Arduino、Bluetooth、Androidをベースにした自家製ロボットの概要。
ハブに関する記事に触発されて、私もロボットを作ることにしました。 最初は、これはすべて非常に複雑でほとんど理解されていないように見えましたが、このトピックを研究するにつれて、現代の技術に基づいたロボットの作成は非常に簡単であることがわかりました。 電気工学とC ++の学校物理学の知識は役に立ちましたが、実際には最小値を知る必要があり、入学しきい値が低いです。
最初は、スペアパーツ用のロボットを組み立てるか、既製のキット(キット、デザイナー)を購入するかの選択がありました。 私は長い間選択しましたが、ロボット工学の経験と知識はないと考えた後、「Arduino用Bluetooth制御ロボットスマートカーキット」に決めました。

はんだごてを使用せずに、ロボットを組み立ててプログラムするのに必要なものがすべて揃っています。 唯一のマイナスは指示なしです。 しかし、その後、インターネット上で英語と中国語の貧弱な指導が見つかりました。 このデザイナーキットは、中国の小学生や学生向けに作成された疑いがあります。
コンストラクターに付属しているもの:

ギア付き4 xモーター;
4 xホイール(ホイールマウントは高品質ではないため、ゆるんで緩み始めました。セルフタッピングネジで固定する必要がありました)。
4 x取り付けモーター(アルミニウム棒);
