
最初の部分を読んでコメントしたみんなに感謝します。 あなたのおかげで、続編はさらに興味深いものになります。 まだ読んでいない場合は、読むことをお勧めします。 テキストはほとんどなく、クールなビデオがあります。
当初は、この部分が最終的なものになる予定でした。 しかし、スクロールに入るのに便利なように、これらの問題にのみ焦点を当てます。
- トレーニング。 飛行スキルの開発。
- モデルの選択:飛行機、ヘリコプター、またはクワッドコプター?
- 特定のデザインとサイズを選択する
- モーターとESC
- フライトコントローラー
いつものように、ポイントにまっすぐ。


私たちはそれぞれ、大きくて高価なものを集める前に、彼がこの上を飛ぶことができるようにしたいと思うと思います。 また、トレーニングは、趣味がまったくかどうかを判断するのに役立ちます。
基本的に、2つの方法があります。 最初はシミュレータです。 この方法は、グライダーまたはフライングウィングを操縦する人に最適です。
トレーニングコンソールを備えたシミュレータには費用がかかります。 そして、大きなモデルを構築することを固く決心するまで、シミュレーターと互換性のある優れたコンソールを購入する意味はありません。 目標がFPVである場合、シミュレーターの飛行も退屈です。
マルチコプターでの飛行に焦点を当てる場合、異なるフライトコントローラーがデバイスの異なる制御を提供するため、ユニバーサルシミュレーターでは役に立たないことに注意してください。
2番目の方法ははるかに楽しいです。 2-3ルーブルを割り当てて、マイクロヘリコプターを購入することをお勧めします。 シミュレーターよりも安価であり、マルチコプターの場合は問題なく準備できます。
なぜマイクロコプターではないのですか? まず、マイクロコプターには、大きなデバイスで使用するモードがありません。 彼らは全く異なって飛ぶ。 第二に、ヘリコプターの飛行スキルはわずかに過剰で十分であり、あなたの能力に自信を与え、この分野ですぐに視野を広げます。 第三に、優れたマイクロヘリコプターを飛ばすことは本当に喜びです。 ヘリコプターがあなたの好みに合わない場合は、グライダーでシミュレーターを試してください。 たぶん、翼はあなたのものです。
まさにマイクロヘリコプターなのはなぜですか? 部屋での飛行や、弱風の路上実験に適しています。 トレーニングに便利です。 優れたマイクロクラスを壊すのは本当に難しいです。 数日でそのような装置で円または8の字を描くことを学ぶことができます。その後、複雑な抽象化からマルチローターを制御するイメージが最も単純な計算に変わります。
以下は、第2部の総体積の30%を占めるマイクロヘリコプターの種類と動作原理の説明です。 4チャンネルクラシックおよび固定/集合ステップが何であるかを知っている場合は、ここをクリックしてFPVモデルの選択に直接テレポートします。 このセクションでは、最終的にWLToys V911をお勧めします。 あなたが初心者なら、もう一度読んで、マイクロヘリコプターの世界を新たに発見してください。
何を避けるべきですか? 制御チャネルとは何ですか?
そもそも、前の多くの人と同じことを言います。 食料品店で販売されている2チャンネルと3チャンネルのモデルは、あなたに適していません。 これらはヘリコプターではなく、空飛ぶファンです。
制御チャネルは、制御信号のレベルをスムーズにまたは個別に変更する機能です。 自動車には、速度制御と方向制御の2つがあると言うことはほぼ可能です(実際には、ギアボックスと、ガスとブレーキの分離により、より多くの車があります)。
2チャンネルシステム
2チャンネルのヘリコプターを想像してみてください。 彼は何ができますか? 彼は、鼻の高さと回転を変更する能力を持って常に前方に飛ぶか、回転の仕方を知らないが、速度を変えることができます。
3チャンネルシステム
2チャンネルヘリコプターからそれほど遠くない3チャンネルヘリコプター。 原則として、それらは同軸ですが、2ローターまたはクラシックがあります。 古典的な3チャンネルヘリコプターは次のようになります。

このモデルは、後部のネジにより前後に飛び、尾を上げ下げします。 通常のオフィスヘリコプターはメインローターを犠牲にしてこれを行い、パイロットがロールも制御できるようにします(縦軸に沿ってスイングし、左右にスライドできるようにします)。
ここでの高度制御は、両方のメインプロペラの速度を変更することで実現されます。 より深刻なモデルでは、ブレードの回転速度が変化するだけでなく、 ピッチ 、つまり回転面に対する傾斜角(取り付け角、迎え角)も変化します。
このヘリコプターは回転し、ネジの1つの速度を変更します。 それらは同じ軸で反対方向に回転します。 それはより速く回転し、そこに飛びます。
上の図で強調表示されている標識の1つは、必ず悪いヘリコプターに存在します。 箱(または売り手の顔)に何が書かれていても、だまされないでください。
赤外線リモコン
このような「プロペロイド」の遠隔制御は、原則として赤外線であり、壁からの反射が必要であり、原則としてその使用が制限されています。

通常のヘリコプターでは、リモートコントロールには、斜めではありますが、必然的に任意の方向にフリーランニングスティックがあります。これは、手動ミキシングの可能性がある4チャンネルコントロールの実装です。
通常の同軸
通常、初心者は4チャンネル調整をお勧めします。 同軸方式は、前のグループのように、軸上に2本のネジが同時に存在することを意味します。 しかし今では、ネジから機械本体に制御棒が出ています。 より正確には、ブレードの迎え角(サイクリックピッチ)を制御するスキュー装置に取り付けられています。 通常、このようなシステムは固定ピッチと呼ばれます。これは、ブレードが一緒に回転するだけで、互いに対して回転する能力がないためです。 次のようになります。

