
 カメラはケースの上部にあり、部屋の地図を作成するのに役立ち、ロボットにそれがどこにあり、まだ掃除されていないかを知らせます。 また、ロボットは、その助けを借りて、収穫が完了した場所から開始場所(充電の拠点)までの最短経路を見つけます。 写真では、コントロールボタンとアイコンを備えたLCDタッチスクリーン、センサーセットを備えたバンパー、集塵機を見ることができます。 IR距離センサーはバンパーに配置されており、ロボットが障害物を「認識」し、障害物に触れないようにします。 センサーはバンパーの表面全体に配置されていないため、障害物に斜めに衝突し、ロボットがそれに触れてから、機械的な衝突センサーをトリガーします。 この場合、掃除機は、指定されたモーションアルゴリズムに従って方向を変更します。 iCleboには、バンパーの最上部に追加の4番目のセンサーがあります。 これにより、ロボットは家具の下で動けなくなることなく動ける能力を判断します。 集塵機は、ケースのボタンを押すことで取り外され、ダストバッグはなく、電気機械部品もありません。 集塵機とフィルターは水で洗浄できます。 吸引機構は、ロボットの内部に直接配置されています。
カメラはケースの上部にあり、部屋の地図を作成するのに役立ち、ロボットにそれがどこにあり、まだ掃除されていないかを知らせます。 また、ロボットは、その助けを借りて、収穫が完了した場所から開始場所(充電の拠点)までの最短経路を見つけます。 写真では、コントロールボタンとアイコンを備えたLCDタッチスクリーン、センサーセットを備えたバンパー、集塵機を見ることができます。 IR距離センサーはバンパーに配置されており、ロボットが障害物を「認識」し、障害物に触れないようにします。 センサーはバンパーの表面全体に配置されていないため、障害物に斜めに衝突し、ロボットがそれに触れてから、機械的な衝突センサーをトリガーします。 この場合、掃除機は、指定されたモーションアルゴリズムに従って方向を変更します。 iCleboには、バンパーの最上部に追加の4番目のセンサーがあります。 これにより、ロボットは家具の下で動けなくなることなく動ける能力を判断します。 集塵機は、ケースのボタンを押すことで取り外され、ダストバッグはなく、電気機械部品もありません。 集塵機とフィルターは水で洗浄できます。 吸引機構は、ロボットの内部に直接配置されています。

