今日は、興味深いモバイルルーターHAME MPR-A100 (HAME MPR-A2に類似)についてお話したいと思います。 このデバイスは、特に「キッチン」ロボット工学にとって興味深いようでした。私はそれについて話すことにしました。 この記事は次のように作成します。最初にルーター自体について説明し、次に、即興の素材から車輪付きのシャーシ上で最もシンプルで安価なボットを構築します。 前回よりシンプルで安価になります。
そして最も重要なことは、質問への答えが見つかりました-「クローゼットにある古いフロッピクをどうするか?」
主な利点は、箱からすぐにすべてのストラップが付いたかなり大きなバッテリー( 5000mAh )があり、 そこにOpenWrtをインストールできることです。 ファンタジーを接続すると、このルーターに基づいた多くの新しいソリューションを入手できます。

1.ルーター自体の概要。
在庫ファームウェアとこのルーターの標準アプリケーションについては何も言われないので、レビューは非常に奇妙です。 ストック機能の概要は、問題なくネット上で確認できます。 たとえば。
偶然にも、ウクライナのオンラインオークションの売り手の1つ(売り手の座標が必要な場合は、書いてください)で、5200mAhのバッテリーを搭載している消費者(Powerbank)を充電できるモバイルルーターを見つけました。
少しグーグルは、 かなりまともなハードウェアが内部にあり、さらにOpenWrtがそこにインストールされていることを知りました 。
価格と機能が嬉しく驚いたので、私はこの奇跡と実験を注文することにしました。 このデバイスは約40ドルの価格で入手できますが(場所によって価格は大きく異なります)、バッテリーとハーネスが内部にあります。 同様の容量の外付けバッテリーだけでどれだけのコストがかかるか簡単に確認できるため、価格は驚くべきものです。 ストック機能を思い出すと、さらに興味深いものになります。
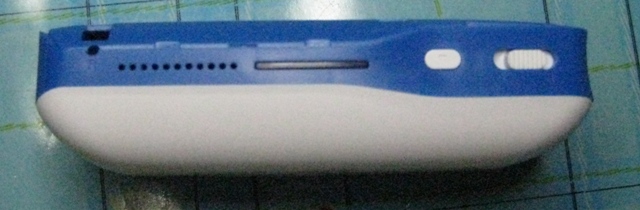
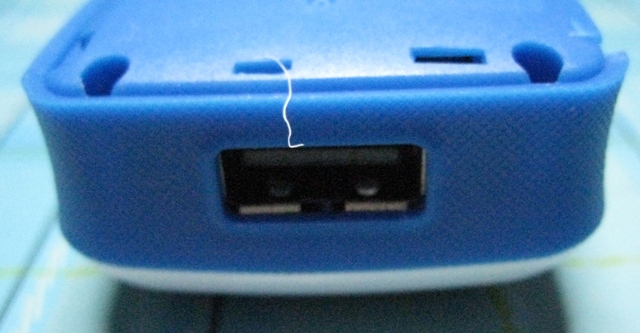
外観は非常にフレンドリーで、すべての港の予定は予測可能であり、驚きはありません。 便利なのは、バッテリーの状態を確認するためのボタンが側面にあります。 4つのLEDを押すと、「電気」がどれだけ残っているかがわかります。
写真のおむつ。 



内部も予測可能です。バッテリーは2つの18650セルで構成されており、保護ボードが付いているようにも見えます。 バッテリーはルートレスですが、4000mAhは確かです。もっとあるかもしれませんが、私は実際に測定を好転しませんでした。 (静電容量を測定するための電圧変換と参照方法のジャングルには入りません。必要に応じて、最も有名な18650をそこに置くことができます。)一般に、100倍以上説明してください。
写真のおむつ。 