斜板は、ヘリコプターが任意の方向、右、前方、斜めに「スライド運動」することを可能にします。 この場合、コース、つまり鼻の位置を変更することはできません。 これにより、ヘリコプターの制御がマルチコプターの制御にできるだけ近くなります。
どのように機能しますか? 各ブレードが円を描くように移動すると、迎え角が変わります。 回転面に対してより鋭く傾けるほど、上昇する傾向が大きくなります。つまり、ヘリコプターを上げます。 このねじのブレードは縦方向の剛性結合(いわゆる固定ピッチ、固定ピッチ、FP)を持っているため、ねじの片側の迎え角は増加しますが、反対側では減少します。 それが小さく、ヘリコプターを上回る場所。
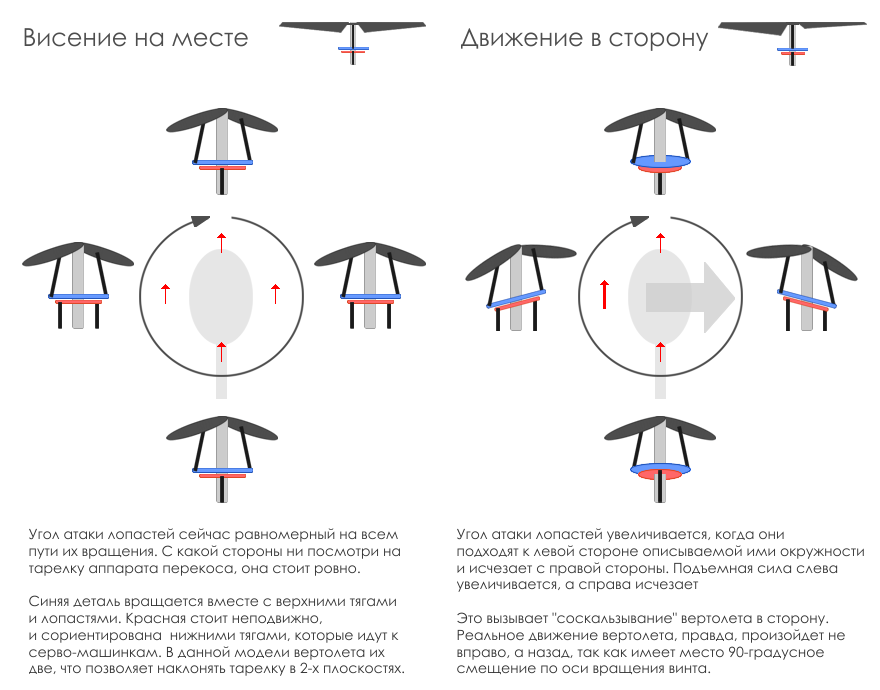
軸の周りのヘリコプターの回転は、別のネジの速度に対して1つのネジの速度を変更することにより、引き続き実行されます。 テールローターはここではまったく必要ありませんが、時には美を追求することなく配置されます。 中国では、明らかに、彼らは本当の同軸ヘリコプターを見ていませんでした、そして、彼らは後ろのプロペラがリアリズムのために必要であると思います。
その結果、4つの制御チャネルがあります。
- 前後にスライド(ピッチ)
- 左右にスライド(ロール、ロール)
- 高低(ガス、スロットル)
- 鼻の回転(ヨー、失礼、ヨー)
リモコンは通常、すでにラジオです。 メガヘルツとギガヘルツがあります。 長い格納式アンテナを備えた最初のもの、なしの2番目。 2.4 GHzが問題です。

正直なところ、私は同盟国が好きではありませんでした。 はい、オフィスを飛び回ることができます。 しかし、どういうわけかすべてが不器用に起こっています。 たぶん、もちろん、私はモデルに幸運ではなかった。 それはトンボのミニでした。 彼女は絶えず壊れ、フライバー(頭の上に重りが付いた安定棒)が飛びました。
しかし、ポイントはモデルではなく、クラス自体にあると思います。 同軸ケーブルは非常に安定しており、吊り下げに適しています。 彼はある種のフィギュアを作ることができます。 しかし、これを行うことは、ヘリコプターのようなものではなく、不十分な密閉空間でのマルチコプターのような不自然なものです。
別の迷惑な欠点は、同軸ケーブルが風と戦えないことです。 上部のネジは制御不能であり、風の中では本質的に帆になり、垂直線を遠くに持っていきます。 しかし、遅かれ早かれ、あなたはそれが一般的にどのようであるかを感じるために、路上で飛ぶことになるでしょう。
何らかの理由でまだ必要な場合は、品質のためにBlade mCX2をお勧めします 。
適切なモデル
クラシックなデザインのマイクロヘリコプターを購入したとき、店は2週間後には着かないと言いました。 これは間違っていることが判明しました。 数日後、私はそれを離陸することができただけでなく、それを引き受けたすべての人も離陸することができました。
味方とどう違うの? はい、実際、背中の2番目の(ステアリング)ネジが尾部にあるという事実だけです。 実際の同軸ヘリコプターには両方のプロペラがあり、おもちゃには下のプロペラしかありません(上に書いたように、帆は帆です)。 しかし、古典的なおもちゃのスキームは実際のものと大差ありません。 その結果、より多くの「ヘリコプター」ヘリコプターが手に入ります。 これは次のようなものです。

斜板と背面の垂直ネジに注意してください。 このようなヘリコプターは、初めてシャンデリアや部屋を飛び回ることができるとき、あなたに多くの喜びを与えます。 WLtoys V911を入手しましたが、後悔しませんでした。 彼らが彼に何をしたとしても、彼らはバッテリーを交換する必要がありました(200ルーブルの価格)。 同時に、V911はリモコンで約2500ルーブルかかります。 最初のカテゴリのファンのように。
買収後、私はこの特定のヘリコプターの推奨事項に関するインターネット上の投稿をいくつか見ました。私はそれらに100%同意します。 ビデオでは、私たちはあなたのために特別に飛びました(品質については申し訳ありませんが、暗闇の中で5秒を削除する方法を知っています):
このヘリコプターでは敵は見つかりませんでした。 しかし、彼は液晶テレビや車の敵なので、自由に飛びますが、それでも注意してください。 以下は、私がこのヘリコプターを殺そうとしたビデオです。
用語を使用する場合、これは固定ピッチとフライバーを備えたクラシックスタイルのヘリコプターです。 セールでは、固定ピッチのより機敏なフライバーもあります。 重りのある棒の役割はコンピューターが果たします。 フライバーがないため、モデルは風に強くなります。 一方、彼らははるかに速く回転するより大規模なブレードを持っています。 だから、アパートやオフィスで何かを台無しにするために、チャンスが増えます。
品質のうち、私は再びブレードをお勧めします。 今回は、 フライバーのないmSR XモデルとフライバーのあるmSRモデルです。 目標がFPVである場合、高品質のマイクロヘリコプターが必要な理由はありますが、V911はトレーニング期間中に失望することはありません。
十分すぎる
参考までに、マイクロクラスに参加したので、さらにクールなモデルがあります。 しかし! 彼らはアパートには適していません。 FPVではなく3Dフライトで試してみたいパイロット向けに設計されています。 これらは集合ピッチヘリコプターです。 一般的にCP( Collective Pitch )と呼ばれます。 このようなヘリコプターのスキュープレートは、2つではなく、3つのサーボドライブによって制御されます。