ロボットクリーナーを裏返します。 2つの主要なサイドホイールがデバイスの動きを設定します。ドライブのない小さなフロントホイールです。 特別な磁気センサーがその軸上にあります。 ロボットの移動距離を測定する必要があります。 ホイールは水平軸の周りを回転しません。これは必要ありません。 ロボットは、サイドホイールの1つにトルクを伝達することで方向を変えます。つまり、操縦性にはまったく影響しません。
小さなプラスチックカバーの下には、2200 mAhのリチウムイオンバッテリーがあります。 このサンプルには2つのサイドブラシがあります。実用的な観点から、これは1つの通路で広い領域をキャプチャするのに役立ちます。 ベースボードにたどり着くには、片方のブラシだけで十分です。ロボット掃除機が1つでも完全に隅に到達するわけではありません。 2つのサイドブラシはゴミをメインターボブラシに導き、メインターボブラシはそれを集塵機に導きます。 吸引モジュールは、ターボブラシから破片を吸引するのに役立ちます。 集塵機にあるゴム製のスクレーパーが大きな破片を拾います。 この原理によれば、すべてのロボット掃除機は、大きな吸引力がないことを考慮して設計されています。 このデザインの滑らかな床でのクリーニング結果は、カーペットで非常に良好です-さらに悪いことに、ロボットは絨毛から塵を吸い出すことができません。
集塵機の近くには、2つのくぼみがあります-床研磨機用の溝です。 この掃除機はモップ機能を備えています。 モップの底部は底部に取り付けられており、ロボットは掃除機と拭き取りの両方を行います。 開始する前に、マイクロファイバーの布を水で湿らせます。 このプロセスでは、濡れることはできません。ロボットは、床から引きちぎられると、部屋の地図と現在の清掃プログラムを破棄します。 ナプキンは、小麦粉、細かい砂、塩などの細かいほこりを集めるのに役立ちます。 フルフロアのクリーニングでは、機能しません。

ツールを取り上げて、ロボット掃除機が内部からどのように見えるかを見てみましょう。 集塵機とメインターボブラシを取り出します。 フロントパネルにロボット掃除機を取り付け、ボルト用の5つの穴を確認します。 6番目の穴は、QC合格ラベルのシールステッカーの下にあります。

次に、バンパーの端を慎重に外す必要があります。 この場合、特別な困難は発生しません。プラスチックは十分に弾力性があり、強力です。

iCleboを天井に向けて、ロボットの装飾パネルを拡張します。 これを行うには、パネルの端を手前に引き上げます。 そのため、ロボット掃除機の充填にアクセスできました。
