
数年前、私はしばらくの間、非常に小さな会社で働く機会がありました。その会社は、とりわけ、さまざまな電気制御パネルの製造に従事していました。 作品自体は退屈であり、生産も小規模であり、シリーズ内での修正もあります。 実際、対応する一連のドキュメントに従って、単一の製品のアセンブリが取得されました。
当然、組立順序を覚えるのは難しいので、各手順は組立説明書に規定されており、各組立工程で指示を確認する必要があり、かなりの時間がかかりました。
また、この生産方法では、1人で製品を完全に組み立てると、コンベアで各作業を行う10人以上が頭で忙しくなり、不注意や疲労による組み立てエラーの可能性が高くなります。
会社の経営陣は、従業員に労働生産性の向上を目的としない合理的な提案を奨励しました。そこで、どこでそれを増やすことができるかを探し始めました。電気パネルの組み立て時間が大幅に加速されたようです。
過去数年間、マイクロコントローラによって制御される可動式サスペンションに取り付けられた従来のレーザーポインターを含むアセンブリテーブルの上にあるデバイスを使用して、アセンブリプロセスを高速化できるというアイデアが生まれた瞬間を覚えていません。パネル内のさまざまなブロックの端子にワイヤを接続するシーケンス。
したがって、光点に続いて、コレクターは、ドキュメントを表示することによって気を散らすことなく、シールドで必要なすべての接続を行います。
さらに、すべてのワイヤが異なっており、コレクターが異なるツールを使用していることも明らかです(厳密に指示に従って)。 ここではすべてが簡単です。 シールドを組み立てるすべてのワイヤ、ブロック、およびコンポーネントは、インジケータLEDでマークされたコンテナに配置されます。 ツールは、インジケータLEDでマークされた場所にも表示されます。
組み立てプロセス中、プログラムに従って目的のコンテナのLEDが順番に点灯し、レーザーの光点がシールド内でワイヤが接続されている点に到達します。 コレクターはこのコンテナからワイヤーを取り出し、ワイヤーを目的の場所に接続し、デバイスまたはツールにあるボタンを押して次のステップに進みます。 ライトポイントは次の接続ポイントに転送され、コレクターはワイヤのもう一方の端を接続します。 機器を変更する必要がある場合は、可聴アラームが使用され、目的の機器がある場所でLEDが点灯します。 したがって、一般的には、システムは機能するはずです。
実際、その会社で働いていなくて、設計することにあまり意味がなく、ビジネスでデバイスを検証することができなかったとき、デバイスの簡略化されたデモ版を組み立てたので、デバイスが製品の組み立てを本当にスピードアップしたとは言えません。 しかし、関心は犠牲になりました。今、私は、初心者向けのこのような理解できないデバイスを持っています-アセンブリ操作のシーケンスへのポインタ。