したがって、3次元で自由に動きます。 つまり、傾斜を持たせるだけでなく、ねじから異なる距離に配置し、シャフトの軸に沿って少しだけ上下に動かすこともできます。
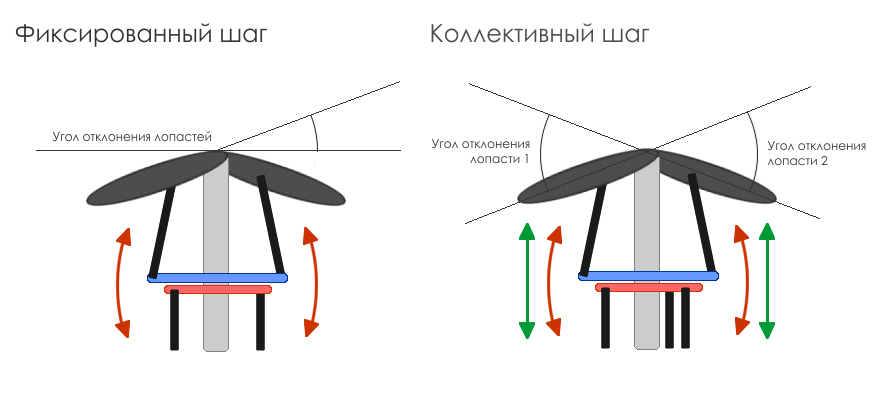
この設計により、前のグループのヘリコプターのすべての機能を保存し、ブレード間の角度を変更する機能を追加できます。 つまり、ここでは周期的なステップ(ネジの任意の側の持ち上げ力)だけでなく、一般的な(ネジの合計持ち上げ力)も制御できます。 そして、これにより、ねじの回転速度を変更せずに飛行高度を制御できるようになり、さらに、3D曲技飛行のためにねじの揚力を変えることができます。 つまり、ヘリコプターは「逆さまに」飛ぶことができます。
このようなヘリコプターの管理は、それ自体が安定しないため、より困難です。 つまり、前方に傾けると、リモコンのハンドルが中央の位置に戻った後も動き続けます。 ハングするには、ハンドルの反対の補正動作を行う必要があります。
屋内で飛ぶことができるバージョンには、 Blade CPX nanoがあります。 デバイスは魅力的ですが、レビューはあまり良くありません。 エンジンは速く燃えます。
Blade mCPX v2はわずかに大きく、非常に成功したモデルです。 しかし、彼はジムや路上で場所を持っています。 リモートコントロールなしで約7,000ルーブルがあります。
ブラシレスモーターにはさらに充電されたバージョンがあり、実際に注文しましたが、その後、クアドロコプターを支持して放棄しました。 Blade mCPX BLと呼ばれます。 唯一のマイナス-アパートやオフィスで、まあ、絶対に不可能で、危険です。 価格は、リモコンなしの店舗で約9000ルーブルです。
また、WLToys V922などの中国語版もあります。 リモコン付き6500ルーブル。
マイクロクラスに関する結論。 リモートコントロールについて少し。
一般に、トレーニングには、集合ピッチヘリコプターは必要ありません。 フライバーと固定ピッチを備えた十分なクラシック。 難しい経路を選択する場合、FPVシステムのカメラのサスペンションとブラケットを制御するために後で調整できるように、すぐに8チャンネル以上の通常のリモコンを取得することをお勧めします。 最大:7チャンネルがフライトコントローラーに必要+ 2機首方位カメラに必要+ 3つがHDカメラとあらゆる種類の懐中電灯のサスペンションに必要 合計で-12チャネル。
ただし、注意点が1つあります。 スペクトラムリモコンは、ブレードヘリコプターに適しています。 ほとんどのFPVドライバーは双葉に飛ぶので、考えてみてください。 リモートコントロールの詳細については、次のセクションの別のセクションで説明します。

ヘリコプター、ヘリコプター、それとも飛行機? このセクションを始める前に、真剣に考えなければなりませんでした。 ここでの比較表は良くありません。オートバイとボートを比較するのと同じです。 客観的ではないので、私も自分の意見を押し付けたくありません。
一般に、完全なFPVで興味深いビデオを撮影するには、飛行機または飛行翼とマルチコプターの両方が必要です。
ヴェネツィア クアドロコプターと飛行翼の参加で撮影。
どこから始めるかを自分で決めてください。 グライダーはより安価でロマンチックで、マルチコプターはより技術的に高度で、UFOに少し似ています。
個人的には、マルチコプターが所定の位置にハングアップする能力(グライダーは常に移動している)、背の高い垂直なオブジェクトを探索する、カメラを向けてオブジェクトを円形に飛行する能力に買収されました。 そして、マイクロヘリコプターの後、それへの切り替えは何とか簡単です。
グライダーと飛行翼は風により依存しますが、振動の影響を受けず、範囲と速度が大きくなります。 低高度でそれらを制御することは困難ですが、誰かが完璧にそれを行うことができます。
低空飛行翼
ビデオは、レシーバーとリモコンなしで265ドルでTBS CAIPIRINHAフライングウィングを示しています。 より大きなバージョンがあります-1300ドルからのTBS ZEPHYR 。 最初の部分へのコメントには、2000ルーブルの手頃な価格で人気のあるBixlerグライダーへのリンクがありました。 スピードコントローラー、レシーバー、トランスミッター、バッテリーなし。
FPVおよび射撃用のヘリコプターは、大きくて安定している場合にのみ適しています。 それを管理することは非常に困難です。 これは集合的なステップであり、それが示唆するすべてのことです。 あなたが初心者であれば、ヘリコプターFPVは非常に危険です。
今、私はマルチコプターにとどまることを提案します。 グライダーについては改めて説明します。 フライングウィングは、キール、つまりステアリングホイールがないという点で、古典的な飛行機やグライダーとは異なります。 その回転機能はロール制御と混合されており、制御チャネルは3つしかありません。

雲の中を飛行するためのマルチコプターの最小サイズは、プロペラを除いて対角線で450 mmです。 庭や公園での飛行に制限したいが、まだリモコンを購入していない場合は、完成したDJI Phantomクアドロコプターを詳しく見て、GoPro Heroデジタルカメラをインストールすることをお勧めします(詳細については、次のパートで説明します)。 リモートコントロールと合わせて、26,000ルーブルの費用がかかります。 これは世界のリーダーからの非常に高品質なものです。
ビデオシステムが統合されたPhantom Visionのリリースの準備をしていますが、この記事を書いている時点ではまだこの投稿は行われていません。

