
この記事では、米国、ロシア、EU、中国で開発された全地球測位システムについて説明します。 グローバルな衛星ナビゲーション技術のサポートが電子デバイスにどのように実装されているかを説明し、最新のナビゲーション受信機の主要な機能と追加機能についても説明します。
GPS

GPS(全地球測位システム)は、軍事用に作成されました。 80年代後半から90年代初頭に機能し始めましたが、2000年までは、場所に対する人為的な制限により、民間の目的で使用する能力が大幅に制限されていました。
座標を決定する精度の制限を解除した後、誤差は100から20 mに減少しました(理想的な条件下での最新世代のGPS受信機では、誤差は2 mを超えません)。 このような条件により、システムを一般的なタスクと特別なタスクの広い範囲で使用できるようになりました。
- 正確な場所の特定
- ナビゲーション、実際の位置に基づいた地図を参照したルートに沿った移動
- 時刻同期
GPS衛星軌道。 地球の表面上のポイントの1つからの衛星の可視性の例。 目に見える衛星とは、理想的な条件(クリアフィールド)で観測者の地平線上に見える衛星の数です。
グロナス

ロシアのGPSアナログであるGLONASS(グローバルナビゲーション衛星システム)は1995年に配備されましたが、資金が不十分で衛星の寿命が短いため、広く使用されていませんでした。 このシステムの2番目の誕生は、その開発のターゲットプログラムが採用された2001年と考えることができます。そのおかげで、GLONASSは2010年に本格的な作業を再開しました。
現在、24個のGLONASS衛星が軌道上で動作しており、地球全体を航法信号でカバーしています。
最新の民生機器は補完的なシステムとしてGPSとGLONASSを使用し、見つかった最も近い衛星に接続するため、作業の速度と精度が大幅に向上します。

例:ロシアの設計局の命令によりプロムワッドチームによって開発された、Android OSに基づく車のGPS / GLONASSナビゲーションおよび通信デバイス 。 GSM / GPRS / 3Gのサポートを実装しました。 デバイスは、交通状況に関する情報をリアルタイムで自動的に更新し、交通渋滞を考慮してドライバーに最適なルートを提供します。
現在、欧州のガリレオと中国のコンパスの2つの衛星システムが開発中です。
ガリレオ

Galileoは、2002年に発表された欧州連合と欧州宇宙機関の共同プロジェクトです。 当初、2010年には、このシステムの一部として30個の衛星が中地球軌道で動作することが期待されていました。 しかし、この計画は実装されていません。 現在、ガリレオの運用開始の推定日は2014年です。 ただし、システムの完全な使用は2020年以前に開始されることが予想されます。
コンパス