組立順序インジケータを使用した操作の原則
レーザービームの軌跡、コンテナインジケータの包含、音声信号の包含など、シールドアセンブリシーケンスのすべてのコマンドは、ファイルのSDカードに記録されます。 ファイルには、フロントパネルのボタンで選択された最大100個のアセンブリシーケンスを含めることができます。

habrahabr.ru/post/213803で詳しく説明されているように、デバイスをオンにしてSDカードを初期化すると、デバイスはレーザービームアライメントモードに入ります。 必要に応じて、矢印ボタンを使用して、梁をアセンブリテーブルのマークされた条件付き中心に移動し、[OK]ボタンを押して固定します。 その後、上/下矢印ボタンを使用してアセンブリシーケンスを選択し、右矢印ボタンを押して開始します。 シーケンスは、ステップバイステップモードで開始されます。 各アセンブリ操作の後、右矢印ボタンを押して次の手順に進みます。
アセンブリシーケンスの連続表示を有効にするには、Mボタンを押します連続アセンブリシーケンス表示のLEDが点灯します。 ステップバイステップの説明に戻るには、もう一度Mボタンを押します。
SDカードにポイントの座標(最大256ポイント)を記録するモードがあります。 これを行うには、[OK]ボタンを押しながらデバイスの電源を入れ、ボタンを離します。 次に、矢印ボタンを使用して、レーザービームをアセンブリテーブルに取り付けられた完成品の目的の場所に順番に移動し、[OK]ボタンを押してビーム位置を固定します。 この場合、デジタルインジケーターの値が1つ増え、次の記録ポイントの番号が表示されます。 Mボタンを押すと、固定点の座標がファイル内のSDカードに書き込まれ、アセンブリシーケンスエディターで使用できるようになります。
建設業
アマチュアデザインの製造における主な難点は、ボディおよび一般的には機械部品の製造です。 壁として、金属プロファイル60x27 mmを使用しました。 同時にレーザーサスペンションフレームとして機能するデバイスのフレームは、文字通りはんだ付けされ、金属部品でリベット留めされています。
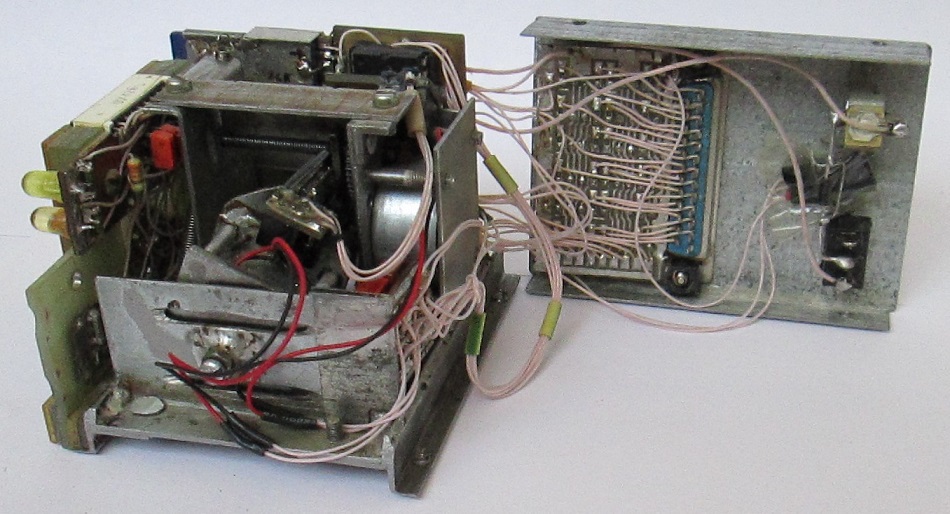
サスペンションモビリティは、2つのDCモーターを使用して実現されます。
最初のエンジンは減速ギアを介してネジ付きシャフトを回転させます。減速ギアでは、長方形のナットが移動し、シャフトに沿って走る壁に片側を擦り付け、ナットのスクロールを防ぎます。
レーザーはレバーに取り付けられ、一方の端はエンジンに対して固定軸上にあり、もう一方の端はバネによってナットに支えられています。
したがって、ナットの並進運動は、左から右へのレーザーの角度偏差に変換されます。