YouTubeでは、「 phantom fpv 」用のこのquadrocopterで非常に多くのビデオを見つけることができます。 以下に、未知の著者のためのトレーニングのアーカイブを投稿します。
PhantomのFPV
すでにリモートコントロールを持っている場合、またはさらに速く、より高く飛ぶことを希望する場合は、Phantomを使用しないでください。 もっと強力なものを集めました。 そして、私はそれを後悔していません。
そのため、マルチコプターにはさまざまな種類があります。
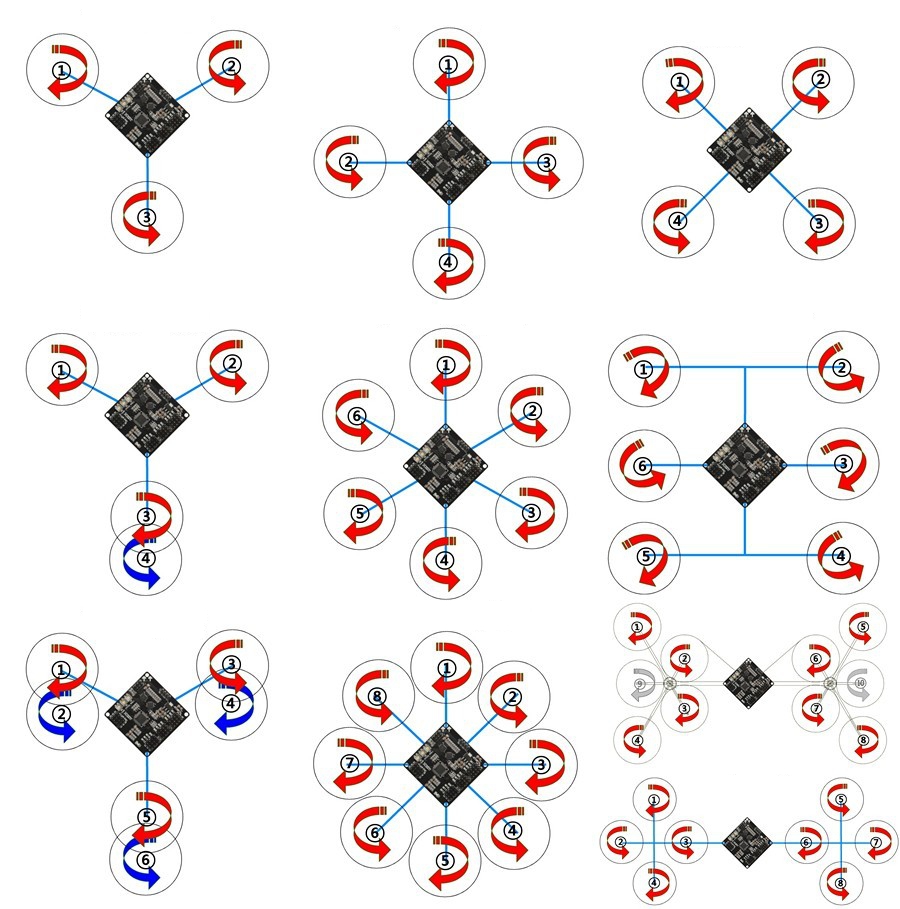
FPVの場合、X4、つまりquadrocopterが適しています。 前方のビームがカメラに干渉するため、+ 4は良くありません。 X6(ヘキサコプター)はボード上に大きな負荷を運ぶことができ、モーターの1つが故障しても落下しません。 ただし、故障はまれであり、FPV用の一眼レフカメラを携帯する必要はありません。 X8(octocopter)は、 RED-EPICやフルフォーマットDSLRなど、非常に難しいもののために組み立てられています。 そして、他の人にジェスチャーするために、グリップまたはそのような手にグリップを取り付けることができます:
高品質のX6およびX8から、再び、 DJIまたはTarotの折りたたみフレーム。 もちろん、そのようなデバイスは重く、大きく、高価ですが、ビデオはまったく異なる品質で取得されます。
オクトコプターとヘキサコプターからのビデオ
トリコプターもあります。 彼には3本の光線しかありません。 これは非常に機動性がありますが、設計が複雑で信頼性があまり高くありません(リアビームモーターが傾斜角を変えるため、このドライブは時々故障します)。 むしろ、エキゾチックですが、非常に興味深いものです。 最初のデバイスとして-おそらく非常に大胆なステップですが、その利点は次のとおりです。
- すべてのマルチローターの中で最も快適なドロップ
- フロントビーム間の120度の角度により、フレームにネジを取り付けずに広角ビデオを撮影できます
- 高い回転速度により、動きの速い物体を撮影することができます
- 興味深い制御とモデルの完全な制御の感覚

最も一般的なFPVスキーム-X4に戻りましょう。 クアドロコプターの高品質フレームには、 DJI F450とそのFPVモードTBSディスカバリーがあります。 前述のPhantomのメーカーからの最初と、有名なFPVチームBlack Sheepからの2番目。
TBS Discoveryプラットフォームの利点は何ですか?なぜそんなに人気があるのですか?

- F450の対称設計と比較して、フロントビームの間隔が大きくなっているため、写真のネジをとらえることなく広角カメラを簡単に配置できます。
- フレームは、主要な電子機器を取り付けるために配線されました。 これはきれいで見た目が良いだけでなく、モデルを簡単にします
- TBS Discoveryは、F450プラットフォームの標準ビームを使用します。これは、ロシアでも、専門店で購入できます。
- このプラットフォームには、さまざまな一般的なモーターと速度コントローラー(ESC)が非常に適しています。
- Blask Sheepチームは、フレームだけでなく、FPV用の実証済みで最適化された多くのコンポーネントとアクセサリーも販売しています
- TBS Discoveryはファッショナブルであると言えます。 特に彼らの署名ベストと組み合わせて。
- フレームには、2台のカメラ(コースと録画)の取り付けポイントがあります。 また、パン/チルトServoCity DDT500ダイレクトドライブチルトとTarot 2Dサスペンションを取り付けることも可能です(統合された独自のサスペンションと共にフレームのバージョンもあります)
- バッテリーはフレームのプレートの間に配置され、固定の信頼性と
良好な外観、良好な空気力学を保証します
欠点もあります:
- このモデルには、飛行の前後で異なる特性があり、飛行中に軸を中心にねじるとUFOのようにはなりません。
- モデルは追加されません。 これは重大な欠点です。 対照的に、彼らはスタイリッシュでありながら輸送用の巨大なケースを提供しています。
- 完成したデザインの思いやりは、あなたの中で眠っている「クリビン」をいくらか制限する可能性があります(さらには、眠らない)。 サスペンションを除いて、このフレームに他の何かを配置する方法を想像することはできません。
- 彼らの価格は許容できると思いますが、もっと安い選択肢があります。 クローンもあります。 マセラッティまたは充電されたサンヨン、それはあなた次第ですが、ここでの価格差は完全に異なります。 したがって、元のフレームの価格は75ドル、クローンの価格は30ドルです。 さらに、オリジナルにはボード上の配線があります。
- 小包が届くまで長時間待つか、30%の追加料金と送料がかかるロシアを探してください。 メーカーが商品をまったく出荷できない場合があります。
マイナスよりもプラスの方が多く、TBSディスカバリーは、おそらく私が明確な良心をもってお勧めできる唯一のものです。 最初の部分では、ロンドンからの壮大なビデオを見てきました。 ここにいくつかのビデオがあります。 それらはあまり効果的ではありませんが、実際にどのようになるかをよりよく理解できます:
カメラサスペンションを使用したTBSディスカバリーの機能
最後に楽しい事故で非常に自信を持ってFPV
側面図、電子機器のセットアップ、テスト飛行
DJI F450が近くのどこかに在庫がある場合、パッケージの到着時にBlack Sheepフレームを交換することを期待して、必要に応じて最初に組み立てることができます。 さらに、経験を積む時間もあります。 F450プラットフォームも非常に優れています。ここにビデオがあります
DJI F450の機能
このセクションの終わりに、フレームはそれほど重要ではないと言います。 自分でもできます。 私は、この問題に関する私の経験不足のために、一般にホーネット460を売られました。 専門家は私がそれを捨てるべきであることを保証した。 質問への答え- なぜ -が理解できなかったので、私はそれを捨てませんでしたが、それから良いヘリコプターを作りました。 故郷へのごみが減ります。

