
こんにちは、ハブロビテス。
ここで開発に関する記事を最後に書いてからかなりの時間が経ちましたが、それを修正する時が来ました。
この記事では、STM32F101マイクロコントローラー上に小さなロボットを組み立てて、メインクーンであるArthasを楽しませ、どのような問題に直面し、何が出てきたかについてお話します。
問題の背景と説明
半年前、私はこの黒いハンサムなメインクーンを手に入れました。このメインクーンは、コンピューターゲームの有名なヒーローに敬意を表してアーサスと名付けました。

猫は非常に遊び心があり、走るのが好きで、待ち伏せから攻撃し、犬のようにボールを持ってきます。 私は長い間何も集めていなかったので、猫用の小さなおもちゃを開発することにしました。
主な要件は次のとおりです。
- 猫の歯と爪、理想的には完全に密閉された体(ボール)からの構造の重要な部分の保護
- 前の段落から、デバイスの小さな寸法の要件に従います。 サッカーボールではなく、小さなボールであることが望ましいです。
- 携帯電話/タブレットおよびデスクトップコンピューターから制御する機能-車輪を再発明せず、モバイルデバイスとの互換性を確保するには、Bluetooth接続が理想的です。
- それをもっと面白くするために、将来的にはロボットを多かれ少なかれ自律的にすることができる、少なくとも何らかの種類のセンサーを持つことが望ましく、単なるラジコンマシンではありません。
- コテの注意を引くために音を引き出す方法がある。
すぐに、起こったことの短いビデオをデモンストレーションします。猫ボットはテストモードで実行されています(コンピューターから制御されます)。
猫ボットは外殻なしでテストされ、猫を引き付ける音を出し、逃げられません ドライブの1つが故障します。
(記事の最後にこれについての詳細)
猫ボットアセンブリ
猫はロボットにあまり積極的に反応しないように思えるかもしれませんが、実際には、テスト中に、彼はすでに100回それをつかんで、それを持ち去って、つまみました。 もちろん、私はロボットを選択しました(終了するまで)ので、猫は床にいるロボットを見ながら、攻撃してすぐに連れ去られないようにしばらく待つことにしました)
次に、開発プロセス自体について説明します。
開発:要素の選択と準備
本体
提案された設計を決定したので、私は2つの半分から成るプラスチックボールのペアを購入しました-1つは直径60 mm、もう1つは80 mm、最初のものが収まらない場合に備えて。 このような寸法により、エンジンとセンサーの選択が大幅に制限されました(たとえば、超音波センサーを忘れてしまい、ボールに収まらず、さらに密閉された空間では機能しないという意味で)。

マイクロコントローラー
「目」を見落とした後、ボールは身体の役割の理想的な候補になりました。 サイズが限られているため、最も小型のケース、つまりほとんどの場合QFNを使用して回路全体を設計することが決定されました。
STM32F101は、36 MHzで動作でき、64 KBのフラッシュと16 KBのRAMを備え、最も重要なのは、6x6 mm QFNで利用できる一方で、ストリップダウンされたM0ではなくCortex M3コアに基づくマイクロコントローラーであるため、中央プロセッサとして選択されました軍団
センサー
センサーとして、同じSTの3軸加速度計LIS331DLが選択されましたが、Terraelectronicsの割引があったため、1個あたり約30ルーブルの価格で入手できました。
加速度計は3x3 mmのQFNケースで使用でき、I2Cバスで通信できます。これは、限られた寸法の条件で非常に便利です。 加速度計を使用すると、3軸に沿ったロボットの傾きを差し引くことができます。また、(加速度を変更することにより)ロボットが動いているのか、障害物にぶつかっているかについての情報を取得しようとすることができます。 さて、そしてもちろん、猫がきしむために彼を蹴る瞬間を決定します-このようにして猫はそれを生きているものと見なします)
コミュニケーション
コミュニケーションの手段として、もちろん、実績のある安価で小型の中国語HC-05モジュールを使用します
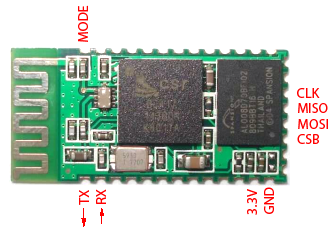
これは、ロボットで唯一の既製のモジュールです。
音源
当初は小さなスピーカーを使用したかったのですが、残念なことに、小さなスピーカーでも非常に大きなものでした。 さらに、彼らは多くを消費し、PWMでスイングするために、少なくともトランジスタとフィルターを必要としました。 一定量のグーグルの後、私はそのような面白い圧電キーキーを見つけました:

Murata PKLCS1212E4001の価格は48ルーブルで、寸法は11x11 mm(ボード上で最大の要素です!)であり、標準的なピエゾサウンダーです。圧電効果で膜が曲がることにより音を出すデバイスです。 そしてこれは、同じ音量でスピーカーがきしむよりも消費電流が桁違いに少ないことを意味します。
しかし、スピーカーとは異なり、非常に巧妙で不均一な周波数応答を持っているため、きしむ方法を知っておくことが最善です。 そして最も大きなことは、彼女が4KHzの周波数でこれを行うことができるということです(しかし、これはあなたが他の人にきしむことができないことを意味しません!)
