
ブラインドを自動化するというアイディアは、ずっと前に私の頭の中で生まれました。 これは、私の部屋の窓の特定の配置によって特に促進されました:昼食後、私の窓から明るい日光が差し込んで、コンピューターの作業を妨げ、生産的な活動に従事する意欲を妨げます。 同時に、シャッターが閉じられた部屋にいることは、私の意見では疑わしい喜びです。 太陽光の強さに応じて、翼の回転角度を自動的に変更できるシステムを手に入れたかっただけでなく、リモートコントロールから手動で制御する機能も必要でした。
最初のタスクは、フラップ自体を自動化することでした。 シャッターフラップ自体の位置を示す回転モーターとセンサーが必要です。

エンジンを設置する主な障害は、翼の回転角度を変更するための通常のウォームドライブでした。 その存在により、モーターの内部設置の可能性がブロックされましたが、標準ハンドルの代わりにエンジンを外側に配置することも非常に困難でした。 最終的に、手動機構を完全に解体し、ブラインドの内側にモーターを設置することが決定されました。
エンジンはGM12-N20VAマイクロギヤードモーターギアモーターを使用したため:

このエンジンには次の特徴があります。
- 動作電圧:2-5 V
- 定格電圧:5 V
- ギア比:100:1
- 無負荷速度:145 rpm
- 無負荷電流:40 mA
- 負荷時の速度:100 rpm
- 負荷電流:150 mA以上
- 負荷トルク:0.2 kg / cm
- ロック電流:520 mA
- トルク:0.78 kg / cm
- サイズ(L x W x H):24 x 12 x 10 mm
- 出力軸:D字型、d = 3 mm、長さ10 mm。
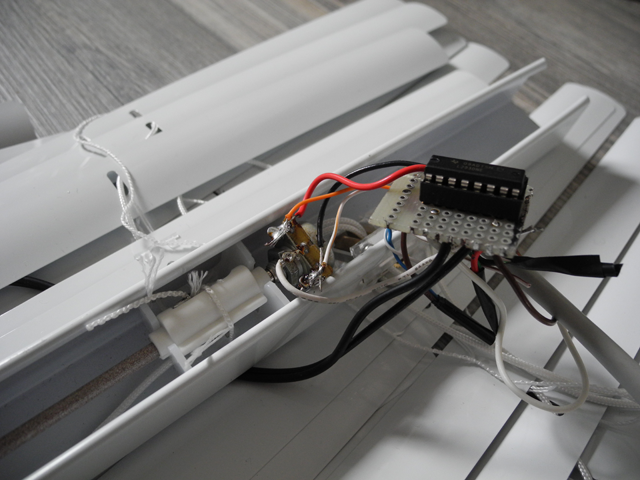
モーター出力シャフト自体がブラインドメカニズムの穴よりもわずかに小さいことが判明したため、しっかりと接続するために、熱収縮がシャフトにはんだ付けされました。

モーターを制御するために、私はかなり一般的で長い歴史を持つL293Dデュアルチャンネルエンジンドライバーチップを使用しました。
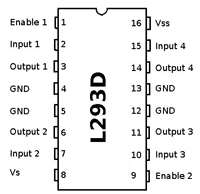
モーターは、入力1および入力2のレッグの信号に応じて、マイクロ回路の出力1および出力2の出力に接続され、2番目のチャネルと同様に、モーターは一方または他方の方向に回転します。
位置センサーを使用すると、以前は思っていたほど簡単ではありませんでした。 その設計のすべてのオプションの中で、モーターと同じ軸に取り付けられたポテンショメーターに決め、その後コントローラーのADCに接続されました。
驚いたことに、光センサーの問題は少なかった。 ハードウェアストアから購入した安価なLED懐中電灯からソーラーパネルを取り外して使用しました。 懐中電灯のカバー自体が良いケースとして機能しました。

リモートコントロールには、マスターキットキットのリモートコントロールと共にTSOP31236 IRレシーバーを使用しましたが、この場合は、他のものを使用できます。

スキーム全体は次のとおりです。

ADCで光センサーから受信したデータに応じて、シャッタールーバーはいずれかの位置に移動しますが、シャッターの現在位置はセンサーによって制御されます。センサーは、Adruinoアナログ入力に接続されたポテンショメーターです。
IRリモートコントロールを使用するために、私は自転車を発明せず、既に準備されたIRremoteライブラリを使用しました。
これが実際のビデオです。
天気が悪いため、センサーの感度は低下しました。
将来的には、システムをより「深刻な」マイクロコントローラーに移し、すべての要素を1つのプリント回路基板にコンパクトに配置し、ケースに隠したいと思います。