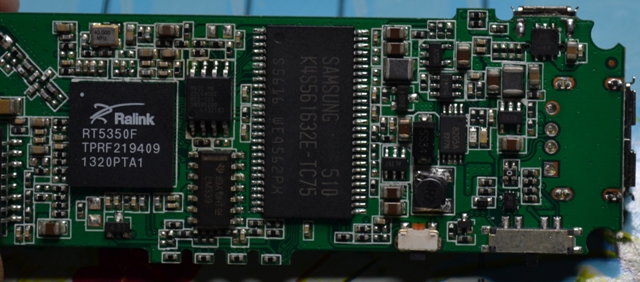

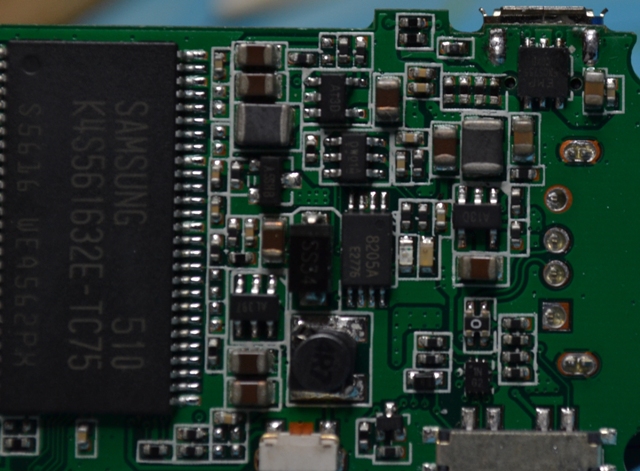
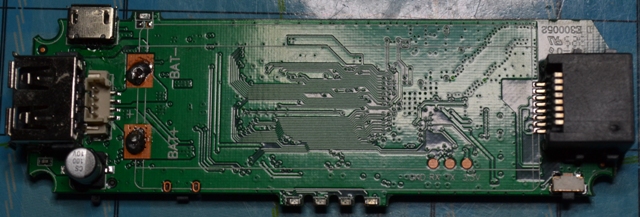
具体的には、回路を分解することには意味がありません。興味のある人は誰でも写真の中のマイクロ回路の名前を考えることができます。 バッテリーがないとルーターが機能しないことに気付くでしょう。つまり、ルーターから電力が供給されており、外出先でバッテリーを充電および再充電する何らかのハーネスがあります。 もちろん、このようなバッテリーの「バッファ」使用は摩耗につながる可能性がありますが、バッテリー自体の価格はそれほど高くなく、標準です。 任意の18650をインストールできます。
2.乗ろうとします。
次に、最も単純な3輪の「カート」を組み立てますが、それでも十分なクロスカントリー能力、所定の場所でのターン(タンク)、およびコンポーネントの最小コストを備えています。 このようなルーターだけでなく、一般的には少なくとも完全に自律的に使用できます。
私は、誰でも利用できるコンポーネントを使用して、さまざまな目的のために単純なシャーシを組み立てるという考えを長い間さまよっていました。 それが起こったことを願っています。
4つの基本的なもの(およびささいな些細なことの山)だけで乗ります:
1.最もシンプルで安価なサーボのペア(3 $ * 2)
2. Arduino Mini(9ドル)
3.古いフロッピー($ 0)
4.ルーター(25〜45ドル)
そのため、コンポーネントの準備を開始します。
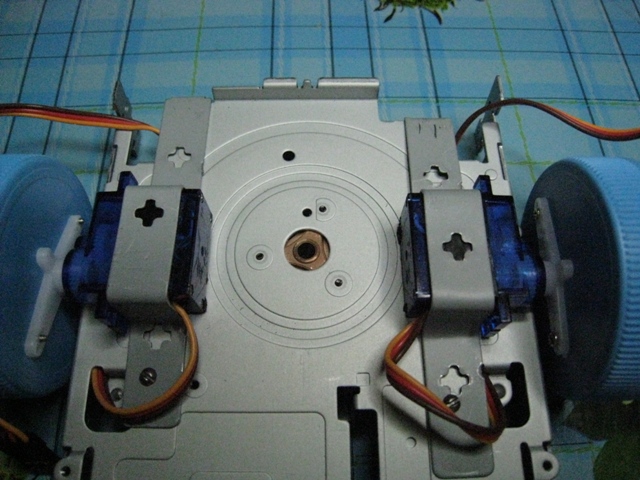
フロッピーまたは科学フロッピードライブ 。
一般に、かなりフラットなパネルであれば十分です。 2つのサーボと3つ目の無料の基本的な自作ホイールを固定または接着するだけで十分です。 しかし、それは面白くないでしょう。 また、フロッピーを分解した場合でも、これらのパネルプラットフォームのいくつかを、ドリルしやすいかなり柔らかい金属から一度に入手できます。 まあ、そしてボーナスとして、他のかなりのゴミの束。 必要に応じて、フルタイムのステッピングモーターを使用できます。将来のために残しました。 外付けドライブエンクロージャー全体を取り出して、すべてを内部に隠すことができます。