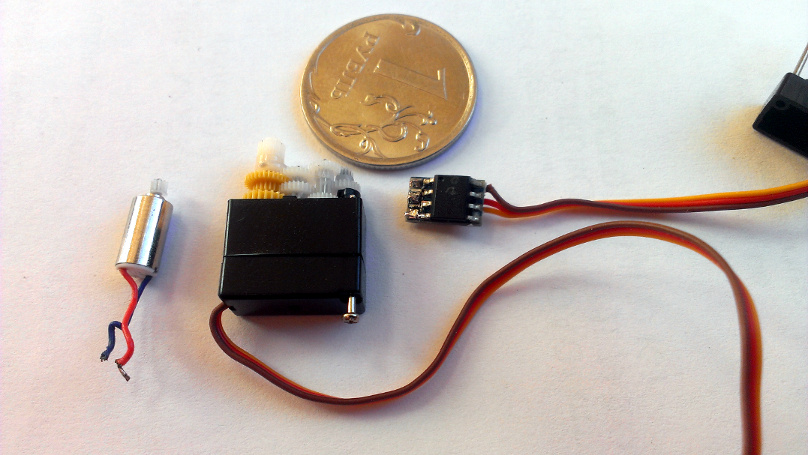
ドライブ
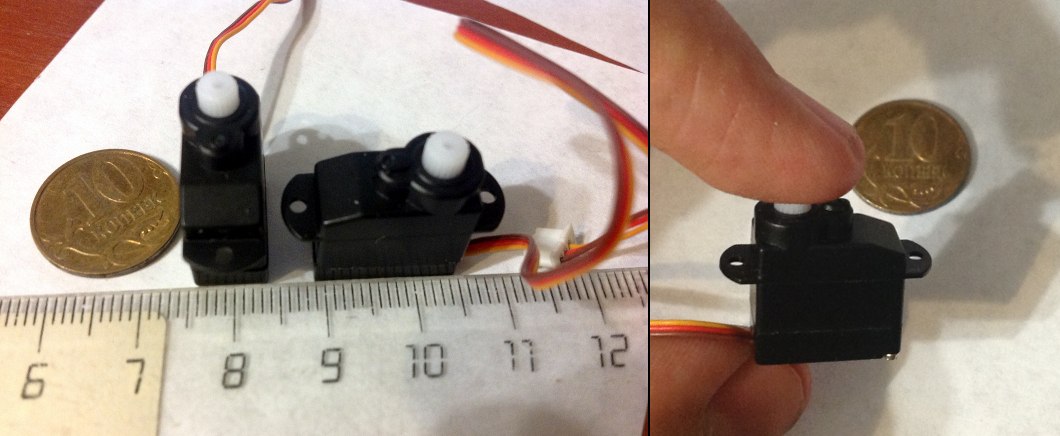
最も重要な要素は、ロボットを動かすドライブです。 残念ながら、私たちが望むほどすべてがスムーズではなかった。これについては記事の最後で詳しく説明します。 ドライブとして、私は見つけることができる最小のサーボを取り、一定の回転のためにそれらを作り直すことにしました。
私が選んだのは、サーブを取ることで、15x20x8 mm程度の場合にモーター+ギアボックス+制御ボードが手に入るという事実によるものです。 すべての欲求で、私はそのような寸法のギアモーターを見つけることができませんでした。
その結果、187 マイクロルーブルの価格で、 サブマイクロサーボが選択されました。
栄養
すべての要素が選択され、システムに電力を供給する方法と方法を決定します。 明らかに、最も小さく最適なソースは、小型のリチウムポリマーバッテリーです。 ドライブには4.8Vが必要なため、MAXIM Semiconductorsの小型DC-DCコンバーターを使用して電圧を5Vに上げます。 MAX8815は3x3mmケースの優れたチップであり、97%の効率の負荷で最大1Aを転送することができます(もちろん、プリント回路基板の正しいレイアウト、動作モード、およびストラップの選択に常に依存します)。
ドライブは、ピーク時でも合計で600 mAしか消費しないため、これで十分です。
残りの電子機器に電力を供給し、モーターによる干渉から保護するために、DC-DCブーストコンバーターの後、固定3.3V出力のTIの小型リニアレギュレーターLP2985を配置します。
回路と少しの構造
まず、ロボットの設計に関するいくつかの言葉。 寸法とコストを最小限に抑えるために、構造要素としてプリント回路基板を使用することにしました。 つまり、ドライブは、ネジで固定された2つのプリント回路基板の間に固定されています。 アセンブリ(およびボードのデバッグ修正後、後ほど)では、すべて次のようになります。

ドライブが外に出ないようにするために、ボードとその表面の間に素晴らしい素材を入れました-Torresエキスパンダーからのラテックス

実際のところ、中国でパチンコを買ったことがあります。 ホーン自体はチタン合金で作られた非常に快適でしたが、ゴムは地獄ではありませんでした。 インターネットでは、パチンコの専門家は、すぐにそれを捨てて、この同じエキスパンダーを購入し、それからハーネスを切り取って交換することを勧めました。 結果は私の期待をすべて上回り、パチンコは非常に強力になりました。 そして以来 エキスパンダーは大きなもので、素材の大部分は手付かずのままで、引き出しの中に横たわり、翼で待っていました。
ドライブとボードの間のガスケットとしてこのラテックスを使用した後、ドライブは手袋のように立ち、ミリメートル移動しませんでした。
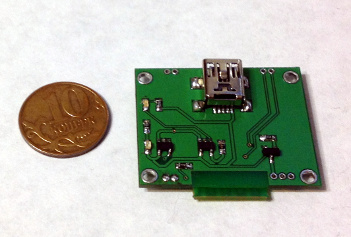
したがって、このような設計を実装するには、すべてのコンポーネントが外側に集中している2つのボードが必要です。
使用可能な領域が急激に増加しているため、下側のボードにバッテリー充電器、ミニUSBコネクタ、充電を示すLEDを配置し、同時にBTモジュールを配置して、バッテリーがそれを覆わず、通信を妨げないようにします。
したがって、TOPとBOTTOMの2つのプリント回路基板が開発されました。 一番下は既に言ったことで、一番上はロボットの消化器系、つまりマイクロコントローラー、加速度計、コンバーター、電源ハーネス、そしてもちろんピエゾツィーターです。
天板のレイアウトは次のようになります。
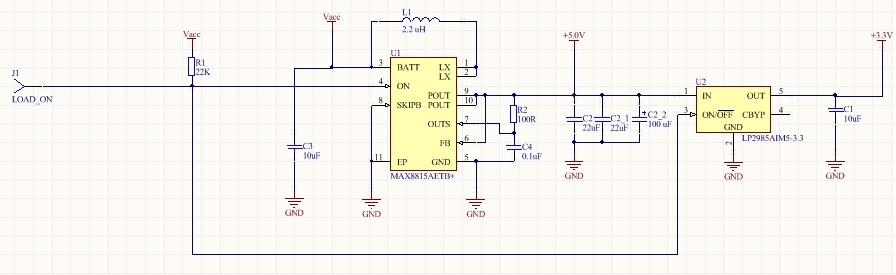
電源スキーム
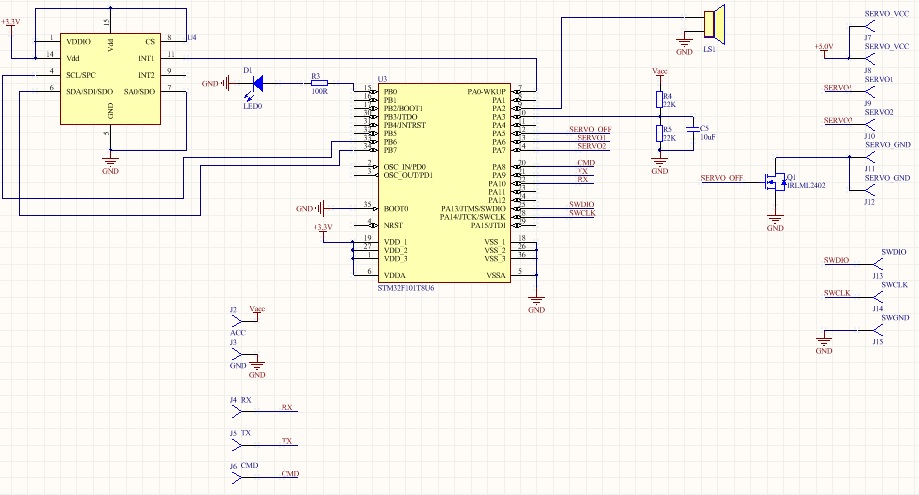
脳
USBが不要な5ボルトを駆動しないように、コンバーターU1とレギュレーターU2のON入力を接続し、電源にプルアップし、ボードの端のピンJ1に接続します-そこにGNDレベルを供給すると、コンバーターの入力と出力が高インピーダンス状態になり、本質的に回路が破壊されますUSB電流を本来あるべき場所に流します-バッテリー充電回路へ。 コンバータの接続図の残りの部分は、データシートからの典型的なものです。
U4加速度計は、プルアップ抵抗なしでコントローラーのI2Cバスに接続されています-はい、バスが動作するために必要ですが、データシートでは、両方のラインがLIS331DL内に埋め込まれたプルアップ抵抗を介してVdd_IOに接続されていると述べています 奇妙なことに、それらに関する情報はもうありませんが、私はまだ値を認識していませんでした(そして、オフになっていると、トランジスタによってバスから切断されているようです)。 だから私は盲目的にデータシートに頼らざるを得なかった。 私は言わなければならない、私はこれを失いませんでした-加速度計は実際に追加の抵抗なしで完全に動作します。
ただし、別の主要な要因が関連していたため、テストとFAXのセクションで確認できます。
加速度計に加えて、猫の注意を視覚的に惹きつけて指示ツールとして機能するように設計されたD1 LEDがコントローラーに接続されているほか、平滑コンデンサーC5を介してコントローラーのADCの入力に接続されている抵抗器R4およびR5の分圧器もあります。 この分圧器は、ADCが測定できる範囲にバッテリー電圧をもたらし、バッテリーレベルを判断する機会を与えます。
ちなみに、これらの抵抗器にはミニFAXが接続されていました。 実際には、古いモデルのように、コントローラーに統合された基準電圧(約1.2ボルト)があると仮定しました。 しかし、判明したように、QFN36パッケージのモデルには組み込みソースがなく、ケース内のREF入力は電源電圧(3.3V)に近いため、4.2Vアキュムレータで1Vを与える抵抗を3Vを与える抵抗に変更する必要がありました。