同様に、第2のエンジンは、第1のエンジンによるレーザー偏向の方向に対して垂直方向に、レーザーとともに第1のエンジンを偏向させる。 前後に。
(ここではシャフト全体に沿って平らなプレートがあり、押しナットにはこのプレートが挿入されるスロットがあります。)
使いやすい電動レーザーポインターサスペンション。

大きな歯車の平面は、IRダイオードとフォトトランジスタの間の隙間を通過します。 ギアに穴が開けられ、定期的にフォトトランジスタへの光束が開かれ、パルスがマイクロコントローラーの入力に送られ、これらのパルスがこれらのパルスを読み取り、レーザーの現在位置を決定します。
モーター電源ボードもシャーシに取り付けられています。 ボードは、フリーフレーム要素に装着されたクリップの形で半分に折り畳まれたブリキ板にはんだ付けされています。
残りの構造は、電動サスペンションのこのフレームの周りに組み立てられます。 これは、コントロールボタン、インジケーター、SDカード用の自家製スロット(当時は購入することは解決不可能な問題でした)を備えたフロントパネル、ソケットにマイクロコントローラーを備えたボード、および内側のバックカバーに取り付けられたLEDマトリックスアレイ用のコントロールボードです。
ピエゾエミッターは、ランダムに残っている空きスペースに押し込まれ、実際にはたまりません。
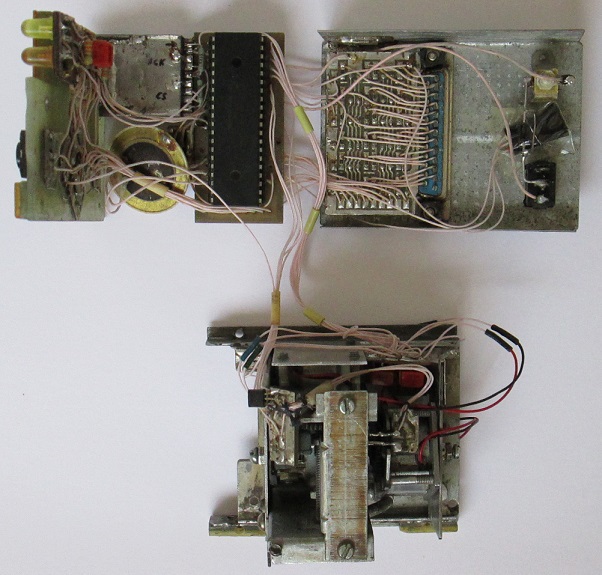
フレームの下部には、アセンブリ操作の次のステップへの外部移行ボタンの光検出器があります。
電源コネクタ、電源スイッチ、およびインジケータLEDのマトリックスを接続するためのコネクタは、背面の壁に表示されます。

回路

デバイスはPIC18F452マイクロコントローラーによって制御されます。
SDカードでの作業は、SPIプロトコルに従って実行されます。
音声信号のトーンは、PWMモジュールによって設定されます。
キーボードと組み合わされた標準スキームによる動的表示。 BD-A51289のマーキングが付いた7セグメントの2桁のLEDインジケーターが使用されます。
モータードライバー-エミッタフォロワーに含まれるKT315 / KT361トランジスタペア。 モーターの消費電流は約50mAです。
仕様によると、RF-300Cエンジンは5.9V向けに設計されていますが、電圧が3.6Vに低下しても非常に正常に機能します。
前述のレーザー偏向角センサーのフォトトランジスターはVM-12ビデオレコーダーから取られたもので、一部のIRダイオードは濃い青色です。 VCRで使用される小さな白熱電球の代わりに最適です。
LEDインジケータのマトリックスは、シールドパーツを備えたコンテナでは8x8 = 64、アセンブリで使用されるツールでは4x4 = 16であり、24本の電力線が必要です。したがって、3つのレジスタ74HC374の8ビットマイクロコントローラポートの拡張回路が使用されます。