これらのパネルのサイズは小さなボットに非常に適しており、ハードウェアを取り付けるための多くの穴もあります。 同時に、金属シャーシのおかげで、デザインは非常に強力なままです。 これは、RUマシンのプラスチックケースではありません。
Arduino
私はサイズのために再びArduinoミニを取りましたが、どんな類似のボードでもかまいません。 主なことは、そこからサーボを操縦できることです。 さて、十分なメモリがあるように。 このプロジェクトでは、Atmega8では必要なものをすべて詰め込むことはすでに困難であったという事実に直面しました。

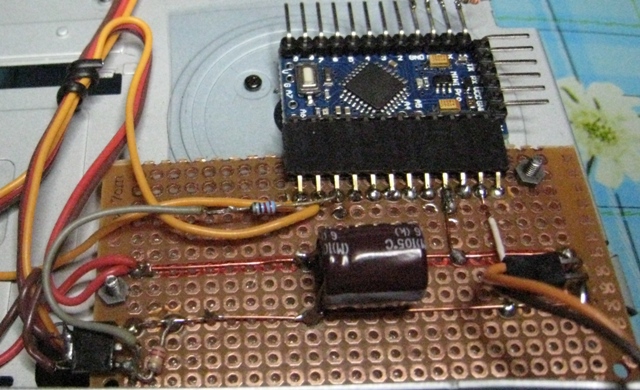
ルーターに接続するため、および2つのサーボを接続するために、便利なコネクタをボードにはんだ付けします。 ご希望の場合は、ヒンジ取り付けですべてを行うことができますが、注文のために、より安価なブレッドボードを装着します。 そのため、何かを「再接続」する方が便利です。
ルータから電力を得るUSBテールをはんだ付けし、サーボでArduinに電力を供給します。 必要なものすべてを供給し、Webカメラも接続できることを期待して、USBの「マザートゥマザー」テールの助けを借りてこれを行いました。

より多くのデバイスをルーターに接続する場合は、 PTZ Webカメラに関する記事で説明したように、USBハブを使用できます。
また、5ボルト以上のより大きなコンデンサを追加しました。 これは、サーボを起動するときの電圧降下に対する保護です。 そしておそらく、それは「オンボードネットワーク」の他の波紋を滑らかにするのに役立つでしょう。
サーボ
これが最も興味深いです。 理論的には、サーボは180度または360度(ほぼ)しか逸脱できません。 乗り方 答えは簡単です-ファイル(ナイフとはんだごて)を変更します。
サーボは通常のギアボックスですが、完全な回転を防ぐストッパーが付いています。 可変抵抗器が軸に取り付けられ、制御ボードはこの抵抗器の位置を監視し、それを希望の角度の抵抗と比較し、希望の角度(希望の抵抗)に達するまでモーターを回転させます。
可変抵抗器を定数に置き換えるとどうなりますか? サーボドライブは常に設定された回転角度に到達しようとします。ストッパーを取り外すと、コントロールボード付きのギアモーターが得られます。 さようならLM293!
写真のおむつ。 