LS1スキーカーは、そのピエゾエッセンスにより、コントローラーピンに直接接続できます。その消費は非常に小さく、共振周波数でのインピーダンスは数百オームです。 唯一の潜在的な問題は、反対方向に機能すること、つまり、変形中に応力が発生する可能性があることです(衝撃)。通常、保護ダイオードまたは抵抗が取り付けられています。 しかし、実験の結果によると、平均力の衝撃時の電圧は、コントローラの保護出力ダイオードが処理できる1.5Vを超えていなかったので、余分な保護をかけないように挑戦しました。
コントローラーの組み込みPWMジェネレーターからの出力は、ドライブを制御するためにピンJ8およびJ9に出力されます。 非アクティブな消費を削減するための追加の(そして不要なものではない)対策として、GNDドライブが接続されている接点J11およびJ12は、パワートランジスタQ1によってグランドから切り離されています-ゲートに高レベルを供給すると、ドライブにグランド電力が与えられ、電流が内部を流れます。 判明したように、ゼロPWM信号であっても、ドライブの制御回路は依然として何らかの電圧をドライブに供給し、完全に切断されたものと比較して消費電力は10 mA増加します。
重要なポイントは、デバッグインターフェイスの選択です。 もちろん、寸法が非常に限られている状況では、最小限のワイヤでやりたいと思っていました。 しかし、いくらの情報は最小限の矛盾でした。 思慮深いグーグルと実験の後、私はSWDインターフェイスに落ち着き、ピンSWDIOとSWCLKのみを表示しました。 これに関連する別のファクトアップがあります。これについては、「テストとファクトアップ」セクションで説明しています。 しかし、要するに、はい、これらの2つのピンはほとんどの場合デバッグに本当に十分です。
底板は非常に簡単に配置されています。
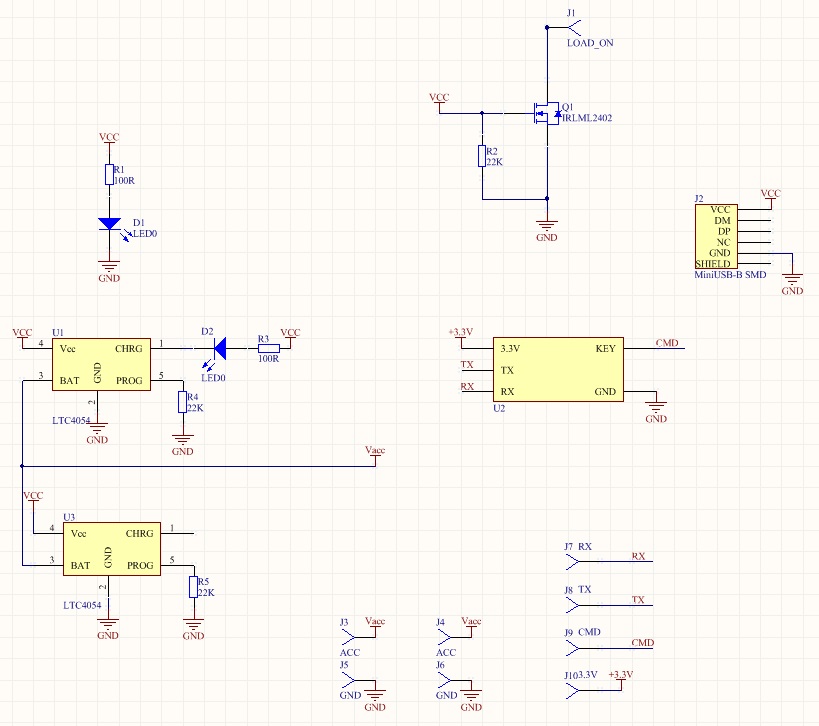
底板
Li-Pol(Li-Ion)バッテリー用の2つの並列線形充電チップ、Linear TechnologyのLTC4054が含まれています。 これは、単セルリチウムポリマーとリチウムイオンを充電する最も簡単な方法です。かなり低い効率(超小型回路が線形であるため)がひどくないかどうかはわかります。
それらは完全に平行に並んでおり、いくつかの中国の計画では、最大4つの類似したmikruhiを並列に見て、大きな充電電流を提供しました。 個別に、それぞれ最大800 mAを出力できますが、これは目玉焼きを揚げたい場合のみです。 負荷が500 mAを超え、バッテリーが完全に放電すると、マイクロ回路が温まり始め、指を保持することができなくなります。 なぜなら 温度保護回路が組み込まれていますが、これは原則として怖いものではありません。120度まで暖まると自動的に負荷電流が下がります。 しかし、これはあまり快適ではないので、許可された場所の利益のために、2つのピースを置くことを好みました。 充電電流は、2つで約500 mA(つまり、それぞれ250 mA)になるように私が選択した抵抗R4とR5によって設定され、そこでは加熱されません。
さらに、このボードにはミニUSBコネクタ(J2)、Q1トランジスタがあり、USBが接続されている場合、トップボードの電源回路のON入力をグランドにプルし、Bluetooth通信モジュールを備えています。
Resoniteでカードを注文しましたが、予算内で出てきました。2枚のマザーボードカードが搭載された6種類のボードのパネルに2000r未満で支払いました。
上下のボードは32x26 mmです。 組み立て後(および修正の修正前)、トップボードは次のようになります。

そして、一番下は次のようなものです。
テストファームウェアを作成します。
ファームウェアのテスト
FreeRTOSに基づいて最終的なファームウェアを作成する予定です(通常のマルチタスク、ブロッキングキューなどの実装に時間を無駄にしないように)が、テストのために、すべての周辺機器を初期化し、コンピューターからの簡単なコマンドで管理できる小さなファームウェアをスケッチしました。 初期化を見てみましょう。
クロッキングとGPIO
コード
void InitRCC() { RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOB, ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1, ENABLE); RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2|RCC_APB1Periph_TIM3,ENABLE); RCC_APB1PeriphClockCmd(RCC_APB1Periph_I2C1,ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE); } void InitGPIO() { GPIO_InitTypeDef GPIO_InitStructure; //LED GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; GPIO_Init(GPIOB, &GPIO_InitStructure); //ADC GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3; GPIO_Init(GPIOA, &GPIO_InitStructure); //Buzzer GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; GPIO_Init(GPIOA, &GPIO_InitStructure); GPIO_WriteBit(GPIOA, GPIO_Pin_2, Bit_RESET); //Servo GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7; GPIO_Init(GPIOA, &GPIO_InitStructure); //Servo On/Off GPIO_WriteBit(GPIOA, GPIO_Pin_5, Bit_RESET); GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; GPIO_Init(GPIOA, &GPIO_InitStructure); //Accel GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD; GPIO_Init(GPIOB, &GPIO_InitStructure); //UART & BT Control GPIO_WriteBit(GPIOA, GPIO_Pin_8, Bit_RESET); GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8; GPIO_Init(GPIOA, &GPIO_InitStructure); GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; GPIO_Init(GPIOA, &GPIO_InitStructure); GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; GPIO_Init(GPIOA, &GPIO_InitStructure); }
ここではすべてが簡単です-必要なすべての周辺機器、つまり入出力ポート、ADC、UART、2つのタイマー(ツイーター用、PWMドライブ用)およびI2Cにクロックを供給します。 次に、すべてのGPIOを構成します。
スクイーカー
コード
void InitBuzzer() { TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; TIM_OCInitTypeDef TIM_OCInitStructure; TIM_TimeBaseStructure.TIM_Period = 4; TIM_TimeBaseStructure.TIM_Prescaler = 1800; TIM_TimeBaseStructure.TIM_ClockDivision = 0; TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure); TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; TIM_OCInitStructure.TIM_Pulse = 0; TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; TIM_OC3Init(TIM2, &TIM_OCInitStructure); TIM_OC3PreloadConfig(TIM2, TIM_OCPreload_Enable); TIM_ARRPreloadConfig(TIM2, ENABLE); TIM_Cmd(TIM2, ENABLE); }
セットアップは、出力がビープ音に接続されているタイマーを初期化することに要約されます。 PWMを調整しますが、実際には、パルス幅を変更せず、常に50%に設定します。 代わりに、分周器を変更して、タイマーにパルスの周波数を変更させ、異なるトーンできしみ音を鳴らします。
システム周波数は36 MHzなので、周期を4に設定し(すべて同じで、大量のPWM放電は必要ありません)、スプリッター1800は4 KHzの周波数を受信しました。
ドライブ
コード
void InitServo() { TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; TIM_OCInitTypeDef TIM_OCInitStructure; TIM_TimeBaseStructure.TIM_Period = 0xFFF; TIM_TimeBaseStructure.TIM_Prescaler = 0xB0; TIM_TimeBaseStructure.TIM_ClockDivision = 0; TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; TIM_OCInitStructure.TIM_Pulse = 0; TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; TIM_OC1Init(TIM3, &TIM_OCInitStructure); TIM_OC2Init(TIM3, &TIM_OCInitStructure); TIM_OC1PreloadConfig(TIM3, TIM_OCPreload_Enable); TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); TIM_ARRPreloadConfig(TIM3, ENABLE); TIM_Cmd(TIM3, ENABLE); }
スクイーカーと同じことをしますが、駆動に必要なパラメーター、つまり約50 Hzの周波数、および速度を非常に正確に制御するために十分な数の放電を使用して、PWMの出力で既にシャープにします。 したがって、プリセレクターは176に設定され、周期は4096です。これにより、約50 Hzと12 PWMビットが得られます。