これは、2011年末に10基の衛星が打ち上げられた後に運用が開始された、北斗中国地域ナビゲーションシステムの開発における次のステップです。 現在、アジア太平洋地域の範囲内でカバレッジを提供していますが、2020年までにシステムがグローバルになると予想されます。
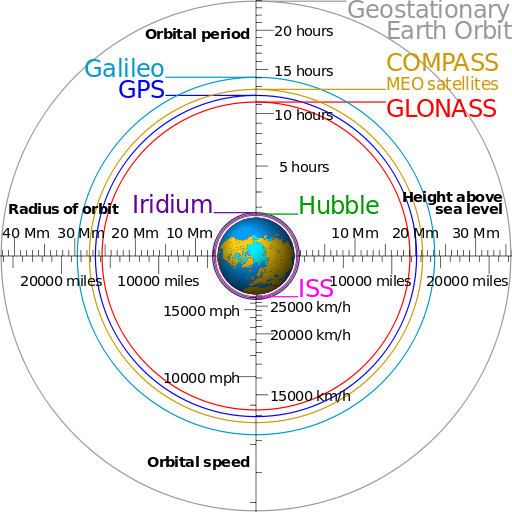
GPS、GLONASS、ガリレオおよびコンパス衛星航法システム(MEO)の軌道と、国際宇宙ステーション(ISS)、ハッブル望遠鏡、および低軌道の衛星のイリジウム系列の軌道、ならびに静止軌道と地球の公称サイズとの比較。
GNSSサポート
電子機器でのグローバルナビゲーション衛星システム(GNSS)の技術のサポートは、さまざまな方法で実行できるナビゲーションレシーバーに基づいています。
- スマートアンテナ-セラミックアンテナとナビゲーションレシーバーで構成されるモジュール。 利点:コンパクトで、調整が不要で、スケジュールを短縮することで開発コストを削減できます。
- MCM(マルチチップモジュール)-ナビゲーションレシーバーのすべてのコンポーネントを含むチップ。
- OEMは、RFインターフェイスプロセッサとベースバンド周波数プロセッサ(RFフロントエンド+ベースバンド)、SAWフィルタ、ストラップを含むシールドボードです。 これは現時点で最も人気のあるソリューションです。
ナビゲーションモジュールは、UART / RS-232またはUSBインターフェースを介してチップ上のマイクロコントローラーまたはシステムに接続されます。
ナビゲーション受信機の主要なパラメーター
ナビゲーションレシーバーが位置情報を提供するには、3つのデータセットが必要です。
- 衛星からの信号
- 暦-すべての衛星の軌道のおおよそのパラメータに関する情報、およびクロックと電離層の特性を調整するためのデータ
- エフェメリス-各衛星の軌道とクロックの正確なパラメーター
TTFF特性は、受信機が衛星からの信号を検索して位置を特定するのにかかる時間を示します。 受信機が新品であるか、長期間オフになっている場合、または最後にオンになってから長距離輸送された場合、必要なデータのセットを受信して場所が特定されるまでの時間が長くなります。
受信機メーカーは、無線データネットワーク経由で暦と天体暦をダウンロードして保存するなど、TTFFを削減するためにさまざまな方法を使用します(いわゆるAssisted GPSまたはA-GPSメソッド)。これは、GNSS信号からこのデータを抽出するよりも高速です。
コールドスタートは、受信者が場所を特定するためにすべての情報を受信する必要がある状況を表します。 これには最大12分かかります。
ウォームスタートとは、受信者が必要な情報のほとんどすべてをメモリに保持し、1分以内に場所を特定する状況を指します。
モバイルデバイスのナビゲーションモジュールの重要なパラメーターの1つは消費電力です。 動作モードに応じて、モジュールは異なる量のエネルギーを消費します。 衛星検索フェーズ(TTFF)の特徴は、大規模な追跡による低消費電力です。 また、製造業者は、たとえば定期的にモジュールをスリープモードにすることにより、エネルギー消費を削減するためのさまざまなスキームを実装しています。
原則として、すべてのモジュールはNMEA-0183テキストプロトコルを使用してデータを出力しますが、指定されたテキストプロトコルに加えて、各メーカーは独自のバイナリプロトコル(Binary)を備えており、特定の用途に合わせてモジュール構成を変更したり、追加機能にアクセスしたり、rawにアクセスしたりできます測定。 バイナリプロトコルは、マイクロコントローラでの使用に便利です。 テキストからバイナリデータに変換する必要がないため、文字列ライブラリと変換時間をなくすことでプログラムメモリを節約できます。
