者の手の中には、自由で微妙な動き、会話、聴覚、血液循環、呼吸などを提供する野生生物と建築形態によって作成された精密工学工学ソリューションの形の素晴らしい手がかりがあります。
物理的な継続
次の科学的な成果は、叙情的な始まりの背後にあります。
-生体システムの解剖学と生理学が詳細に研究されました。
-生体力学およびそのモデリングの方法を正確に研究し、静力学および力学における人間および動物の身体のパラメトリックな3次元モデルの形で提示しました。
-プレゼンテーションと分析のマトリックス法を使用して、生体のマルチレベルの構造と機能を記述する数学的装置。
-さまざまな印刷方法を使用して、数十ナノメートルのオーダーの寸法を持つ3次元オブジェクトの高精度コピーを作成する機能。
-3次元印刷に適した多くの作成されたポリマー(光学活性、収縮性、強誘電体、メタマテリアル、悪名高いグラフェンなど)。
-生物学的オブジェクトに実装された情報の伝送および処理のプロセスのモデリングにおける量子光学の成果。
-ニューロインターフェース、有機興奮性構造、さらには非常にコヒーレントな放射線の生物学的ソースの作成における成果。

物理学と生物物理学、数学と遺伝学、生物学、光学と材料科学、化学、サイバネティックスと人類学:科学的思考の進化は急速に進んでおり、今では人体の感覚運動システム-バイオニックロボット、アバター、人体の非常に正確に制御されたコピーを開発する機会を提供しています。
「なぜこれが必要なのですか?」
-あなたが尋ねます。 最初に頭に浮かぶのは、困難で危険な労働条件にある人の過小評価です。 人に生物学的に近いタッチインターフェースを備えているため、そのようなロボットは、人が必要な場所、正確な手、微妙な動き、視覚、聴覚、人が健康と命を失う可能性のある場所で必要になります。 ダイビング、地下、高所作業、消火は、アバターダブラーを必要とする明らかな活動です。
警官が制御する警官ロボットは、危険なサービスの非常に明白な代替手段です。 経験豊富なオペレーターが管理する航空攻撃および偵察部隊の行動は、人命を失うリスクなしにはるかに効果的です。
人間の動きと感情を備えた複数のロボットアバターの助けを借りて、資格のある外科医1人が、地球の遠く離れた場所に非常に効果的に支援を提供できます。 宇宙への飛行は、最終的に、このようなロボットによって正常に複製できます。
2番目に思い浮かぶのは、支援と人間の動きのシステムのプロトタイピングの概念を作成することに基づいて使用される多くの技術の適用です。 これを人工メカノスタットと呼びます。これは、動的にサポート、移動、保護する形で実装された、階層的に構成された制御された感覚運動アナライザーの機能を実行するシステムです。 データの蓄積を伴う生物学的システムのメカノスタットの理論は、その一貫性をますます失いつつあるため、この用語は(今のところ)非常に自由に使用します。
テクノロジー:
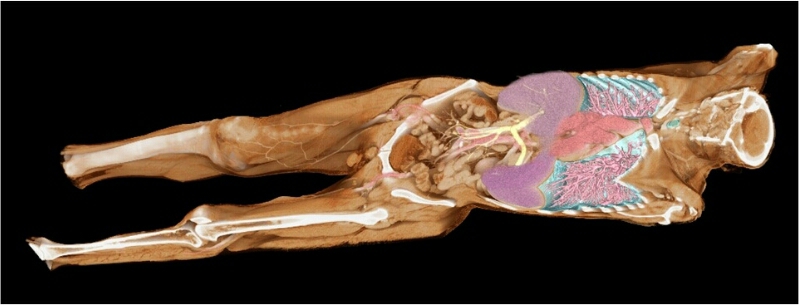
1.すべての解剖学的構造の保存と再現を考慮して、生体の運動のダイナミクスを研究するには、診断方法を正確に選択する必要があります。 これらの方法は選択され、開発され、医師の手にとって非常に強力な診断および予後診断ツールになります。 今日、運動中の臓器と組織の相互可動性の評価は、オープンフレキシブルコイルを使用したトモグラフでの非常に高解像度ではありません(オープン垂直アパーチャを備えた特別なスキャナーはまだ使用できません、それらのスキャン結果は高品質のインジケータを持っています)または狭い研究軌跡(超音波検査)平均分解能であり、測定限界が完全に明確ではない。 2平面X線撮影では、複雑な骨の軌跡の正確な測定結果が得られますが、変位した軟部組織の画像は提供されません。
体のセグメントの動きのマクロ撮影は、皮膚の完全性の条件でのみ議論できます。つまり、活発な動きの撮影は、生きている人の表層でのみ可能です。 死体の準備された組織ブロックの組織の可動性は、正確な実際の動きを与えません。 一般に、動いているセグメントのすべての構造の微妙な関係を視覚化するための信頼性が高く、非常に必要な診断キネシオグラフィー法が必要であり、ご覧の通り、それはありません。
2.結果の複雑な画像は、パラメトリックCADモデルにフォーマットされます。 最新の設計システムを使用すると、セグメント内の動きの特徴をシミュレートし、その最適性を評価し、個別に最適化された本格的な人工カプセル靭帯装置を備えた生体工学的人工装具または関節内部人工装具の修正セグメント、モデルを作成できます。 再構成されたプロテーゼの寿命と動作品質は、明らかに、非常に大幅に増加するはずです。 未来を少し見てみると、活性ポリマーを使用し、複雑な神経インターフェースを追加すると、生成された感覚と能力の点で身体のほとんどとは異なる生体の部分を得ることができます。 バイオニック補綴物の個別化の重要な尺度は、間違いなく、多くの病気、怪我、およびその結果の治療の長く持続的な効果の基礎となるでしょう。