加速度計とBluetooth
コード
void InitAccel() { I2C_InitTypeDef I2C_InitStructure; I2C_InitStructure.I2C_Mode = I2C_Mode_I2C; I2C_InitStructure.I2C_DutyCycle = I2C_DutyCycle_2; I2C_InitStructure.I2C_OwnAddress1 = 0x00; I2C_InitStructure.I2C_Ack = I2C_Ack_Enable; I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit; I2C_InitStructure.I2C_ClockSpeed = 200000; I2C_Init(I2C1, &I2C_InitStructure); I2C_Cmd(I2C1, ENABLE); } void InitBT() { USART_InitTypeDef USART_InitStructure; NVIC_InitTypeDef NVIC_InitStructure; USART_InitStructure.USART_BaudRate = 9600; USART_InitStructure.USART_WordLength = USART_WordLength_8b; USART_InitStructure.USART_StopBits = USART_StopBits_1; USART_InitStructure.USART_Parity = USART_Parity_No; USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; USART_Init(USART1, &USART_InitStructure); USART_Cmd(USART1, ENABLE); USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure); }
ここではすべてが簡単です-加速度計については、200KHzの速度でI2Cをオンにするだけです(アクセラレータはだいたい使用可能ですが)。Bluetoothは通常のUARTであり、標準9600をオンにし、同時にコマンドを処理する受信割り込みを設定します。
次に、UART割り込み処理コードを記述します。 もちろん、これは最も成功しているわけではなく、チェックサムをチェックすることさえ害になりませんが、テストには役立ちます。 チームのキューで時間を無駄にしないために、1つのチームに等しくします。これは、コントローラーにチームを投げることができる頻度にのみ影響し、彼がチームを見逃すことを恐れません。
コマンド受信コード
コード
#define OPCODE 0 #define LENGTH 1 #define PAYLOAD 2 enum CommandStates {CS_DONE, CS_RECEIVING, CS_EXECUTING}; enum CommandCodes {CC_TEST=0x01, CC_SERVO_STATE, CC_SET_SERVO1_DS, CC_SET_SERVO2_DS, CC_GET_ACCEL_REG, CC_SET_ACCEL_REG, CC_GET_BATTERY, CC_LED_STATE, CC_BUZZER, CC_INVALID}; enum ErrorCodes {EC_NONE, EC_INVALID_CMD, EC_MAX_LEN_EXCEEDED}; enum ReplyCodes {RC_NONE, RC_EXECUTED, RC_TEST, RC_ACCELREG, RC_ERROR}; typedef struct { unsigned char Command; unsigned char State; unsigned char Length; unsigned char Payload[CMD_BUFFER_LEN]; }CommandDescriptor; CommandDescriptor Cmd; void InitCmd(CommandDescriptor *Comm) { Comm->Command=0; Comm->Length=0; unsigned char i; for(i=0;i<CMD_BUFFER_LEN;i++) Comm->Payload[i]=0; Comm->State=CS_DONE; //Init state at the end, to prevent interrupt from interfering } void SetInvalidCmd(CommandDescriptor *Comm, unsigned char ErrorCode) { Comm->Command=CC_INVALID; Comm->Length=3; Comm->State=CS_EXECUTING; //Just send back error Comm->Payload[0]=ErrorCode; } void USART1_IRQHandler(void) { char data; if ((USART1->SR & USART_FLAG_RXNE) != (u16)RESET) { data = USART_ReceiveData(USART1); switch(Cmd.State) { case CS_DONE: if(data>=CC_INVALID) { SetInvalidCmd(&Cmd, EC_INVALID_CMD); return; } Cmd.Command=data; Cmd.Length=0; Cmd.State=CS_RECEIVING; return; case CS_RECEIVING: if(Cmd.Length==0) { if(data>CMD_BUFFER_LEN) { SetInvalidCmd(&Cmd, EC_MAX_LEN_EXCEEDED); return; } Cmd.Length=data; BufPtr=0; return; } if(BufPtr<Cmd.Length-2) //Including opcode and length fields { Cmd.Payload[BufPtr]=data; BufPtr++; } if(BufPtr>=Cmd.Length-2) { Cmd.State=CS_EXECUTING; return; } case CS_EXECUTING: return; } } }