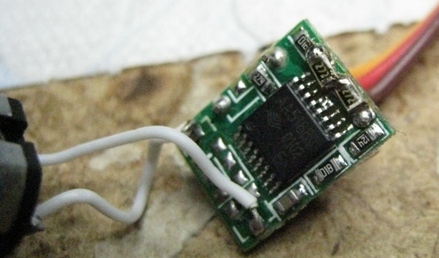

サーボドライブを分解し、ギアの位置を撮影して記憶します。 可変抵抗のインピーダンスを測定し、2つの半定数に置き換えます。 つまり、インピーダンスが5KΩの場合、それぞれ2つの2.5KΩをはんだ付けします。 古い母から入手したsmd抵抗器を使用することさえできました。 可変抵抗器を入手することもできますが、私はその上に設計を維持しました。 カットオフストッパーを除き、サーボを元の状態に戻すことができます。
さて、サーボが90度に設定されている場合(プログラムでゼロから)、「ギア」は立ち、100度に設定されている場合は一方向に回転を開始し、80であれば他の方向に回転します。 90度と設置するものの差が大きいほど、ギアの回転が速くなります。 その結果、速度を調整する機会を得ました。 ここにそのようなライフハックがあります。
ただし、実際には、わずかなドリフトがあり(サーボがゆっくりと回転またはガタガタ鳴る)、選択方法によって、1つのサーボの「中間点」を89度に、2番目のサーボの「中点」を85(スケッチの右)に設定しました。 この位置では、1つのサーバーのみが静かにガタガタ鳴りますが、回転しません。
ボットはすべて同じ観測機能を実行すると想定されていたため、CMOSトランジスタを使用して、トロリーが立っているときにサーボをオフにする機能を追加しました。 したがって、サーボの「うめき」と不要なエネルギーコストが回避されました。
写真のおむつ。 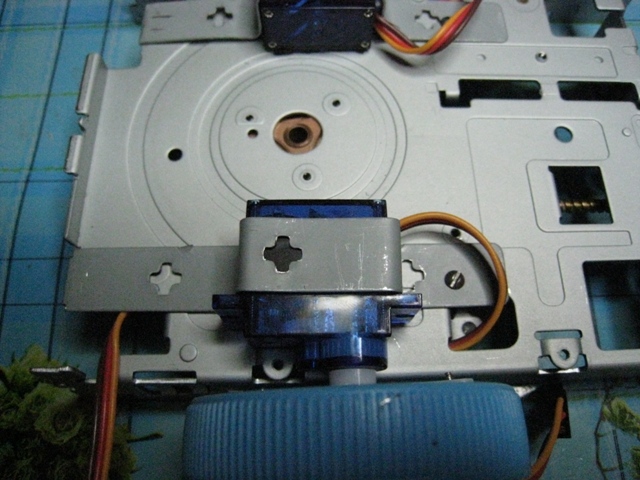



車輪についてのいくつかの言葉。 ホイール自体は、あなたはすでに何から理解されています)任意のサイズが利用可能です)私はクラッチにお金のためにオフィスのゴムバンドをいくつか置きました 3番目のサポートホイールは、文字「P」で湾曲したクリップに取り付けられた大きなビードまたは即興の素材(鉱山など)から最も簡単に作成できます。 あなたは家具のスーパーマーケットを襲撃することができます。
ルーター
ルーターが目的の処理を実行するには、適切に準備する必要があります。
鉄に関しては、ワイヤを内部UARTにはんだ付けするだけです。 接触パッドは電池の下にあり、署名されています。 また、USBでarduinoを使用する場合、これを行うことはできません。