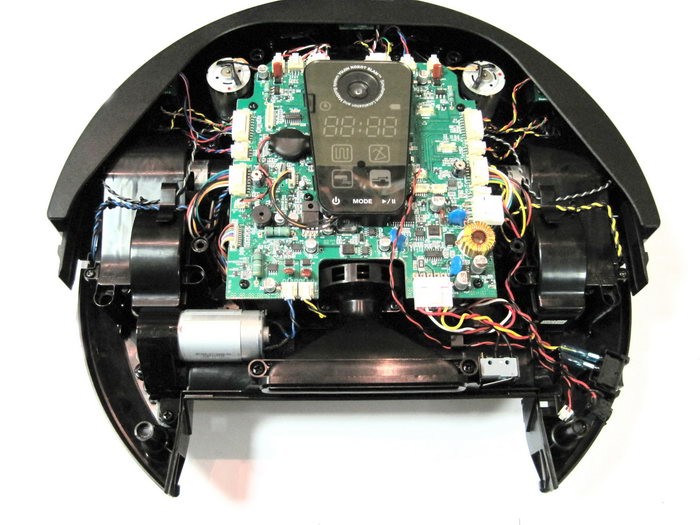
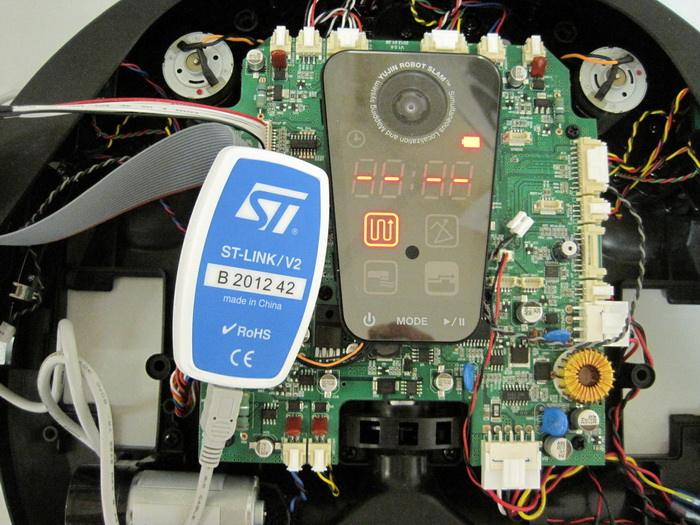
肉眼で主な要素を識別できます。 ロボットには6つの電気駆動装置があります。2つはサイドブラシ、1つはターボブラシ、1つは吸引モジュール(プラスチックケースの下に隠れています)、2つはサイドホイールハウジングに組み込まれています。 ロボット掃除機のLCD画面の右下には、その「頭脳」であるAbov MC81F4216Dマイクロコントローラーがあります。 特別なセンサーは、マザーボードと集塵機の設置場所の隣にあります。 閉じたとき、iCleboは集塵機が接続されていることを「理解」します。そうしないと、ロボットクリーナーは動きません。ディスプレイにエラーが表示されます。
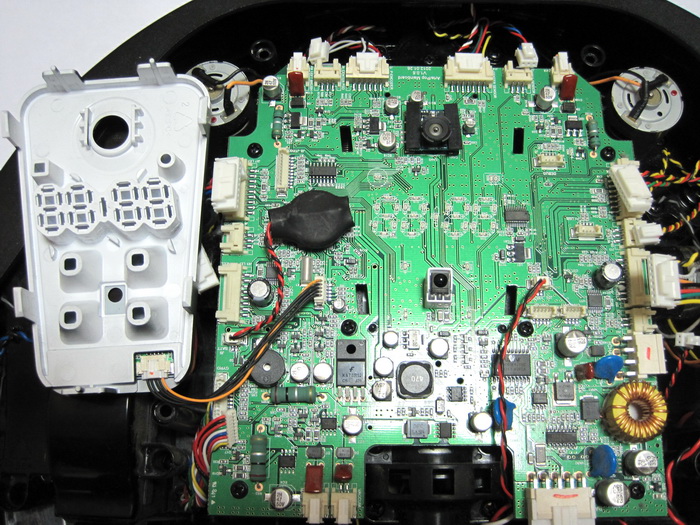
液晶画面を取り外します。 カメラ、その下に赤外線レシーバーがあります。 中央には、画面のLEDがあります。
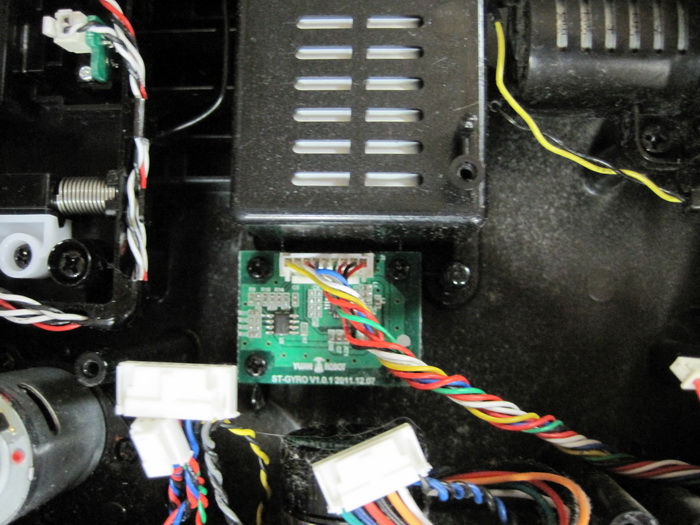
マザーボードを多くの接点から解放し、ロボットの回転角を決定するために必要なジャイロスコープを確認します。
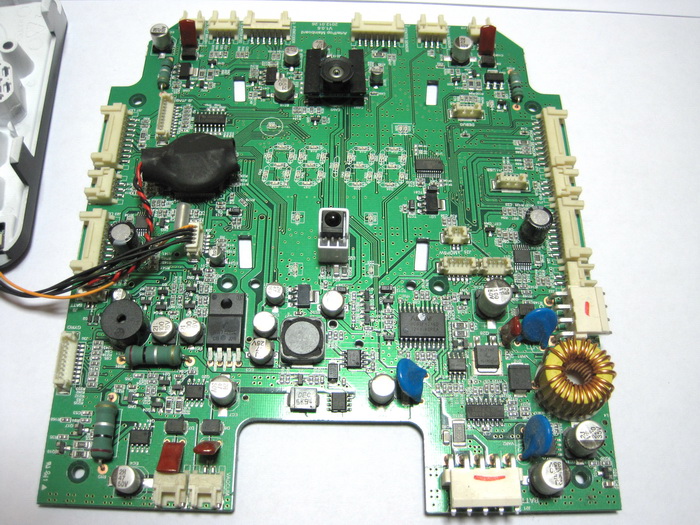
そして最後に、マザーボード自体をすべての連絡先から解放します。
ロボット掃除機のようなデバイスとは何ですか? デバイスのブロック図を以下に示します:
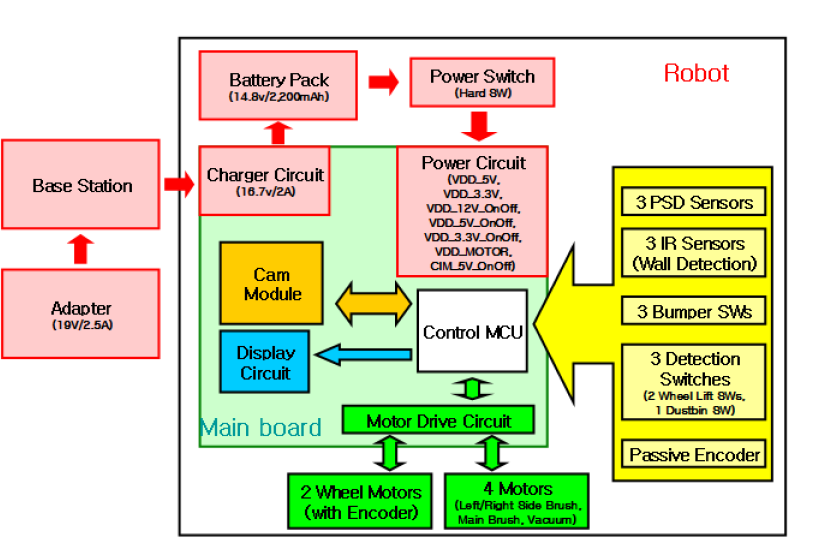
カメラモジュール、ディスプレイ、サイドホイールの電気駆動用の制御モジュールなどを備えたマザーボード(メインボード)があります。19ボルトアダプターは、ロボットを充電するためのベースを介して、回路の他のすべての要素に電力を供給するリチウムイオンバッテリーを充電します。 時計とタイマーには、追加のタブレットバッテリーがマザーボードで使用されます。 3つの高低差センサー(3つのPSDセンサー)は、デバイスの下部にあります。 3つの赤外線センサー(3つのIRセンサー)は、バンパー自体に直接配置されています。 障害物が検出されると、ロボット掃除機は方向を変えます。 IRセンサーが機能しないが、ロボットがまだ障害物にぶつかると、機械式バンパーセンサー(3つのバンパーSW)がトリガーされます。 この図は、3つの検出スイッチも示しています。2つのセンサーが車輪が床から外れたかどうかを判断し、3番目のセンサーには集塵機があります。 パッシブエンコーダー-走行距離を決定するためのホイールの前車軸の近くにあるセンサー。