3.高度な解剖学的同一性を持つ作成されたモバイルポリマー組織ブロックは、外科医が現代の低侵襲手術のセクションで高度な複雑さと責任のスキルを開発するためのトレーニング支援として使用できます。 既存の訓練施設は、あまりにも形式的であり、外科医の行動の単純な図を作成するか、価格とサービスが非常に高価であり、運動感覚スキルを習得する上で差がないか、外科医の感染のリスクを保持する死体の組織ブロックです複雑な準備、保管、大量の文書が必要です。
関節鏡検査、脳を含む身体の多くの領域の内視鏡手術、多段階の複雑な外科的介入-現代の外科領域のスキルは、かなり短時間で確実に移植できます。 もちろん、正式なトレーニングツールではなく、フルタイムの助けを借りて、非常に珍しい患者の今後の複雑な介入を実行するなど、さまざまな病状をシミュレートすることができます。 現在、外科医向けのトレーニング複合施設とトレーニング方法を作成する技術を開発しています。 私たちの意見では、このアプローチは、高度な解剖学的対応を有する人工組織ブロックでの外科医の持続的で信頼できる運動感覚スキルの形成を可能にします。

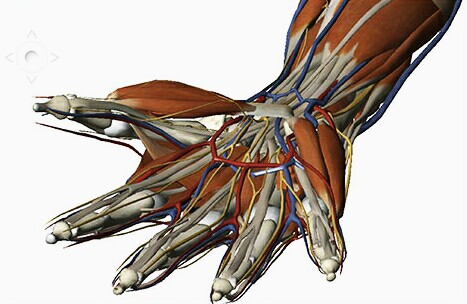
可動関節の作成における生体力学的原理の適用により、メカニクスの多くの技術的問題を解決することができます。 たとえば、マルチリンクサスペンションは、かつては自動車業界の大きな一歩でした。 人の手首と中足骨は、直線運動を角度に変換することで負荷を再配分できる最適なマルチリンク構成です。 自然な建築ソリューションを実装する金属製ショックアブソーバーの設計は、より信頼性が高く、耐久性があり、動作がはるかに優れているようです。 このようなソリューションのシンプルさと優美さ、デバイスのアクティブで簡単な制御性により、旅行ははるかに快適で安全になります。
さらに多くの例と驚くべき事実をお伝えしたいと思いますが、今度はいくつかの結果を要約します。
1.明らかに、科学技術における自然な建築的および機能的ソリューションの有望な応用。
2.生物学的物体の構造と機能のための複雑な数学的記述装置があります。
3.異なるタイプの3次元印刷を使用して、高精度で複雑な3次元オブジェクトを作成する可能性があります。
4.生物学に近い特性を持つ活性ポリマー化合物を作成する方法があります。
5.光エレクトロニクスに基づいた人工神経プロセスのモデリング方法が開発されています。
6.神経インターフェースとそれらのためのソフトウェアが活発に開発されています。
Ich will ...
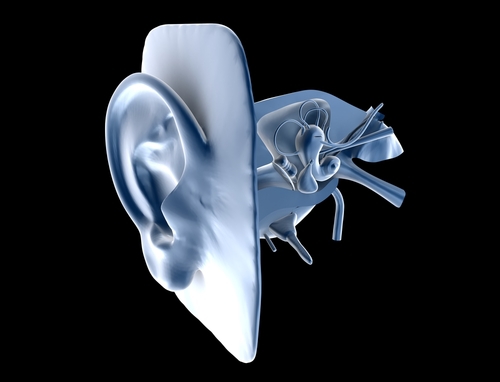
近い将来、私たちのタスクは、マイクロバイオメカニクスの研究に基づいて、身体の個々のセグメントのプロトタイピングと見なされます。 最も重要なポイントは、スリップ複合体(摩擦の生物学的ペア)を再現する必要があることです。これは、いわゆる多眼吸収型スライドシステムです。 生物学的オブジェクトの滑空を提供する構造は、フラクタル関数によって記述される擬二十面体の自己相似のマルチレベルの形態的組織を持っています-これは運動組織のミクロレベルです。 マクロレベルでは、非常に興味深いセクションは「肘-前腕-手首-手首」セグメントのプロトタイピングです。前腕は弾性ねじれ変形の対角軸を備えた平行六面体であり、手首は3リンクの機械システムであり、手首は1つの連続したミステリーです...それぞれの関節の平面の相互に垂直な配置の条件下で、3つの軸の周りに沿って同時に実行されるセグメント 椎骨。 ロボット工学のこの段階では、静的および動的を制御するためのエンジニアリングソリューションが問題であり、自然はその繊細なソリューションを提示しているため、必須のソリューションを必要とする別のタスクはサウンドおよびバランスアナライザーのプロトタイピングです。
私たちの意見では、問題は非常に興味深く、非常に有望です。 進化的に重要な自然工学ソリューションのプロトタイピングの概念である「生物学的意味」の探索-有用な適応結果は非常に合理的です。 時間が経ち、この科学は作成されていない分野でも非常に人気があります。
この記事の目的は、私たちのアイデアを聴衆と共有し、さまざまな分野の専門家の意見を聞いて、検索の範囲を広げ、おそらく産業全体を作成する意志を持つ人を見つけることです-バイオニックロボット、多くの科学と与えおそらく何十年もの間、何千人もの科学者にとって、興味深く実りある仕事の可能性。