まず、コマンドの構造を発表します。実際には、コマンド自体、状態(実行中、受信中、処理中)、パケット長(既にリストされている2つのフィールドを含む)、およびペイロード(0〜8バイト)で構成されます。 。
この構造を初期化するためのヘルパー関数と、無効なコマンド値を入力するためのもう1つの関数について説明します。
次に、割り込みについて説明します。 UARTで1バイトを受信すると、現在のコマンド(「キュー」内の同じコマンド)で何が起こるかがわかります-
そのステータスが実行が完了したことを示している場合、正しいオペコードを受信したかどうかを確認し、そうでない場合はエラーを報告します。そうであれば、新しいコマンドを受信し始め、 CS_RECEIVINGに設定します 。
受信中の場合は、10バイト(ヘッダーとペイロードの2バイト)とヘッダーの2番目のバイトで宣言された長さを超えないように、取得する長さを制御します。 何かが間違っている場合-エラーを報告し、そうでない場合-コマンドを受信し、 CS_EXECUTING状態になったと言います。 これ以降、誰かがこのコマンドにCS_DONE状態を設定するまで、私たちに来るすべてを無視します。
実際のラインナップがあれば、受け取ったコマンドをその中に投げ込み、今のところ以下を受け入れることができます。
実際、それはすべてです-ファームウェアの主な機能は、単に周辺機器を初期化し、Bluetoothをオンにして、コマンドのステータスがCS_EXECUTINGになるまで待機します。 その後、彼女はコマンドを処理し(このコードは渡さず 、ペイロードからレジスターへのバイトのオペコードに大きなスイッチがあります)、 CS_DONEステータスをそれに設定します。
void main()
コード
int main(void) { InitCmd(&Cmd); InitHardware(); DisableServos(); EnableBT(); EnableLED(); while(1) { if(Cmd.State==CS_EXECUTING) { ProcessCmd(&Cmd); InitCmd(&Cmd); } } }
一定の回転と設計の問題のためのドライブの変更
ドライブはもともと170度の範囲内で回転するように設計されていたため、ロボットエンジンとして使用するにはわずかにアップグレードする必要があります。 サイズが小さいため、これは最初はそれほど単純ではないかもしれません。
一般に、すべてのドライブはサイズに関係なく同じように構築されます-モーター、ギアボックスがあり、その出力軸は可変抵抗器と同じ軸上にあり、制御回路はシャフトの現在位置に関する情報を削除します。
抵抗は、電源とグランドの間の分割器として含まれています。 出力軸のギアの1つにストッパーがあります。これにより、サーボが必要以上に回転できなくなり、ポテンショメーター自体がそのようなストッパーとして機能します。 具体的には、これらのドライブではすべてが非常に簡単です-ストッパーは出力シャフトの成長物であり、十分に大きいため、切断するのではなく、ドライブカバー内の突起を切断するのが簡単です
この突起ははんだごてで簡単に溶けるので、主なことは回転を妨げるプラスチック片が残っていないことを確認することです。
ポテンショメータシャフトには、出力シャフトのギアで回転しないため、端に小さな切り込みがあります。 ちなみに、このギアが入る小さな窪みにあります。 したがって、この切断の痕跡がなくなるまで、はんだごてで単純に切断/融着します。 すべて、ギアは可変抵抗器に触れることなく静かに回転します。
さらにすべてに注油してください。 中国のスティンググリース、トップカバーを閉じます。 残りはほとんどありません。
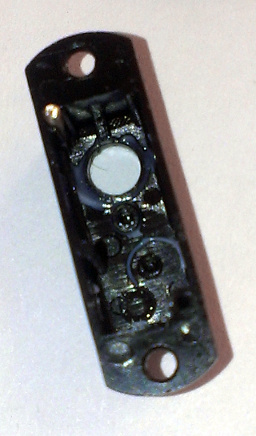
底部カバーを開けると、モーターとポテンショメーターに接続された制御回路が見えます。

ポテンショメータからワイヤを無慈悲に切断し、干渉しないようにサーボから取り外します。 彼らが行ったコンタクトパッドに、2KOのSMD抵抗をはんだ付けし、合計抵抗を5KOhm程度にします(少しでも少しでも-怖くない)、一定のディバイダーを形成します。 2.4Kで2個をはんだ付けしました。
モーターは相互に鏡像関係にあるため、モーターの1つはモーターに向かうワイヤも交換します。 もちろん、このソフトウェアを実行できますが、より快適なアイロンです。
これで、サーバーは常にシャフトがちょうど真ん中にあると見なします。 そして、デューティサイクルが平均よりも大きいPWM信号を与えると、出力シャフトは一方の方向に回転し始め、もう一方の方向に回転し始めます。 そして、供給された値が平均からより強いほど、シャフトはより速く回転します。
テストとファクアップ

顧客がプロトタイプデバイスをテストする
上記のデバイスのビデオと写真をすでに示したので、このセクションでは主に、踏んだレーキのテキストによる説明を含みます。 それらのいくつかは私のせいで発生し、いくつかは私に依存しませんでした。