ソフトウェアでは、事態はより深刻です。 ルーターにOpenWRTをインストールする必要があります。 準備完了アセンブリは既に存在します。 フラッシュ方法はこちらで読むことができます 。
彼らは、webmordから直接フラッシュできると言っていますが、何か問題があり、最終的にtftpでファームウェアをアップロードしました。 私は長い間、ルーターをock笑していましたが、彼は生き残りました。彼を殺すのは非常に困難です。 フラッシュファームウェアmpr-a1-32m-luci-usb-mjpg.bin
ファームウェアの名前としてMJPG-streamerはすでにインストールされています。 これは、ボットのオンボードWebカメラからビデオをブロードキャストするためのプログラムです。 完全なセットの場合、ser2netパッケージのみが欠落しています。 これは、TCPポートとルーターのシリアルポート間のブリッジとして機能するプログラムです。 このプログラムは、ボットに制御コマンドを送信すると、ルーターのシリアルポートを介してArduinoに転送します。 このプログラムでパッケージを見つけ、チェックして、 ここに残しました 。
mjpg-streamerは、Webカメラからビデオストリームを「ストリーミング」し、コマンドをルーターのポート2000に送信し、ser2netがそれらをArduineに送信します。
多くの人が、どのようにしてコマンドを任意のホストポート(ルーター、PC、またはその他のネットワークノード)に送信できるのでしょうか? このために、この種のプログラムを使用できます。 彼女はそれ以上のことができます。 何らかの理由で、そのようなソフトウェアを見つけるのは難しく、明らかに需要は大きくありません。
繰り返しますが、多くの人に質問があります-あなたがリンクの第一人者でない場合、ルーターにファイルを「置く」か、そこで編集する方法。 これには優れたWinSCPユーティリティがあり、Total Commanderの原理に基づいて機能します。
今回は、その速度とバグに悩まされているため、ボットのwebmordを作成しませんでしたが、将来はC#でアプリケーションを作成することを考えていますが、今のところ、VLCまたはブラウザー+管理用のHercules SETUPユーティリティーで取得できます。
私のルーターの個人設定は非常に重要ではなく、内部の「いぼ」の速度の設定のみに関係しています。それだけです。 さらに、ルーターがホームwifiネットワークのクライアントであるか、それ自体がアクセスポイントとして機能するように、ルーター自体を構成する必要があります。 ただし、これはすでにOpenWrt構成の問題に当てはまります。 すべてが直観的であり、問題がある場合は、このファームウェアのマニュアルを参照してください。
チューニング、便利ですが、必須ではありません。
「手動」介入なしでボットを機能させたいので、充電のためにドッキングステーションが必要です。 これもビジネスにとって非常に簡単です。 前回と同様に、microUSBケーブルを1本用意して、「口ひげ接触」にはんだ付けします。 再混合の可能性を排除するために、ダイオードを追加します。
実験的に、オンモードのルーターはまだ「充電済み」であることがわかりました。これはまさに必要なことです。 ドック自体は錫の2つのプレートで構成されており、電源を接続します。 あなたも完了することができます。 今回は、ルーター内にバッテリーの充放電ハーネスがあり、ルーターを充電するために入力に5Vを供給するだけなので、すべてがよりシンプルになります。
今後の計画。
以前のボットの動作中にも、不便な点が1つありました。駐車場でボットを手動で起動し、充電が開始されていることを確認する必要がありました。そうしないと、ボットが飢starで死亡した状況に陥る可能性があります
同様の問題に対処する方法について考えた後、ボット自体が充電する必要があるという結論に達しました。 アパートの信頼できるシンプルな全地球測位システムを思いついていなかったため、小さなものに限定することにしました-超音波距離計を設置し、ドッキングステーションの特徴的な形状を使用してボットを自動的に駐車するように訓練しました)
距離計は、障害物までの距離を「知る」ことができるセンサーです。 収束面の形でドッキングステーションを作成する場合、ボットを真ん中に乗せて充電するまで立ち上がることができます。 アルゴリズムは単純です。ボットをドッキングステーションの中央に手動でおよそ移動し、駐車を開始するコマンドを与えます。 ボットは、距離計を備えたスロットを周期的に「見つけ」、それに向かって歩きます。 各ステップの後、「口ひげ」に緊張があるかどうかをチェックし、緊張している場合は駐車します!
そのようなアイデアが興味深い場合は、すでにデバッグされた駐車場を含む追加の投稿を公開します。
そしていつものように、「ポカチュシキ」を使った小さなビデオ:
追伸 この記事は少し未完成であることが判明しましたが、最近の出来事(個人的およびグローバルな両方)に照らして、それがまったく完了しないか、予測可能な将来に確実に完了する可能性が高いため、現時点でそれを提示する方が良いと思いました。