クワッドコプターは、通常、ステップ制御なしで4つの2枚羽根のプロペラで飛行し、スワッシュプレートを必要としない場合。 端での持ち上げ力は、モーターの相対回転速度を変更するだけで調整できます。 もちろん、電気モーターが使用されます。 ただし、写真を完成させるために、いくつかの例外を除いてビデオを投稿します。
コレクティブピッチニトロコプター( 退屈なビデオ )
体の傾きを制御するネジの可変回転面( 楽しい )
しかし、これはもちろん参考になります(代理人、2番目のビデオ、それが偽物である場合、つまり、それはまったく真実ではありません)。 FPVで武器なしで実行できます。 ヘリコプターのモーターはブラシレスで、サイズ、出力、シャフト直径、kV値が異なります。 もちろん、モーターにもたくさんあります。
ディスカバリーの場合、適切なサイズは22x12 mmです。 (Ø28x26-28mm)または22x16 mm。 (Ø28x30-34mm)(推奨)。 別のヘリコプターを収集すると、適切なサイズで簡単にナビゲートできます。
kVは、負荷(ねじ)なしで動作する場合、モーターに供給される各ボルトに対してモーターが発行する理論上の回転数です。 一般に、ディスカバリーは通常、比例ヘリコプターのように700〜900kVのエンジンで飛行します。 1200kVなどの大きな値を試すこともできます。
実際、低kVモーターの巻線はより細かくなります。 低電圧、大電流で動作し、トルクが増加します。 これにより、大きなネジを使用してより大きな加速を実現できます。 高いkVは小さなネジで機能し、おそらく、加速は小さくなりますが、速度は向上します。
私はすでに、車のギアボックスを備えた視覚モデルを提示するまで、大量のkV、バッテリー電圧、アンペア数、ネジのサイズと完全に混同されていました。
kVがギア、ギア比であると想像してください。 1速では、すぐに動き始めますが、速度制限に合わせてすぐに休みます。 3速ギアでは、より速く加速できますが、ゆっくりと動きます。
車とは異なり、ヘリコプターにはギアボックスがないため、ギア比を一度選択する必要があります。 車の中では、パワー、エンジン速度、総重量によって導かれます。たとえば、毎分3000の作業速度、90馬力、1トンの車両重量を備えた従来のエンジンは、常に2速ギア、1.5トンが最初、2トンあたり400フォースが3番です。ヘリコプターでは、エンジン出力の代わりに、回転ではなく、主電源電圧で、重量ではなくネジでバッテリーから電流が流れます。したがって、kV値が大きいモーターは、大型のプロペラには適さない場合があります(ハイギアでは多くの重量を加速できません)。理論的には、大きな瞬間電流出力(高出力のアナログ)を備えた高電圧バッテリー(回転エンジンのアナログ)を接続できますが、モーターが故障する可能性があります(伝送障害)。また、バッテリーの寿命が限られていることを理解する必要があり、より大きなトランスミッションを使用するとより多くの電流が必要になり、飛行時間が短くなりますが、より興味深い飛行ができます。
最大出力で負荷をかけずにブラシレスモーターを実行しないでください。kVは排他的な理論値です。ネジを使用すると速度が低下し、ネジがないとESCが失敗する場合があります。
上記のテキストのすべての類推が条件付きであることは明らかですが、そうでなければ、構造要素の相互の相互効果を説明することは単に不可能です。投稿が専門家に読まれている場合は、コメントで何か提案してください。
ブラシレスモーターの動作には、速度コントローラー(ESC、場合によっては単に:コントローラー、制御)も必要です。モーターは3相であり、2つではなく3つの接点があるため、バッテリーに直接接続することはできません。ESCは、動作可能な最大電流が異なります。最も一般的なものは30Aですが、18Aまでのより強力ではないものを使用できます(詳細は以下を参照)。通常のESCの動作周波数は400 Hzからです。経験豊富なファンの意見によると、450 Hzと1 kHz(新しいAfro ESC)の違いは見つかりませんでした。
ここで、レギュレータがエンジン速度を個別に制御することを追加する価値があります。したがって、kVが小さいほど、調整の精度が高くなります。それは車の中の想像上の離散的なガスのようなものです-ギアが低いほど、速度変更の制御がより正確になります。
モーターのシャフト直径がネジに必要な直径よりも小さい場合は、アダプターを使用できます。さらに-適応性もあります。
Discoveryでは、メーカーは750KVモーターを推奨しています。独自のモーターは、実際にはRCTimer A2830-14 750KV 185Wのブランドで、3.175 mmシャフトと5 mmシャフトのネジ用アダプターを備えています。ロシアのどこかで見つかるかもしれません。モーターに書かれていることは遠くからは見えません。
より動的な飛行とより少ない振動のために、Black Sheepには改良されたESC TBS BULLETPROOF 30Aを備えた900KVモーターがありますセットで。実際、これらは5 mmシャフトと接着ラベル付きのTiger Motors MT2216-10 / MT2216-11 900KV 210Wモーターです。ただし、これらのエンジンの場合は、元のESC TBS防弾を使用することをお勧めします。
元のESCを待つ気にならない場合は、次の方法で解決できます。
- RCTimer SK ESC 30A-同じですが、ステッカーが異なります
- SimonKファームウェアを搭載したHobbyKing F-20A / F-30A BECプログラマブルESC
750KVモーターでは、4S 3.3Ahバッテリーで10〜12分間飛行できます。900KV-同じバッテリーで6〜8分、4.5Ah 4Sで最大11分。
次のパートでは、バッテリーとESCの取り付けについて詳しく説明します。
実績のある最適なオプションに限定したくない場合は、ヘリコプターを自分で計算できます。ツールは次のとおりです。
- eCalcマルチコプター -最適なプロペラの選択
- eCalc-モーターとネジの組み合わせの選択
- Adamone motorcalc-モーターとねじの組み合わせの選択