ファックス駆動
スキームで最も改善された最初の事実。 ブーストコンバーターと接続されています。 デバイスを最初に起動したとき(これまでのところドライブなし)、何も気付かず、コントローラーが巻き上げられて点滅しました。 5Bはコンバーターの出力にありました。 ドライブをチェックする時が来ました。ここで熊手が出ました。 ドライブが接続されると、コンバーターは即座に切断されました-内蔵保護がトリガーされ、出力電圧が指定値(5V)を10%以上下回ると、マイクロ回路が無効になります。 デバッグには、オシロスコープに座ったり、コンバーターチップ自体を同様のものに交換したり、異なるチョークをテストしたりするなど、非常に長い時間がかかりました。
興味深いことに、ドライブの近くにある容量でさえも助けにはならなかったので、問題はボードの配線またはスロットルにあると判断しました。 測定により、負荷が90 mAを超えると、純粋な抵抗負荷の場合でも、コンバータは動作を停止することが示されました。 さらに、効率は約40パーセントでした。もちろん、インパルスコンバーターの場合、これは受け入れられません。
その理由は非常に平凡であることが判明しました-10μFの出力セラミックコンデンサの代わりに、1μFで誤って同じものをはんだ付けしたようです。 このような出力容量では、マイクロ回路はモードに入ることができず、ノズルに取り付けられた大きなコンデンサは彼女をまったく助けませんでした。
ボードをマスクから軽く洗浄した後、2つの22マイクロファラッドのセラミックコンデンサをコンバーターの出力、その入力、およびサーバーの正面にはんだ付けしました。
同時に、2A用に設計されたコンバータ出力とサーボBLM41PG471SN1の間に平滑インダクタ(より正確にはフェライトビーズ)を取り付けました。
さらに、ボード上の場所から、コンバーター出力のすぐ隣にある150マイクロファラッドで、「A」ケースに1つのタンタルコンデンサーを押し込むことができます。
実際、正常に動作するには、出力に1個、入力に1個の22マイクロファラッドコンデンサで十分ですが、場所が許されたので、安全にプレイすることにしました。
結果は単純に優れており、負荷がかかっていても5V出力はほとんどノイズが多く、測定値(入力および出力回路に電流計を含めた)によるコンバーターの効率は93パーセントに達し、それ自体が非常に良い指標です。
まとめからの結論:ボードにはんだ付けする要素を確認します。 パルスコンバーターは敏感で、思考の方向(出力容量が不十分)が正しい場合でも、ノズルに取り付けられたコンポーネントは状況を改善しません。
プローブの抵抗とマルチメーターのシャント、モックアップの静電容量とインダクタンスは画像を歪めるため、鼻ではなく最終構成でそのようなことをテストする必要があります。
加速度計によるファックスアップ
不注意によるHe核の偽装。 周辺機器をテストすると、加速度計が応答しないことが判明しました。 なぜなら 彼はI2Cバスに座って、デバイスアドレスの送信で通信を開始します(開始パルスはカウントしません)。 その後、アドレスが一致する場合、確認パルスで応答する必要があります。 衝動はありませんでした。
加速度計のケースははんだ付けに最も悪かったので(3x3 mmで、マイクロサーキットに「アース」プラットフォームはありませんでしたが、それはうんざりするほど中心にあったため)、はんだ付けに問題があると判断し、何度もはんだ付けしました。 助けにはなりませんでした
その後、約束された内蔵抵抗器では不十分であると判断し、ボードを洗浄して鉱山をはんだ付けしました。 助けにはなりませんでした
コードを何度も確認し、データシートで住所を確認しました。 助けにはなりませんでした
その結果、ある奇跡によって、彼は1つずつ(アドレスのバイナリ表現のビットの1つで)セットとは異なるアドレスを与えました。 助けた。
デバイスが別のアドレスに応答するために、これが不可能なため、データシートを掘り始めました。 そして素晴らしいことを見つけました。
加速度計には、 LIS331DLとLIS331DLHの 2つの変更があります。
同じ住宅。 同一のデータシート。 同じレジスタマップ。 単純な2秒目では2g / 4g / 8gではなく、最初の2g / 4gしか測定できません。
そして、それらのアドレスは1つ異なります。 良いGoogle、LIS133を入力し始めたとき、自動的に "LIS133DLH"に促されましたが、すぐにデータシートの違いが見えなかったので、他の人の住所でアクセルを非難しました。
fac-upからの結論:データシートの要素名を確認してください 予想されるものと少なくとも1文字異なる場合は、この文字の原因を確認してください。 ほとんどの場合、末尾の文字は開発にとって重要ではなく、コンポーネントの配信の種類に関連していますが、この加速度計でも発生します。
Bluetoothモジュールを使用したファックスアップ
よく、このphak-upは中国人の良心により多くあります。 HC-04、HC-05、HC-06、このモジュールのいくつかの変更を生成することが判明しました-それらは鉄が異ならず、ファームウェアが異なります。 必要に応じて、別のものを変更できます。
HC-04はHC-05の代わりに私に来ました。04のほうがファームウェアが簡単で、05がGPIOの1つに信号を適用することでコマンドモードに切り替えられ、05がマスターまたはスレーブとして機能できる場合、04は常に異なります。スレーブとしてのみ機能します(またはマスターとしてのみ機能しますが、販売中のモジュールはまだ見ていません)。最初はコマンドを受信するモードであり、マスターとの通信を確立した後、コマンドへの応答を停止します。
さらに、これらのモジュールはいずれもエネルギー効率の高いスリープをサポートしていません。