NMEA-2000標準は、NMEA-0183プロトコルの進化版です。 NMEA-2000は、物理層としてCANバスを使用します。これはRS-232よりもセキュリティが高いために選択されました。 データ転送プロトコルに関しては、NMEA-2000はその前身とは大きく異なります。 SAE J1939標準に基づくバイナリプロトコルを使用します。
すべてのモジュールの位置と速度に関するデータを更新する頻度は1 Hzですが、必要に応じて5または10 Hzに上げることができます。
アプリケーションに応じて、追跡する必要がある特定の動的特性 (たとえば、オブジェクトの最大加速度)に合わせてモジュールを構成できます。 これにより、最適なアルゴリズムを使用して、測定の品質を向上させることができます。
ナビゲーションタスクを実行するには、モジュールは複数の衛星から同時に信号を受信する必要があります。 複数の受信チャネルがあります 。 現在、この数は12〜88の範囲にあります。
GPSの位置精度は、使用される不正確な信号、無線信号の伝搬に対する大気の影響、受信機の水晶発振器の品質などにより、平均15 mです。しかし、修正方法を使用すると、位置決定の精度を向上させることができます。 この技術は、 ディファレンシャルGPSと呼ばれます。 補正方法には、地上波と衛星DGPSの2つがあります。
地上補正方法では、差分補正の地上局は、既知の位置と航法衛星からの信号を常にチェックします。 この情報に基づいて、VHFまたはDV送信機を使用してRTCM形式でモバイルDGPS受信機に送信できる補正値が計算されます。 受信した情報に基づいて、消費者は自分の場所を決定するプロセスを調整できます。 この方法の精度は1〜3メートルで、修正情報の送信機までの距離と信号品質に依存します。
北米で利用可能なWAAS (ワイドエリア拡張システム)やヨーロッパで利用可能なEGNOS (ヨーロッパ静止ナビゲーションオーバーレイシステム)などの衛星方式は、静止衛星から修正データを送信するため、より大きな受信エリアを実現します。地上の方法よりも。
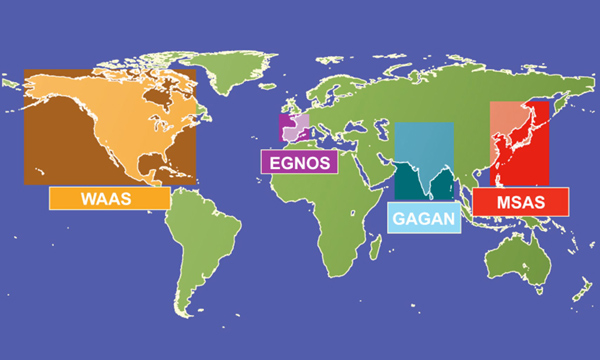
衛星ベースの微分補正システム(SBAS-Space Based Augmentation Systems)は、計算プロセスに外部データを統合することにより、ナビゲーションシステムの精度、信頼性、およびアクセシビリティを向上させることができます。
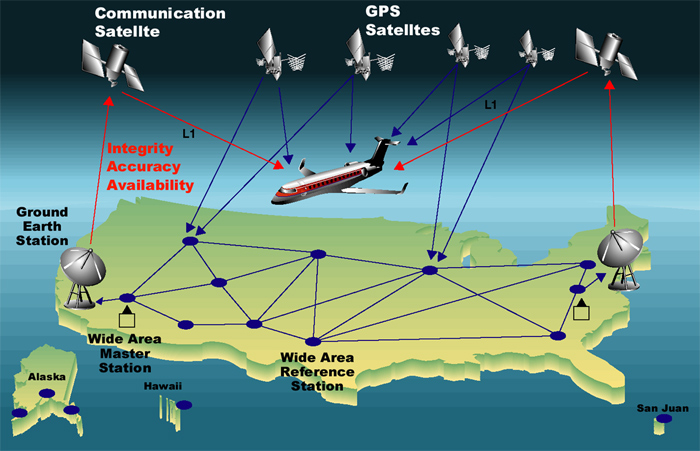
米国におけるWAAS(Wide Area Augmentation System)の原理のデモンストレーション
ロケーションの精度と受信の安定性に影響する主なパラメータの1つは感度です。 通常、受信機の入力での低ノイズ増幅器の品質と実装されたデジタル処理アルゴリズムの複雑さによって決まります。 最新の受信機の一般的な値は、検索用に143 dBm、追跡用に160 dBmの範囲にあります。
測位に加えて、GNSSは正確な時間情報を提供します。 原則として、すべての受信機にはPPS (1秒あたりのパルス、1秒あたりのパルス)出力があります。これは、UTCタイムラインと正確に同期した2番目のマーク(1 Hz)です。
ナビゲーションデバイスの追加機能
推測航法 。 移動方向と移動距離に関する情報(追加のセンサーによって提供される)に基づいて、受信機は衛星からの信号がない場合(たとえば、トンネル、地下駐車場、密集した都市部)に座標を計算できます。
一部のモジュールには、必要な周波数でトラックを記録するために、フラッシュメモリをモジュールに直接接続する機能があります(たとえば、SPIを介して)。 この機能により、個別のマイクロコントローラーの使用を拒否できます。または、電力消費を最小限に抑えるのに役立ちます(つまり、チップ上のシステムがスリープ状態になる可能性があります)。
これで、グローバルな衛星航法技術の表面レビューを終了します。 ご清聴ありがとうございました。 これらのGLONASSとGPSに基づいて完了したプロジェクトの例は、 Promwadの開発ページにあります。