ロボットがすでに掃除された場所とまだ掃除されていない場所を理解するために、上記のすべてのセンサーとセンサーから情報を受け取ります。 彼は移動距離と回転角度を測定し、カメラと障害物センサーの助けを借りて、掃除されているエリアの境界がどこにあるかを「理解」します。 将来の家庭用ロボットである掃除機は、カメラを使用して部屋を完全にマップし、部屋にいる人や動物の存在を判断します。おそらく、ロボットへのジェスチャーで動作を指示したり、動作モードを変更したりできます。
それは車輪に対処するために残っています。 サイドホイールを取り外します。 車輪の側面にあるセンサーは、ロボットが空間内の位置を判断するのに役立ちます。つまり、ロボットは床の上に立っていますか? 連絡先が開いている場合、ロボットは動作を停止します。

ホイールハウジングを分解すると、ここにそのようなギアボックスがあります。

もちろん、これらのコンポーネントはすべてソフトウェアによって制御されており、プログラムコードが正しく記述されていないと、ロボットは機能しません。 この掃除機にはソフトウェアを更新する機能がありますが、プログラマは掃除機の「頭脳」をフラッシュする必要があるため、経験豊富なユーザーのみがこれを行うことができます。 ST-Linkプログラマーが使用されます。 ロボットファームウェアの主要部分は、ボード上のJ2 JTAGコネクタを介してこのアダプターを使用して実行され、ナビゲーションモジュールのみがJ11 USBを介して更新されます。 さらに、ファームウェアの両方の部分が相互接続されています。
ロボット掃除機は複雑な技術的装置であり、特に3,000ルーブルの家庭用掃除機と比較すると、価格が比較的高くなっています。 ロボットがすべてのナビゲーションアクションを実行するためにカメラのペアで管理できる場合、生産コストが著しく低下するため、デバイスの最終コストが低下する可能性があります。 その間、買い手は主に利便性のために支払います:私たちはタイマーを設定し、仕事に行き、ロボットはあなたの不在で掃除し、自動的に拠点に戻ります。 もちろん、怠lazは進歩の原動力です。 通常、人々は何もしたくないので、他の人がすべての作業を行えるようにした方が良いでしょう。 これのためにちょうど家庭用ロボットが開発されています。