
こんにちは
AeroQuad Open Sourceプロジェクトと、quadrocopterの構築における私の経験について少しお話ししたいと思います。
AeroQuadプロジェクトは以下をサポートします。
1.将来、GPS、フライトをウェイポイントに接続する機能。AeroQuadConfiguratorからダウンロードできます。
2.カメラの安定化。 クアドロコプターの動きを補正するために、3つのサーボを使用できます。
3.オンスクリーンディスプレイ。 ビデオストリームにグラフィックをオーバーレイします。
4.加速度計と磁力計のジャイロスコープを接続することに加えて、超音波距離計や気圧計などの他のセンサーを接続することができます。
すべてはArduino Mega 2560の購入から始まり、LEDを点滅させるだけに飽き飽きして、クアドロコプターを組み立てることに決めました。 手でいいおもちゃを作りたかった。 プロセス自体は非常に興味深く、魅力的です。 マイクロコントローラーを探索するための素晴らしいオプション。
約2時間かかる場合。 1日あたり、2〜3週間後には、空中でクアドロコプターをテストすることができます。
ビルドプロセス:
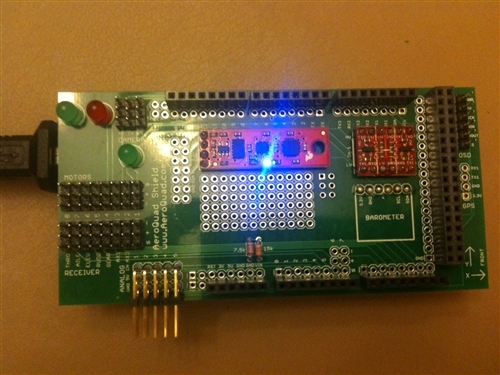
1. AeroQuad Shield v2.1は、配線の数を大幅に削減し、組み立てプロセスを簡素化します。 こちらで30ドル以上の送料で購入できます。 既製を購入しましたが、配送には約6か月かかりました。 初めてこれをやった。
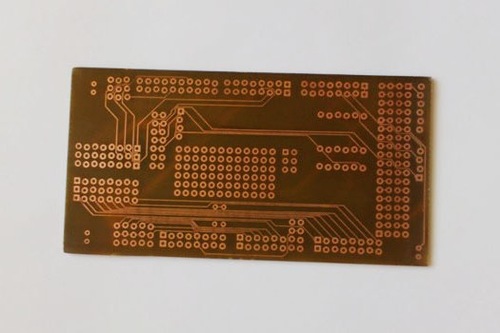
ソースはこちら

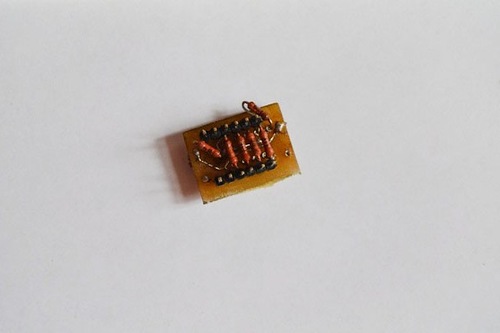
2.ロジックレベルコンバーター。 約2ドルかかります。
(10kΩの抵抗8個とnチャネルMOSトランジスタ2個。合計:8ルーブル。)
少し曲がっていますが、動作します。
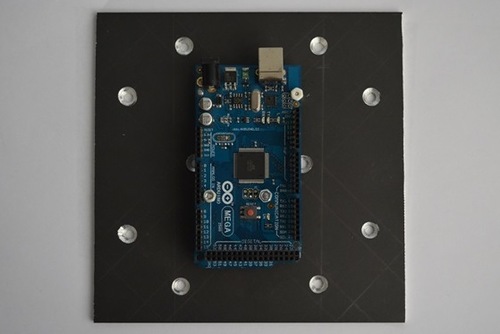
3. Arduino Mega 2560