したがって、モジュールをコマンドモードにするために私から持ってきた信号は役に立たず、また、マスターを探している間、モジュールは常に20〜40 mAを消費していることがわかりました。
解決策は、この状況では役に立たない制御信号をRESETモジュールのピンに投げることでした。 ここで、低レベルがそこに適用されると、モジュールはRESET状態になり、消費を停止します。
まとめからの結論:東洋は微妙な問題です。 中国のモジュールは宝くじです。データシートを注意深く読み、それらがあなたに送信するものも確認してください。
デバッグインターフェイスを使用したFAXアップ
その事実ではなく、検討のための情報。 はい、ファームウェアとデバッグには、実際には2つのSWD信号ピン(クロックとデータ)で十分です。 ただし、 VAPPプログラマピンがコントローラーの電源に直接接続されていない場合は、まったく方法がありません(いずれの場合もST-LINK)。 プログラマーは彼らのために電圧をテストしますが、一般的に彼にはやさしいです。何らかの理由で、それを3.3Vの電源に閉じても機能しませんでした。 ただし、これはそれほど怖いものではありません。スムージングコンダーの1つにはんだ付けされています。
他よりもはるかに悪い。 もちろん、コントローラーのリセットを担当するNRSTピンがあります。 実際、SWDはコントローラーソフトウェアをリセットできるため、原則として、接続することはできません。 しかし。
スリープモードをテストすると、すくいが忍び寄ってきました。 残念ながら、 低電力モードのデバッグサポートセクションであるCTM32 refmanからこれらの重要な用語を読みませんでした。デバッグセッション中にコアでFCLKまたはHCLKをオフにすることはできません。 これらはデバッガー接続に必要なので、デバッグ中はアクティブのままにしておく必要があります。
最も深いスリープ、スタンバイモードでは、デバッグと共にタイミングが無効になります。 そして以来 消費テストのために、メインのスタンバイへの入り口に入ったところ、最後に非縫製コントローラーを入手しました。
rezetとこの事実の間の接続は簡単です-スタンバイがまだアクティブになっていないときにプログラマーはrezetの下から縫うことができます(そして、ファームウェアでオンにするとすぐにアクティブになります)、これのためにのみ、 NRSTピンなしでコントローラーを再起動できます彼はできませんでした。
奇妙に思えるかもしれませんが、プログラマーが絶えずプログラマブルコントローラーを検出しようとする壮大な自動モードがあったSTの標準ユーティリティは私を救ってくれました。 このモードをオンにして、GNDを針にはんだ付けして配線を開始し、コントローラーの下からかろうじて突き出ている切断領域を突くようにしました。 プログラマーがコントローラーを拾い上げてから再び眠りに落ち、ファームウェアを消去することができました。
まとめからの結論:眠って、どうやって目覚めるかを考えてください。 まあ、あなたは針を刺すことさえできるように、少なくとも体から1ミリメートル離れたカットを表示する必要があります。
ドライブでFAXを送信
最も悲しい事実であり、それは私の良心ではありません。 ドライブ、申し訳ありませんが、たわごと。 サーボモード専用に設計されているため、ほとんどの時間を静的な位置で過ごすことができます。 負荷がかかると、彼らは容赦なく浴します。 さらに、何も取り付けられていなくても加熱され、シャフトが回転するだけです。 そのため、一定回転モードでは動作しません。2分後、速度が低下し、内部の潤滑性が優れていても(スティックがなく、ストロークがスムーズ)、自然に溶け始めます。

体が溶け、そして何より最悪なのはギア、特に出力です。 その後、ドライブがくさび状になり、交換のみが役立ちます。 そのため、写真とビデオに表示されている形式の猫ボットは、中断されて1〜2分間しか機能しません。 そのため、私はそれを分解し、ドライブを、より長く、ゆっくりと回転する金属ギアを備えた、より健康的で、より遅く、よりガズリングするMG90に交換しなければなりませんでした。
そのため、彼はボールに収まらず(小さなボールはもちろん大きなボールにも)、非常にゆっくりと走ります。
しかし、コツはまだ面白いです。
事実からの結論:さて、どのような結論が得られるのか、それはテストサンプルであり、そのようなことを明らかにするだけです。 ドライブに関する結論-小さなドライブは細心の注意を払って使用してください。おそらく彼らは超軽量で超微細な六角形または四足動物を引っ張るでしょう、私は時間があるときにそれを集めようとします。
作業に関する一般的な結論:一般的に、経験は役に立ちます。そして、猫は、新しいボットがキャットボットのサイズと速度が遅くなったにもかかわらず、それを気に入っています。特に彼がきしむとき)
そのようなことを収集している人にとって、もう1つ言えることです-回転センサー(アクセルは適用されません)は必須です。なぜなら、キャリブレーションと一定の値がないと、2つの異なるドライブとホイールの同じ速度を達成することは不可能だからですしたがって、ロボットは輪になります。キャリブレーションが良好な場合-非常に大きな円の周りにあるため、これは壁から壁へ移動する場合にのみ顕著になります。悪い場合は、かなり早くなります。そのため、次のバージョンでは、より複雑なセンサーを設置する予定です。もちろん、より適切なドライブです。
小さいドライブでモーターの冷却を整理しようとする考えはまだありますが、速度を落とすことで正しい動作に十分な場合があります(現在、それらからのヒートシンクは嫌です)。うまくいけば、冷却ドライブとFreeRTOSに関するcat-bot v1.5に関する次の記事を待ってください!
ロボットを集めて、コテを楽しませてくれます!