コントローラーの選択がなぜそれほど重要なのですか?実際、クアドロコプターの制御と特性は、フレームよりも電子機器とモーターに依存しているということです。さらに、モーターは、デバイスとコントローラーの飛行性能に影響を及ぼします-その制御と機能。
一般に、DJI社はF450プラットフォームとPhantomクアドロコプターに加えて、最高のマルチコプターコントローラーの1つを幸運にも製造しています。プロのシリーズWookong M / A2とアマチュア-Naza、バージョンV2とLiteがあります。
次に、それぞれについて順に説明します。
商業用の写真とビデオにはWookongまたはA2を選択します。オクトコプターと優れたサスペンションを組み合わせたウーコンは、250,000ルーブルに相当する深刻で高価なデバイスを形成します。コントローラー自体のコストは約1000ドルで、これはアマチュアFPVには高価です。機能を使用すると、Googleマップへのルートでフライトを作成(最大50ポイント)、コンピューターからフライトを制御(地上局にアップグレードする場合)、関心のあるポイントに焦点を当てる(下のビデオ)、関心のあるポイントをたどるなどができます。
Naza V2は、アマチュアNaza LiteとプロのウーコンとA2の中間です。兄のV2は、ハードウェアが弱く、マップ上のポイントが50ではなく16ポイントで、注目する特別なモードがなく、iPadの地上局がサポートされておらず、飛行中の最悪の安定化が特徴です。私の意見では、V2のオプションは専門家にとって議論の余地があります。自明ではない専門的なタスクに遭遇した場合、Wookongに十分な予算がなかったことを理解し、今では何かが最適ではありません。 Naza V2は、プロをプレイしたいFPV愛好家、または航空写真が仕事の取るに足らない部分であるプロに向いています。ロシアの15,000ルーブルからの価格。
クアドロコプターFPVには、おそらくNaza M Liteが最適です。費用がかかり(GPSを備えたロシアの8,000ルーブルから)、その機能は可能な限り削減され、依存症を促進します。同時に、それはうまく飛んでいます。初心者は、「ダミーパイロット用」の完全なパッケージに満足します。これについては、以下で説明します。
公平に言えば、Black SheepはOpenPilot CopterControlコントローラーをDiscoveryにインストールすることにも反対していることに注意してください。しかし、第一に、あなたはそれを調整することによって苦しめられ、第二に、それはアクロバットに適しています。初心者パイロットのFPVには適していません。
ライトが正確に着陸せず、V2と比較して飛行品質が悪いと説明する販売者がいる場合、耳を塞ぐ-これは、ディスカバリーが原則として最良の選択肢ではないプロのビデオ撮影でのみ顕著です。 Liteには、2軸ジンバル安定化機能もあります。
オートパイロットは、一部のプロが言うように15メートルの精度ではなく、風に応じて0.5〜1.5メートルの精度でNaza Liteでヘリコプターを着陸させます。特に今日の投稿では、道路の脇に自動操縦モードで着陸するビデオを録画しました。離陸した場所とまったく同じ場所。
本当の違いは、V2はマップ上のポイントで飛行し、独自のDJI OSDシステムに接続できることです(画面上のフライト情報)。ナザ比較表。問題は、TBS Discoveryにも独自のOSDがあることです。また、単一のOSDが有用ではありません。後で、中国のより有益で軽量で安価なOSDについて説明します。
マップ上のポイントでオートパイロットをプレイしたい場合は、フルバージョン(V2)を使用しますが、FPVの場合は、節約したお金でサントリーニ島へのチケットを購入し、美しい景色の中で飛行することをお勧めします。
各DJIコントローラーには、敏感な要素とHomeLock、CourseLock、およびAttitdeモード用のビルトイン防振があります。 HomeLockを使用すると、現在の機首位置を考慮せずにヘリコプターを制御できます。つまり、それ自体の上にペンがあります-それはあなたの方へ、右へ飛びます-それはあなたに対して右に飛びます。これは、デバイスがあなたから遠く離れていて、どのようにあなたに向けられているかわからないときに便利です。 CourseLockも同じことを行いますが、それは発射されたポイントではなく、鼻の最初の方向にのみ焦点を合わせています。 Attitdeは、スロットルスティックを飛行高度調整器に変えます。ここで、その中央の位置は現在の高度を保持しています。
GPS Liteバージョンは彼と共に、彼なしで来ます。私たちに-彼とだけ。問題の本質は何ですか:そのようなスティック上のパンケーキは、GPS受信機と磁気コンパスが配置されているフライトコントローラーに追加されます。
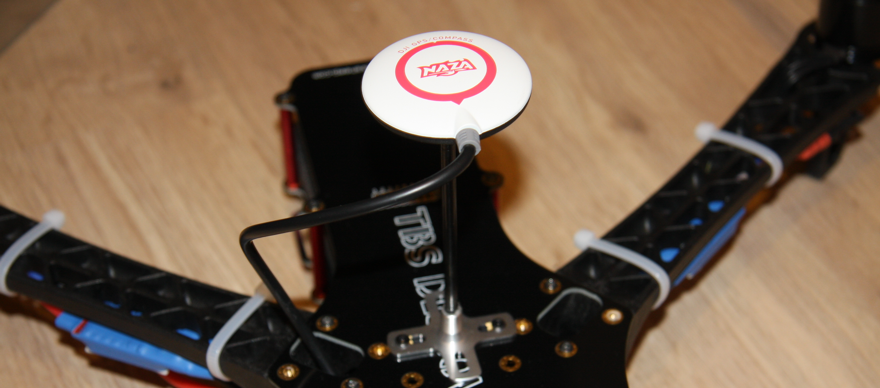
このデバイスをコントローラーに接続すると、GPS姿勢モードが表示されます。このモードでは、電子機器がヘリコプターの高度と宇宙での位置の両方を安定させます。つまり、疲れている場合、車、馬、または美しい少女が近づいている場合、リモコンのハンドル(スティック)を放すと、状況が変わるまでヘリコプターが空中でフリーズします。着陸方法がわからない場合は、リモコンの電源を切るだけで、起動した場所に座ります(手順をお読みください)。
飛行前にコンパスを常に較正することをお勧めします。前回と同じフィールドで飛行しても。以下は、この規則を無視したために失敗した自動着陸のビデオです。
GPS Attiモードは、数週間のフライトに役立ちます。徐々に、安全な高さで、それをオフにし、より速い姿勢モードに慣れます(高さコントロールのみ)。たとえば、GPS Attiモードでのヘリコプターの最大速度は65 km / hで、Attitudeモードでは80 km / hです。これはもっと楽しいです。 Nazaには極端なマニュアルモードもあります-しかし、それは本当に怖いです、あなたは本当にどこかでクラッシュすることができます。
おそらく、ここではNazaの設定方法については説明しません-これは非常に高品質の製品で、サイトにビデオマニュアルさえあります。いくつかのニュアンスだけを言います。
コプターを1分間起動する前に、瞬時モーター電源オフモードを設定してください!インテリジェントモードは、アパート内で直接結果をもたらす可能性があります。何らかの問題が発生した場合、モーターをオフにすることはできません。私はラッキーです-私のポスターは勝利のためにモデルベアを手に入れました。
COPTERをチェックする前に、キャリブレーションESCを実行してください。 ESCはリモートレシーバーに直接接続され、調整されます。キャリブレーションなしでNAZAは保存されず、起動時にCOPTERが表示されます。 Googleヘルプ。
最初の2つの警告がモーターの起動によって処理される場合、モーターが回転する方向を確認します。装置が前後に動く方向の両側で内側になければなりません。コントローラーの指示には、それがどのように見えるかの写真があります。ヘリコプターの種類とともに、上の図で正しいバージョンを確認することもできます。鼻が見上げています。