3. 9自由度。 AeroQuad Webサイトの価格は99ドルです。 24ドルです。 (ITG3205ジャイロスコープ)
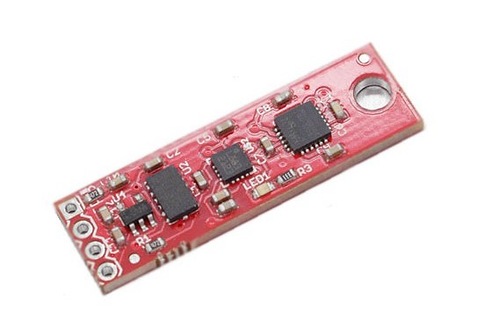
ITG-3200ジャイロスコープ(ITG3205)、ADXL 345加速度計、HMC5883L磁力計が含まれます。
はんだ付けするときは、非常に注意する必要があります。私のジャイロスコープは静電気により劣化しているため、はんだ付けする必要がありました。 新しいチップの価格は700rです。
4.バロメーターBMP085($ 20)
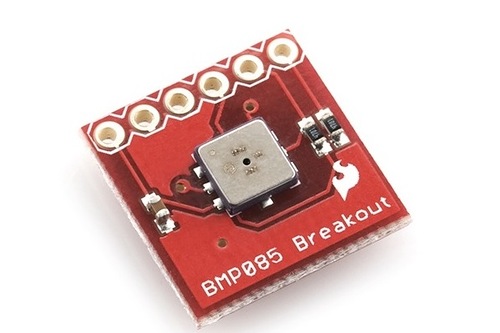
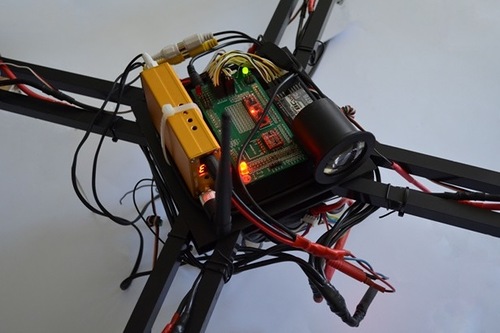
アセンブリは次のようになります。
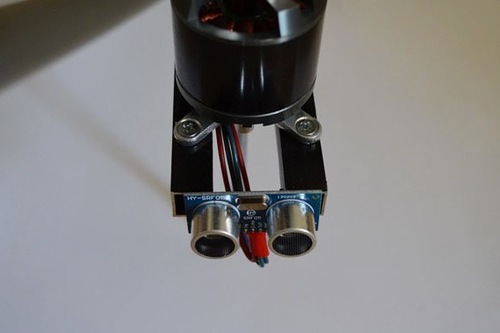
5.超音波センサー。 LV-MAXSONAR-EZx (1個あたり1500ルーブル)少し異なるものを使用しました。
6. GPS。

7. RU。 フォーク機器RU Turnigy 9x。 60ドル

8.エンジン。 NTMプロップドライブ50-50 580Kv / 2000W(1個で37ドル)+ NTMプロップドライブ50シリーズアクセサリパック(1個で2ドル)


もちろんバストエンジンを搭載。 NTM Prop Drive 28-36 1200KV / 530Wで十分です。
9.コントローラー。 HobbyKing 100A ESC 4A UBEC(1個で40ドル)

10.バッテリー:
FPV用Turnigy nano-tech 4000mah 3S 25〜50C Lipo($ 28.51 $)
Turnigy nano-tech 1600mah 3S 25〜50C Lipo for RU($ 14.92)
Turnigy nano-tech A-SPEC 5000mah 6S 65〜130C Lipo($ 145)

11. Turnigy Accucel-6 50W 6Aバランサー/充電器

12. FPF
FPVに使用するキットを尋ねられたとき、単一の答えはありません。
周波数について:
900Mhzは優れた貫通力を備えた範囲ですが、この機器では長距離を飛行することはできません。
1.2 / 1.3 GHZは、伝送距離が長い良好な周波数です。 さまざまなメーカーのさまざまな価格と品質のキットを幅広く取り揃えています。
2.4 GHZ-距離と貫通能力はわずかに低くなりますが、より良い品質のビデオを送信することは可能です。
5.8 GHZ-短距離および貫通。 この周波数のプラスは、無料でクリーンなエーテルです。
私自身は、1.2 GHz、1 Wを選択しました。