2 xプレキシグラスプレート(100 x 213 x 5mm);
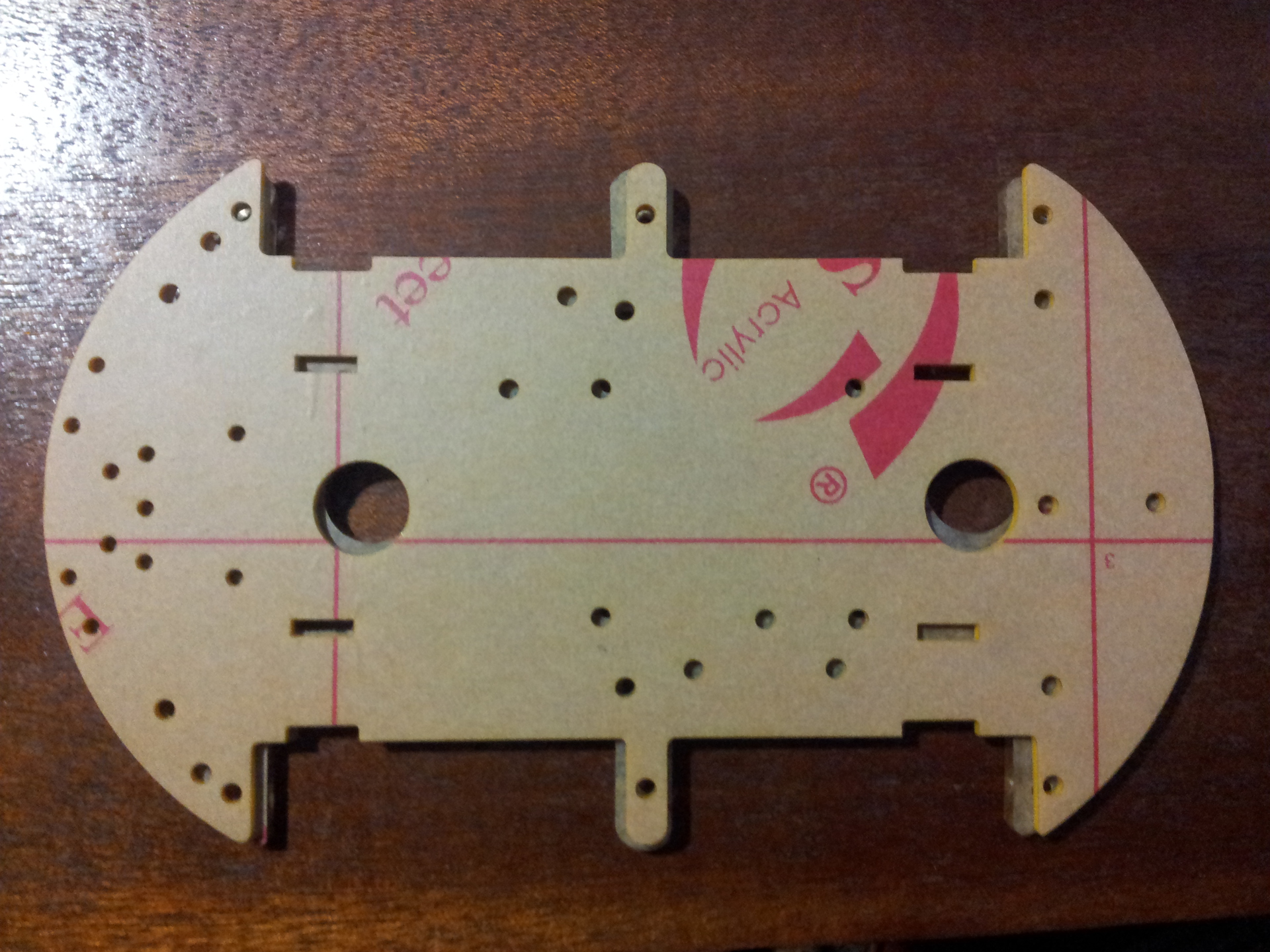
プレート上で、私は別々に言わなければなりません、私がそれを集め始めたとき、1枚のプレートがオフセットで曲がって切断されて、2番目のプレートに合わなかったことがわかりました。 どうやら彼女を切り取った中国人は酔っていたようです。 したがって、私自身は合板から新しいものをカットする必要がありました。
1 x L298Nモータードライバー;
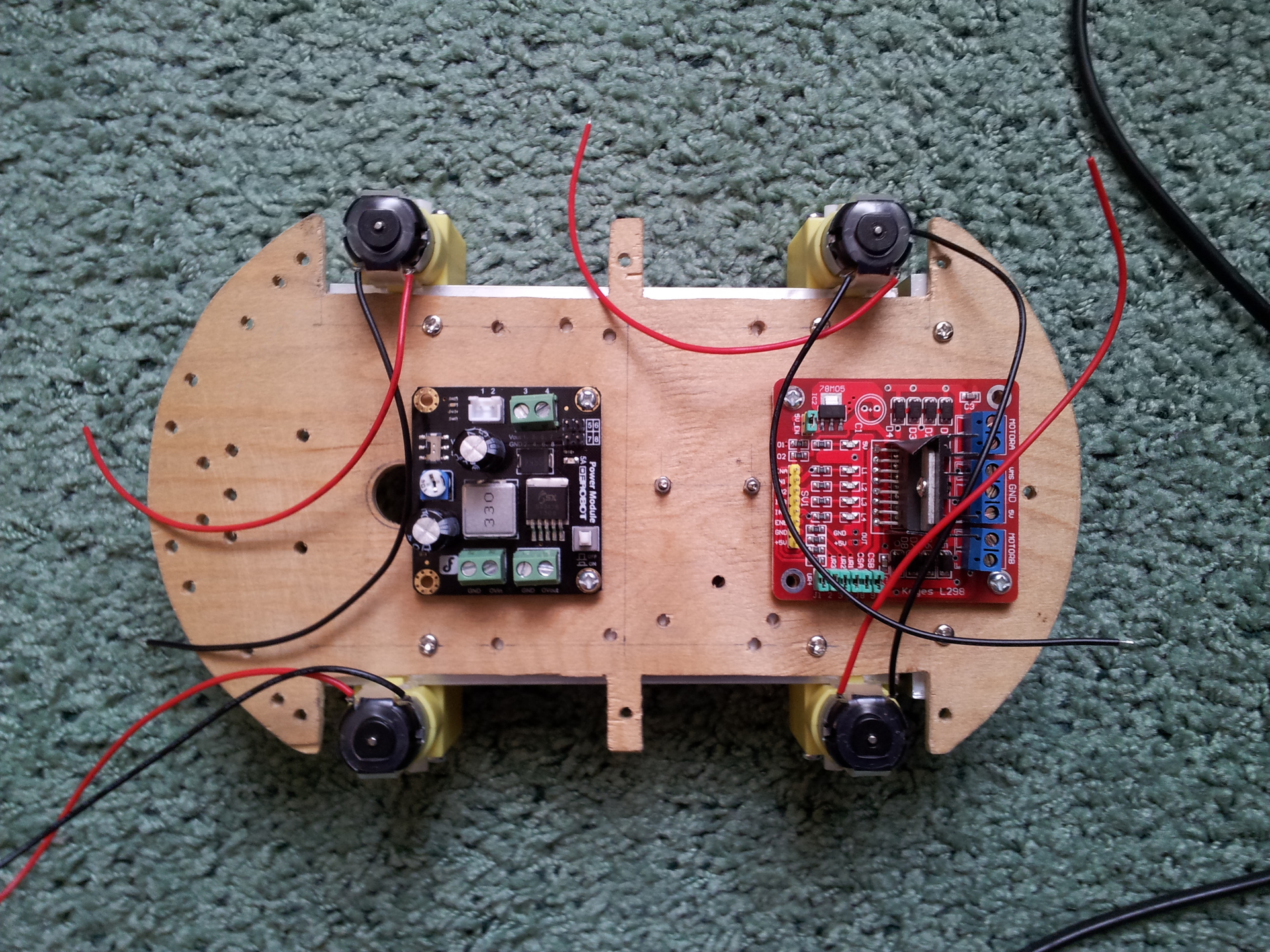
写真では、彼は右側にあります
1 x Arduino UNO;
1 xセンサーボードV5-arduinoの2階。センサーの周辺機器、はんだ付けなしのサーボ、ブレッドボードを接続します。
1 xバッテリーホルダー;
1 x Micro Serva;
1 x超音波-超音波距離計;
3 xラインセンサー;
1 x赤外線レシーバー;
1 xコントロールパネル;
2 x 18650バッテリー(セットには、ほとんどすぐに1つのサブメジャーの低品質バッテリーが含まれていました)。
1 x 18650バッテリー充電器;
1 x Bluetoothモジュール;
1 x USBケーブル50cm;
30 xワイヤー;
15 xピラー(6 x 35mm / 3 x 20mm / 6 x 6mm);
