無人車両がどのように機能するかについては、さまざまな見解があります。 たとえば、グーグルはセンサーとレーダーをそれらに詰め込み、マーキングと道路標識を認識します。 問題は、このアプローチが高すぎることです。たとえば、Googleのマシンには15万ドルの追加機器が搭載されています。各車を個別に変更するのではなく、安価な電子機器にとって理解できる新しいインフラストラクチャを作成する方が論理的でしょうか?
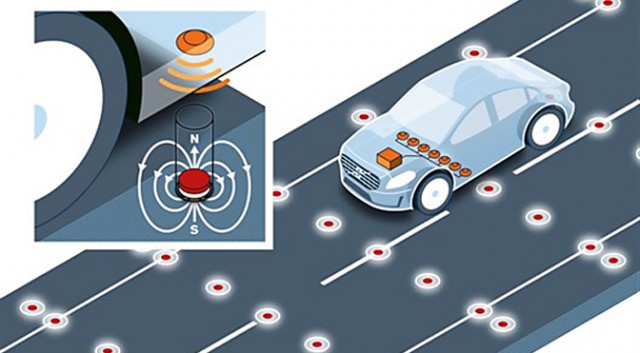
ボルボは根本的に新しいアプローチを提供します。 道路に磁石を組み込むことです。 この技術をテストするために、同社はハレド(スウェーデン)のレーストラックの100メートルセクションを磁石に装備し、特別に改造された無人S60セダンを発売しました。
この実験は、比較的シンプルで安価な磁気センサーでさえ、最高145 km / hの車速で道路の磁石を確実に検出できることを示しました(実験では、アスファルト表面から200 mmの深さで40x15 mmのフェライト磁石を使用しました)。
ボルボのエンジニアは、車線の中央で自信を持って走行するためには、マシンが毎秒400の磁気センサーの読み取り値を読み取る必要があるが、従来のセンサーは毎秒3つの読み取り値しか読み取れないと計算しました。 したがって、5つのモジュールを使用した実験が実験に使用され、各モジュールにはHoneywellセンサーを備えた15個のブロックが設置されました。 合わせて、彼らは毎秒500回の読み取りを行いました。

時速72 kmで、109ドル相当の安価なグリルが10 cmの精度で車を配置しました。
ボルボによると、アスファルト舗装段階でそのような磁石を追加すると、2車線道路のキロメートルあたりわずか24,405ドルの費用がかかります。 計算が正しければ、各車にマーキング認識システムをインストールするよりも収益性が高くなります。 特に、たとえばモルガン・スタンレーの専門家が年間5.6兆ドルと見積もる無人車両の導入による世界経済の全体的な利益を考慮しています。