アセンブリ操作の次のステップに移動するためのリモートボタンは、使用する各ツールにインストールすることになっています。 ボタンを押すと、赤外線を介してデバイスに送信されます。
TSOP-1736モジュールは、光検出器として使用され、テレビでの使用向けに設計されており、36 kHzの周波数で動作します。 リモートボタンユニットのマルチバイブレーターは同じ周波数に調整されています。 TSOP-1736にはオープンコレクター出力があるため、デバイス自体の次のステップボタンと並列に直接接続されます。
デバイスの背面にあるコネクタを介して接続された外部+ 5V電源から給電されます。
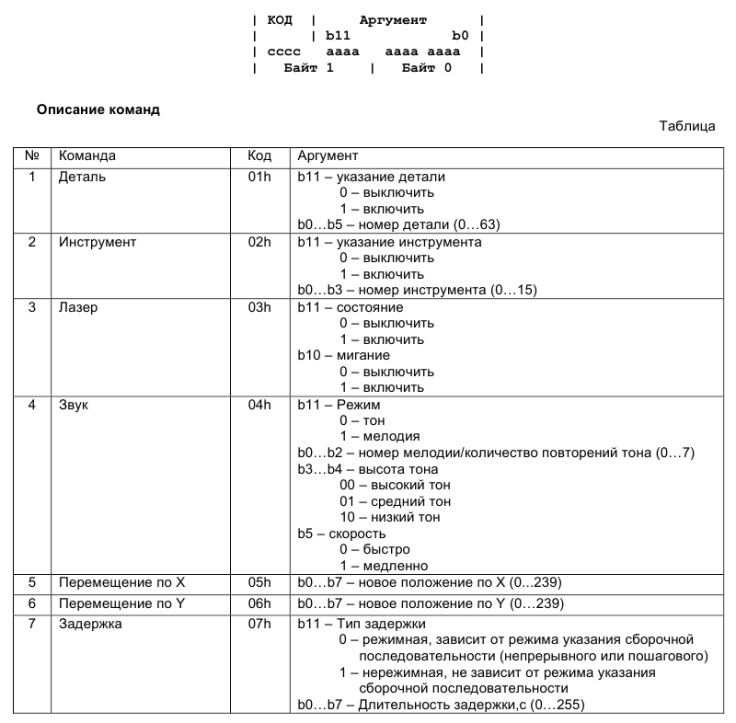
コマンドシステム
すべてのチームは2バイトです。 最初のバイトの上位4ビットはコマンドコードです。 残りの12ビットは引数です。
合計7チームが使用されます。
アセンブリシーケンスエディター
エディターはシンプルで、簡単です。
以前にシールドに記録されたポイントの座標は、右側のパネルにロードされます。
ライトポイントを特定の位置に移動するコマンドはこのパネルから選択され、残りのコマンドは左パネルから設定されます。 この場合、アセンブリシーケンスコマンドは中央パネルにプレーンテキストで表示され、1行が1コマンドに対応します。 この行は、コマンドのニーモニックと説明のコメントで構成されています。 エディターはニーモニックコードをSDカードに書き込むためのコードに変換します。SDカードはアセンブリシーケンスセットファイルに追加され、デバイスのマイクロコントローラーが操作中に読み取ります。
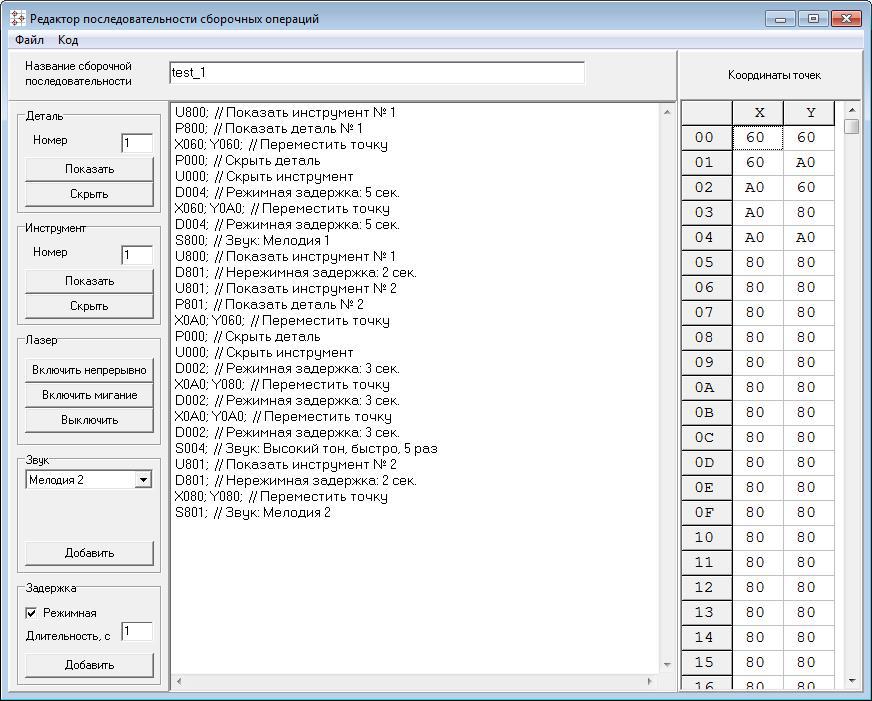
スクリーンショットの例では、アクションがエンコードされています:パーツNo. 1を取得し、ツール1で2ポイントで修正し、ツール1を2に変更し、パーツ2で3ポイントで修正します。 モード遅延により、操作の時間を正規化できます。 非モーダル遅延は、ツールを変更するときに使用され、使用されたばかりのツールを配置する場所を簡単に示します。 この場合、次の手順に進むためにボタンを押す必要はありません。
それも動作します
上記プログラムのビデオ作品。
おわりに
繰り返しになりますが、開発は非常に古いものです。 現在、触れられているトピックの開発は、たとえば次のような拡張現実技術の使用に向けられているようです 。
コードを提供しなかったのは、第一に、それらが失われ、そして念のために、第二に、誰かが突然このアイデアを繰り返したい場合、そして、いずれにしても、それは現代の要素ベースに基づいて完全に異なる実装になるからです、より正確な機構、32ビットコントローラ、大画面、ネットワークアクセスなどを備えています。