ネジの形状が回転方向と一致していることを確認します。ネジは異なる必要があります。 2組の2本のネジ-直接および逆。回転中、ネジはヘリコプターを下ではなく上に引き上げます。
GPSモジュールを取り付けるときは、その矢印がモデルの機首とコントローラー本体の矢印を指していることを確認してください。そうしないと、ヘリコプターが飛行場ですでに打ち上げられた後、制御不能なクラッシュが発生します。
すべての準備が整ったら、Naza Assistantを使用してジャイロスコープと加速度計を較正します。そのようなセクションがあります。
Naza Assistantには、制御電子機器のシャープネスを調整するセクションもあります。デフォルトでは、TBSディスカバリーの数値はあまり正常ではありません。より適切な組み合わせのオプションは次のとおりです。
- 750KVモーター:134/109/93/198および183/143
- 900KVモーター:166/135/131/179および188/176
英語のNAZAゲインデータベースの目標に応じた設定の拡張リスト
また、チャンネルX1とX2を構成して、リモートコントロールのホイールを制御し、上記のパラメーターを調整して、テスト飛行で電子機器を微調整することをお勧めします。
また、ホームに戻るためにリモートコントロールをオフにする必要がないように、トグルスイッチでForced FailSafeを構成すると便利です。 この場合、単に着陸するのではなく、 ホーム+着陸に戻るようにFailSafeを構成してください。 以下は、さまざまなリモコンのセットアップに関するビデオです。 残念ながら、英語で。
Futaba T10CAPの強制フェイルセーブの構成
Futaba 8FGの強制フェイルセーブの構成
Nazaの手順には、バッテリーを放電するときの保護の第1および第2レベルの設定に関するセクションがあります。 この手順を慎重に行ってください。さもないと、ヘリコプターが突然電流を失ったり、逆に保護システムの誤検知から落ちたりする可能性があります。
第1レベルを保護するために、電圧が無負荷状態であるか、完全に充電されたバッテリーの電圧を示し、そこから1ボルトを引きます。 負荷を0に設定し、警告がトリガーされるまで飛行します。 バッテリーの残留電圧を覚えておいてください。 設定で設定した値とバッテリーの実際の残留電圧の差は、負荷下での電圧の損失です。 通常、約0.5V。適切なフィールドに書き込みます。
2番目のレベルの保護でも同じことを行います。 そこでは、バッテリーの定格または少し低い負荷として、負荷なしで電圧を指定できます。 3Sバッテリーは11.1 V(公称)ではなく、10.9 V-0.6 Vの負荷損失に設定されています。 つまり、ヘリコプターは負荷がかかった状態で10.3 Vの電圧で植えられなければなりません、そうでなければ彼は自分でそれをします。
TBSディスカバリーなどのヒント:
- 適切なネジを使用し、バランスを取り、振動を減らします。
- 飛行時間を長くするには、低KVモーターと大型プロペラを組み合わせて使用します。 消費電流を追跡します。
- ネジがフレームに入るのを防ぐには、広角レンズには8インチ、平均角度には10インチを使用します。
- このプラットフォームには25A ESCで十分です。 最大ガスはモーターあたり15Aで、平均10Aです。
- 信頼性の高いESC取り付けのために、3.5 mmモーターコネクタをコントローラーボードに直接はんだ付けします。
- 標準DJIモーターには8 mmシャフトがあります。 APCネジは6 mm未満で作られています。 適合させる必要があります。 Graupnerネジは、必要に応じて立ち上がります。
- ESCを次のようにプログラムします:ブレークオフ、バッテリータイプNiMh(低バッテリー電圧によるLiPo付きモーターの停止機能を無効にするため)、カットオフタイプ:ソフトカット、カットオフ電圧低、航空機型飛行機、スタートモード通常、タイミング/応答モードが高い(400 Hz)、ガバナーがオフ、その他すべてもオフ
- 各ESCを個別に較正し、受信機に接続し、音信号の上限と下限にガスを置きます。 モーターに接続されていないESCはきしみ音を立てないことに注意してください。 彼らはスピーカーを内蔵しておらず、実際にモーターをきしみます(子供の頃のように、モーターを介してラジオを演奏した人もいました)。
- ネジの推力は、どれだけの速度ではなく、どれだけ引くことができるかに影響します。 したがって、推力は加速度に影響し、kVは速度特性に影響します。
- 1つのESCでBECのみを使用して5ボルトを接続し、他の3つのESCの赤線は使用しないでください。 パルスBECは、並列に接続すると失敗します。
- eCalcの結果は「過剰電力」を示すはずです。 マルチコプターには多数のネジがあるため、負荷は均等に分散され、モーターは曲技飛行のピーク時にのみ極端に負荷がかかります。
- モーターが停止した場合は、システムの電圧を上げます。たとえば、3Sの代わりに4Sバッテリーを使用してモーターのトルクを上げます。 何も燃やさないでください。
- スマートフォンまたはその他の既知の方法を使用してモーターのバランスを取ります。
- 飛行高度の制御を簡素化するために、スティックの中間位置で平坦な領域に到達するようにガス曲線を調整します。
- スティック上部のガス曲線を90%に制限します。 自動化のために10%の予備が残っているため、コントローラーは全速力でもアクションを調整するのに役立ちます。
- スティックをセンターに近づけるほど感度が低くなるようにするには、姿勢モードではロールとピッチに30%指数を使用し、リモコンの回転に10%を使用し、レートモードではロールとピッチに50%を使用し、回転に20%
- 重心(CG、CoG)は、モーターの負荷分散のバランスをとるために必要です。
- フライトコントローラーは、モデルの重心に配置する必要はありません。指示に示すように、TBSディスカバリーに取り付けます。
- フライトコントローラーを好きな場所に配置して、設定の誤解を補うことができます
- ダクト内を飛行する場合は、Naza Assistantでスティックをキャリブレーションするときに宝石の精密な制御を実現してください。 キャリブレーションの前に、リモコンのスティックのストローク制限を100%ではなく140%に設定します。 これにより、制御信号の解像度が向上します。
- リモコンのトグルスイッチを調整して、スティックの移動制限の異なるセットを切り替えることができます。 たとえば、キャリブレーション中に100%または140%の制限を使用した場合、50%のロールとピッチのコントロールは、よりスムーズな飛行を提供します。
- 飛行中に短絡しないように、はんだポイントを何かで密封します。
- リチウムポリマーバッテリーの長寿命のために、各セルの電圧が3.7ボルトの公称値に低下したときにトリガーされるように放電警告を設定します。3Sの場合は11.1 Vです。-4S 14.8 Vの場合
- ビデオ録画を見ながら「ゼリー」エフェクトを見る場合は、カメラとモデルの間に柔らかいものを入れてください。
- 飛行中にビデオに水平線が表示される場合は、vTX(モデルのビデオトランスミッター)の下に何か柔らかいものを入れます。