必要なすべてのネジとナット。
インターネット上の散在する情報によると、それを組み立ててプログラムすることができました。 設計者はL298Nエンジンドライバーを使用します。これにより、2Aを介して2チャンネルの電力を供給し、信号でPWMモーターの速度を調整できます。 最初のプログラムは実際にはエンジンを制御するだけでした。 その後、超音波距離計を使用してプログラムを開始しました。ここではすべてが非常に簡単です。 しかし、赤外線リモコンからの制御では、苦しむ必要がありました。 一般に、このコントロールは不安定で、特定の角度の視線でのみ機能し、常に機能するとは限らないため、すぐに拒否しました。 私はすぐにブルートゥースコントロールを理解しませんでしたが、すべてがそこで非常に簡単です。 通信は、シリアルポートとUSBケーブルを介してまったく同じように構成されます。 Android搭載の携帯電話でBluettooth SPPプログラムを使用しました。必要に応じてボタンをプログラムし、シリアルチャンネル経由のログを保存しておくと非常に便利です。
その後、多くの実験が行われ、デザイナーとarduinoの能力が調査されました。 要約すると、私はすべてが非常に簡単に機能し、好きなようにプログラムでき、部屋の周りを移動するロボットが感情と満足の嵐を引き起こすと言うことができます。 とにかく、これはものすごく面白い趣味です!