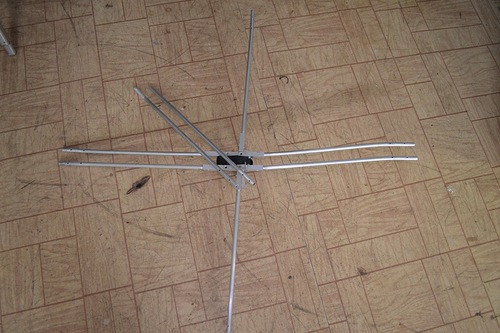
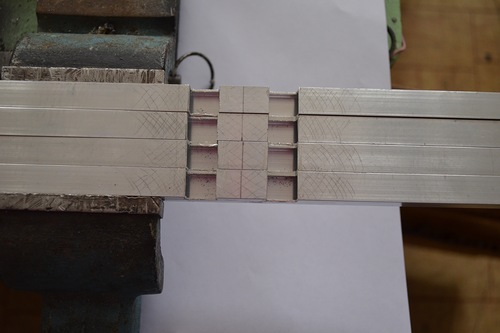
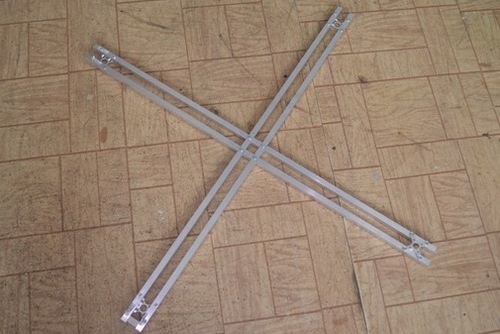
ワイヤフレーム。
自家製から既製のソリューションまで、あらゆる種類のオプションを見つけることができます。 私自身は、アルミニウムのプロファイルを作成することにしました。
最初のオプションはあまり成功しませんでした。
いくつかの写真。 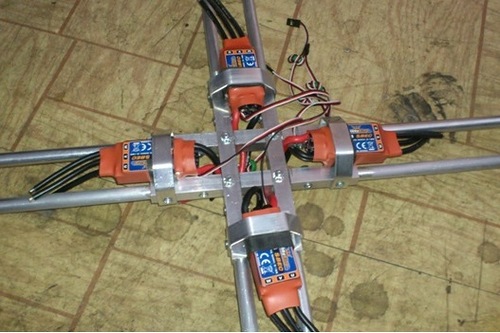


着陸に失敗した後、それは価値がなくなりました。
着陸に失敗した後、それは価値がなくなりました。
二度目は少し強くなった。

集合農場の少しをボードを保護するために。 しかし、安価で信頼性が高く、実用的です。

塗装済みで、最初のテストの準備ができています。
セットアッププロセスは非常に簡単です。
1. Arduino IDEをインストールします。
2. AeroQuad_v3.2をコンパイルします 。
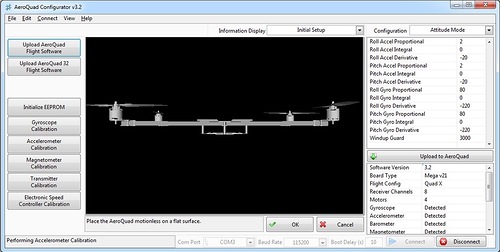
3. AeroQuad Configuratorで、指示に従ってすべてのセンサーを一度に1つずつ調整します。
一般的に、すべての詳細なアセンブリ手順はこちらです。
1つのヒント:余裕を持ってプロペラを購入することをお勧めします。
センサーをキャリブレーションする前に、最初のテスト飛行のみをアップロードし、クアドロコプターが床に固定された部屋に連れて行きます。
ビデオの残りの部分は、壊れたプロペラを交換した後、小包を待っています。