- トラクションの中心は、モデルの重心よりも鼻に15 cm近い位置にあります。
- 鼻が重すぎる場合-これが悪いです。尾も悪い場合、まっすぐに飛んでいるときに耳が聞こえます。
- Nazaコントローラーケースの側面を黒いリボンで密封します。これにより、明るい太陽の下で、太陽光線が内部に直接侵入したときにモデルの高さが低下しないようになります。
- GoProカメラのフレームにネジが見える場合は、ネジをトリミングする必要はありません。カメラの下に1.5 cm置きます。
- ESCのシュリンクを壊してプログラムする場合は、ESCに新しいシュリンクを置きます。 20 mmフィット。
- APCネジは、Graupnerの大型サイズと同じように動作します
- 飛行中は電圧に注意してください。 理想的には、定格のバッテリー電圧に達したら着陸します。
英語での詳細なヘルプはこちらから入手できます 。
もちろん、ナザだけがフライトコントローラーではありません。 しかし、はんだごてとオシロスコープで数週間踊るのではなく、今日のフライトのヘリコプターを集めているなら、これがおそらく最良の選択です。
Nazaという名前があなたの好みに合わない場合、次の32ビットの類似物があります。
- CC3D OpenPilotはうまく機能します。 設定は重いです。 購入するのは難しいです。
- Rabbit Flight Controller IIクローズドシステム。 ソナーは高度を維持するために必要です。 少し飛ぶ。 MultiWiiからコードを盗むと噂されています。 一部の人々は、コントローラー構成ユーティリティーを本当に嫌います。
チャンスを取り、8ビットシステムを試してみたい場合:
- AdruPilot Mega Acronym APM。 ナザのような費用がかかります。 ある人はそれが悪化しないと言い、他の人は悪化します。 現在、32ビットコントローラーへの移植が進行中です。 通常のフライトでは、多くのパラメーターを慎重に調整する必要があります。 私が理解しているように、これはWazaong-Mの機能的類似物であり、Nazaのコストがかかりますが、構成がより困難です。 私の意見では、射撃でお金を稼ぐなら、ウーコンを入れるか、APMを設定して「汗」をかいて保存することができます。 APMのセットアップに費やした時間は、コントローラーの価格の差よりも安くなる場合があるため、このソリューションは経済的なものである可能性が高くなります。 ただし、高価なヘリコプターを使用すると、より興味深い注文を得ることができます。 はい、そしてあなたは交渉に自信を持ちます。 FPVの場合、Wookong / A2 / APM機能は明らかに冗長です。
- MultiWiiはうまく機能しますが、マニュアルを学習してPIDを調整してから1か月後です。 パッケージには、振動絶縁と圧力センサーの保護を行う必要のあるボードが含まれています。
- 残りの8ビットコントローラーは、定義により32ビットシステムに失われます。
一部の専門家は、特別なモードのない安価なコントローラーで最初に練習することを推奨しています。 私自身は、ホーネットを買って、この餌のために落ちました。 これがなぜ価値がないのかを説明します。
- 最初に安価なコントローラーを購入し、次に良いコントローラーを購入すると、安価なコントローラーの代価が高くなります。 これはまったく意味がありません。 良いコントローラーは安価なモードで動作します。 だから、私はホーネットのコントローラーとは何の関係もありません。 なぜ必要なのですか?
- 安価なコントローラーで二次曲線を分割(および分割)できます(通常のコントローラーを時間内に購入しない場合)。 これは、保険なしで飛行するために発生します。 つまり、デバイスの制御を失った場合、魔法のSTOPボタンはありません。 優れたコントローラーは、ボタンを1つ押すだけで(トグルスイッチを切り替えることで)ヘリコプターを強制的に空中に固定できます。 休憩の後、このポイントから直接飛行に戻ることができます。
- 初心者が高高度で安定せずに手動モードを練習することをお勧めします。これにより、予期しないヘリコプターの動作の場合に数秒のマージンがあります。 安定モードの助けを借りてこの高さまで離陸し、そこから降りる方が良いです。 コントローラーにこのモードがない場合は、すぐに20メートル以上になるのが怖いでしょう。 地上またはその近くを飛行しますが、これは危険で困難です。これは、地球の高さを制御することがより難しく(下の境界線が表示される)、低高度ではより多くの障害物があり、表面には制御を変更する画面効果もあります。
- すぐにデバイスにカメラを置いたとしても、遅かれ早かれ、視覚的な管理方法を学びたいという欲求が残ります。 このためだけに、必要なすべてのツールがあります。 安定化をオンにし、自分に対するデバイスの向きの制御が失われた場合にモニターを見ることができます。
要約すると、私はこれを言います。 苦労してきた人は、残りの人にとって簡単な道を望んでいないという印象を受けます。 現在、市場では、私が理解しているように、移行期間は熱心なエンジニアから写真やビデオの専門家やFPVの愛好家までです。 これにより、異なる世代間で緊張が生じます。 そしてそれは正常です。 世代内では、iPhoneとAndroidのユーザーへの分割に似た分離があります。 私の意見では、違いは、今日のDJIはAndroidの残りよりもiPhoneのアナロジーに近いということです。 結局のところ、DJI製品はすぐに使用でき、残りのコントローラーは特定のデバイスごとに調整する必要があります。 ヘリコプター製造業者は、Androidで発生したように、代替コントローラー自体のヘリコプターの「シェル」をリリースして、使用を簡素化する可能性があります。 第1世代のエンジニアは、DJIソリューションの近さや人為的な制限を試すことができないため、Androidに近いことは明らかです。 結局のところ、誰でも、そうでなければ、オープンコントローラーに配線されている数学的な飛行モデルを最適化できるでしょう。

それで、私の投稿の第2部は終わりました。 まだ解決されていない問題は、主にビデオに関連しています。 次のパートで私が計画していることの完全なリストは次のとおりです。
- コントロールパネルとその信号の受信機の選択
- 機械部品(ネジ)
- バッテリーと充電
- 映像 ビデオカメラの数と種類。
- 映像 カメラ用のサスペンションとブラケット。
- 映像 送信機と受信機。
- 映像 メガネとモニター。
- 画面上のフライト情報。 テレメトリー。 OSD
- 出発したモデルを検索します。 GPS追跡。
- インストール。 シュリンク、フィルター、シールド、フェライトリング。
専門家への挨拶
有益なコメントと資料に関するコメントに感謝します。 マルチローターシステム、ロボティクス、FPV、ビデオ編集、またはサウンドデザインの経験があり、少なくともある程度の空き時間があれば、個人で書いてください。 誰がそれから来るのかを知っています。 少なくとも次の部分をもっと面白くしましょう。
謝辞
ユーザーに個人的な感謝を表明します。
あなたはコメント、リンク、親切な言葉で私を助けてくれました。 続編を書く精神を集める。 多くの問題について専門的なアドバイスをしてくれたユーザーsmit1237に感謝します。