その後、マニピュレーター用マウント、赤外線シャープ距離センサー、電圧降下レギュレーター、エンコーダーを備えたサーブを注文しました。 徐々に、ロボットはあなたがビデオと写真で見ることができるものに変わりました。

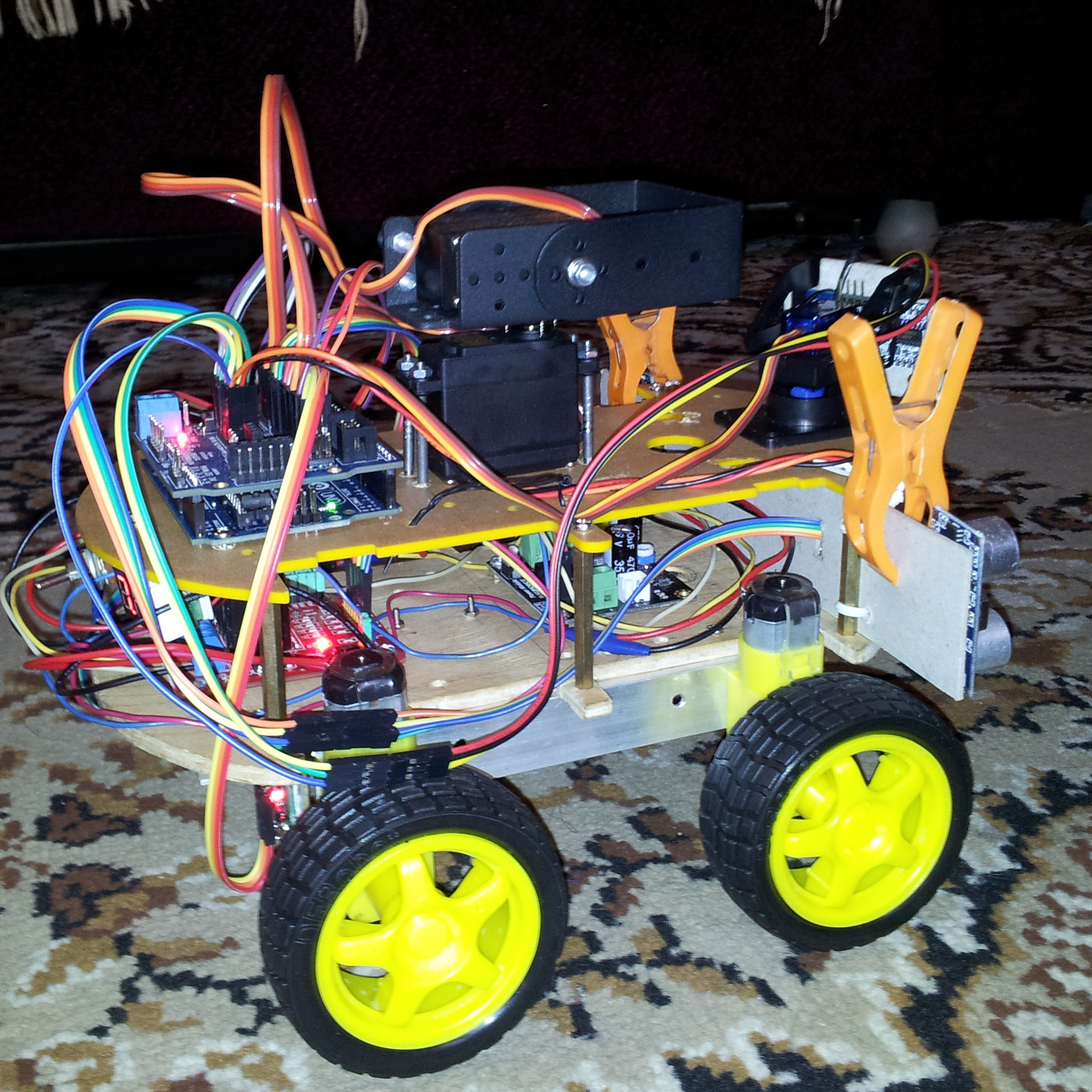
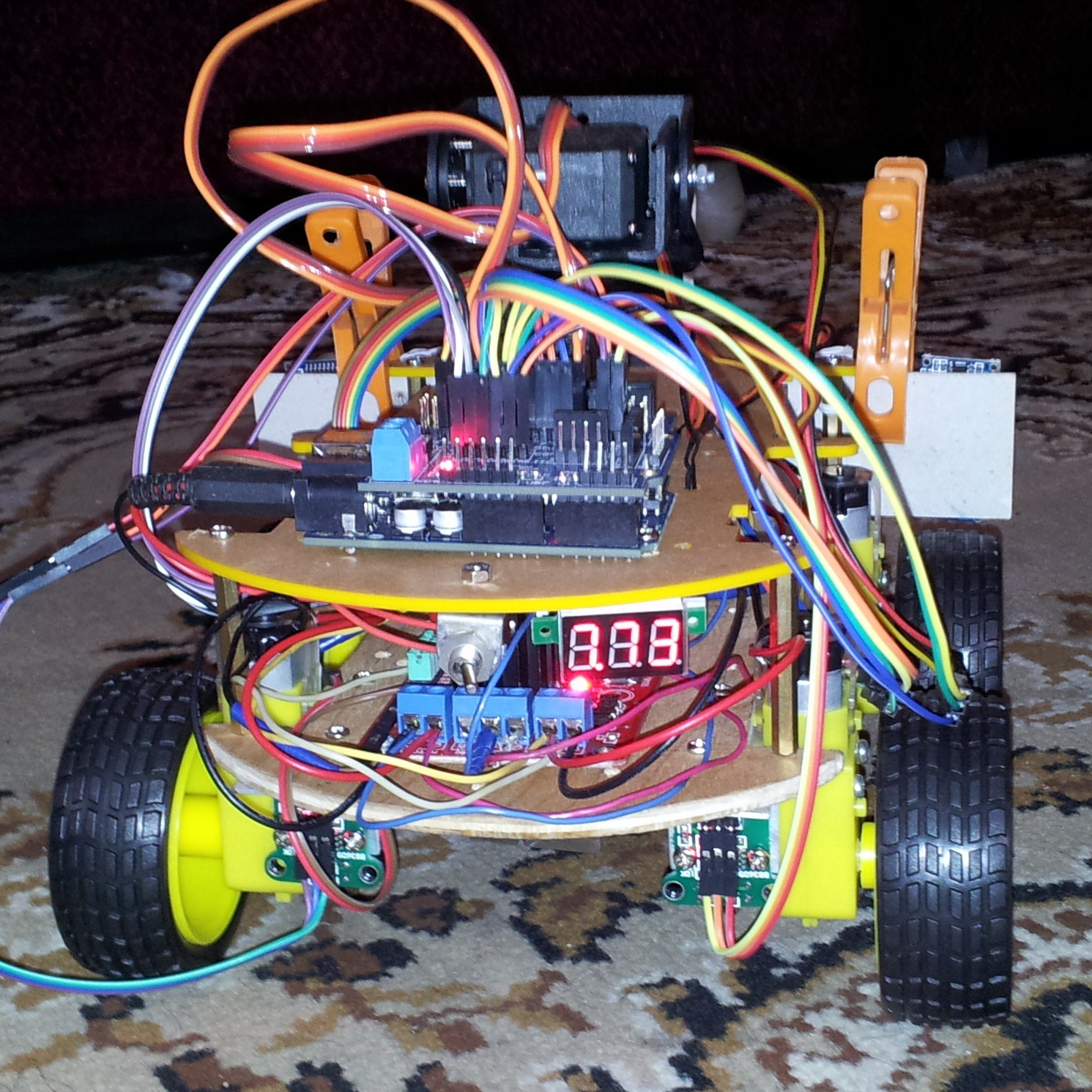
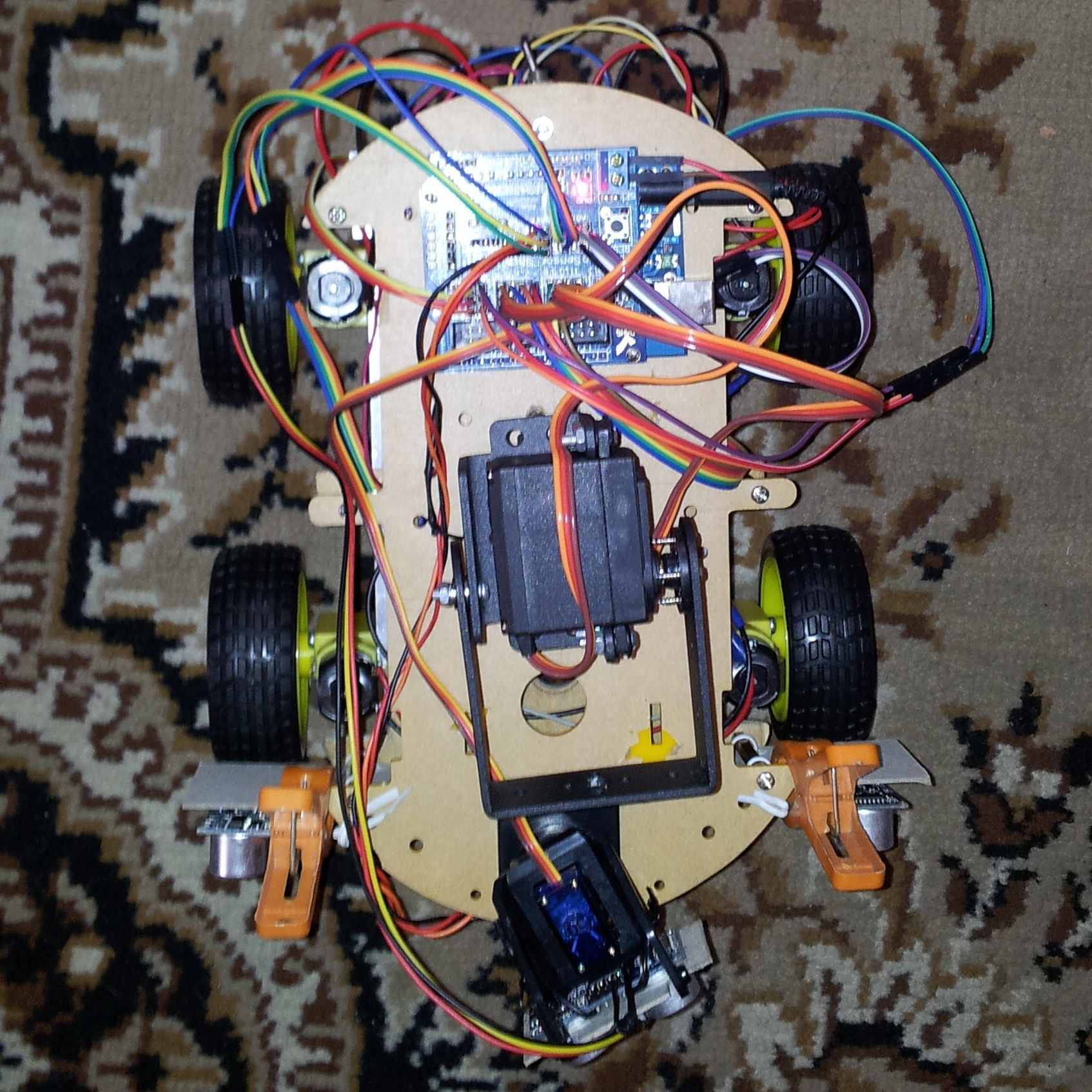
現時点では、ロボットは電話からの制御下で、または距離計の自動モードで移動します。 アンドロイドのプログラミングを静かに理解しています。いわば、そこで脳の活動をすべて転送する予定だからです。
まだ解決されていない多くの問題/タスクもあります。 特に、超音波および赤外線距離計は完全に自律的な移動には不十分であり、ロボットは依然として障害物にぶつかることがあります。 この問題を解決する方法はありますが、ロボットの基本的な変更が必要になるので、今のところ考えています。
私は、ロボットをゼロから組み立ててプログラムする方法についてのレッスンを行うために、ロボット設計とソフトウェアに関するオープンソースプロジェクトを作成する予定です。
ロボットの改善に関する定期的なビデオブログを継続してここに記事を書くので、私をサポートし、次の記事を書くトピックに関するコメントを書いて、ビデオを撮影します。
PS:図面、サイズ、ソースをグループhttps://vk.com/club23358759で公開します