しばらくの間、私はアマチュアのモータースポーツに興味を持つようになりました。いいえ、夜のストリートレースではなく、昼間はかなり合法的な競技会であり、関連する構造に同意しました。 多くの人が疑うように、そのような競技の目的は相手よりも速く距離を走ることです。 距離を測定する理由。
最も簡単な方法は、ジャッジにストップウォッチを与え、スタート/ストップボタンを時間内に押すことを教えることです。 この方法の欠点は明らかです-容認できないほど低い精度と裁判官のバイアスに関する参加者の疑い。 別のポイント-3番目のカテゴリーのアマチュアラリーを実施する場合、開始と終了はしばしば間隔が空いており、時間は「同期された」審判の時計によって測定されます。 実際には、これらは30分のrアラームで、10分間で数秒間互いに逃げます。
より現代的な方法は、テレメトリの使用です。 最も一般的なオプションは、IRビームの交差によってトリガーされる1つまたは2つのアライメントで、これらの交差でストップウォッチを制御します。 私が見たオプション(アマチュアのもの、私たちはプロのシステムを考慮していません)は、多くが望まれ、最高の希望を残しました。
例1. 4分の1マイルのレース(402m)、ドラッグレースでもあります。 最初に、2ペアまたは3ペアの光線を持つIRターゲットがインストールされます。 フィニッシュラインには、1対の光線を持つターゲットも設置されます(1トラックあたり1ビーム)。 開始信号が開始範囲に接続されています。 コントローラーのコマンドで、信号機は開始シーケンスのカウントダウンを開始し、その後参加者はレースを開始します。 時間は、緑の信号が点火されてからフィニッシュラインを通過するまでカウントされます。
そのようなシステムの論理と構造は明らかです。 小さなマイナスは、開始ターゲットと終了ターゲットを接続するワイヤの0.5キロメートルです。
例2.時計に対するリングレース、いわゆるタイムアタック。 2人の参加者の距離で同時に往復。 レースの結果は、参加者のラップタイムがアライメントの連続パス間の間隔に等しいことです。
すべてが明らかです。 私の実装から見た短所:
-各参加者が「開始」時に示された「彼ら」のターゲットのみを渡す必要性。そうでない場合、システムはサークルの通過時間を誤って考慮します。
-前の段落に関連して-ストリップの真ん中に構造の一部を見つけますが、これは結果に満ちています-しばしば中央ラックでシステムの故障との衝突がありました。
-ダウンコーン、落下バンパーの一部など、異物がターゲットを通過した場合のシステムの誤警報に対する不安定性 このような操作により、レースが終了し、再起動しました。 そして、参加者はすでに「最後のお金」で、ノッキングモーターで運転していて、勝つことを目指しました。 はい、それは残念です。
例3.ラリースプリント、スタート、フィニッシュは十分な距離を空けて配置されています-数百または200メートルのオーダーで、参加者は2〜3分間隔で開始します。 距離は、2人のジャッジの動作によって測定されます-開始時のジャッジは、クロックによって特定の時間にスタート信号を発し、フィニッシュ時のジャッジは、自分のクロックに従って終了時間を記録し、時間は読み取り値の差によってカウントされます
このタイミングの方法の欠点は、開始時と終了時のクロックの非同期性(筆者が書いたように、中国のアラームは移行のストールからよく使用されます)、および人的要因の影響です(開始時のジャッジは、フィニッシュのジャッジができるように、遅かれ早かれ車を解放することができます通過の瞬間を修正することは十分に正確ではありません)。
次のイベントでは、参加者と主催者の苦情を聞いた後、アマチュアモータースポーツ大会で使用するために、「自分の」要件に合わせてシステムを組み立てるように頼まれました。
このシステムの要件は次のとおりです。
-安い。 主催者によると、セミプロフェッショナルシステムのレンタル価格は15000ルーブルに達します。 競技当日-このオプションは、マニア向けではありません。
-さまざまなタイプのイベントに適応する機能-ドラッグ、リング、ラリースプリントなど。
-展開と輸送の容易さ-最小限の部品、ワイヤ、およびその他の付属品。
-競争プロセスの最大自動化-タイミング、結果の整理など。
上記の要件に従って、PCで情報を処理し、結果をプリンターまたはスクリーンに出力する機能を備えた、ワイヤレス情報転送を備えたモジュラーシステムを実装することが決定されました。
システムのモジュール性は、開始時、終了時、中間終了時など、ほぼ任意の構成で距離を置いて配置できる独立した赤外線ターゲットを作成することです。
各ターゲットは、ビームの交点の時間を記録し、固定の瞬間を中央コンソールに送信できます(コンソールはラップトップに実装されています)。 固定の瞬間は、1ミリ秒の精度で、年、月、日、時刻を含む完全なタイムスタンプです。 したがって、アライメントを通過する瞬間に関する情報を自由に使用できるので、ほぼすべての到着スキームをアルゴリズムで実装できます。
この実施形態における唯一の要件は、それらの間の断面の正確な同期である。 このような同期はGPS受信機を使用して実行されます。現時点では非常に安価で使いやすいです。 特別な手段を使用しない同期の精度は最大1μsです。
写真では-同時に最大6本の赤外線を処理できるアライメント用の実験用ボードと、開始信号機の制御。 なぜ6光線なのか? 少し後で説明します。

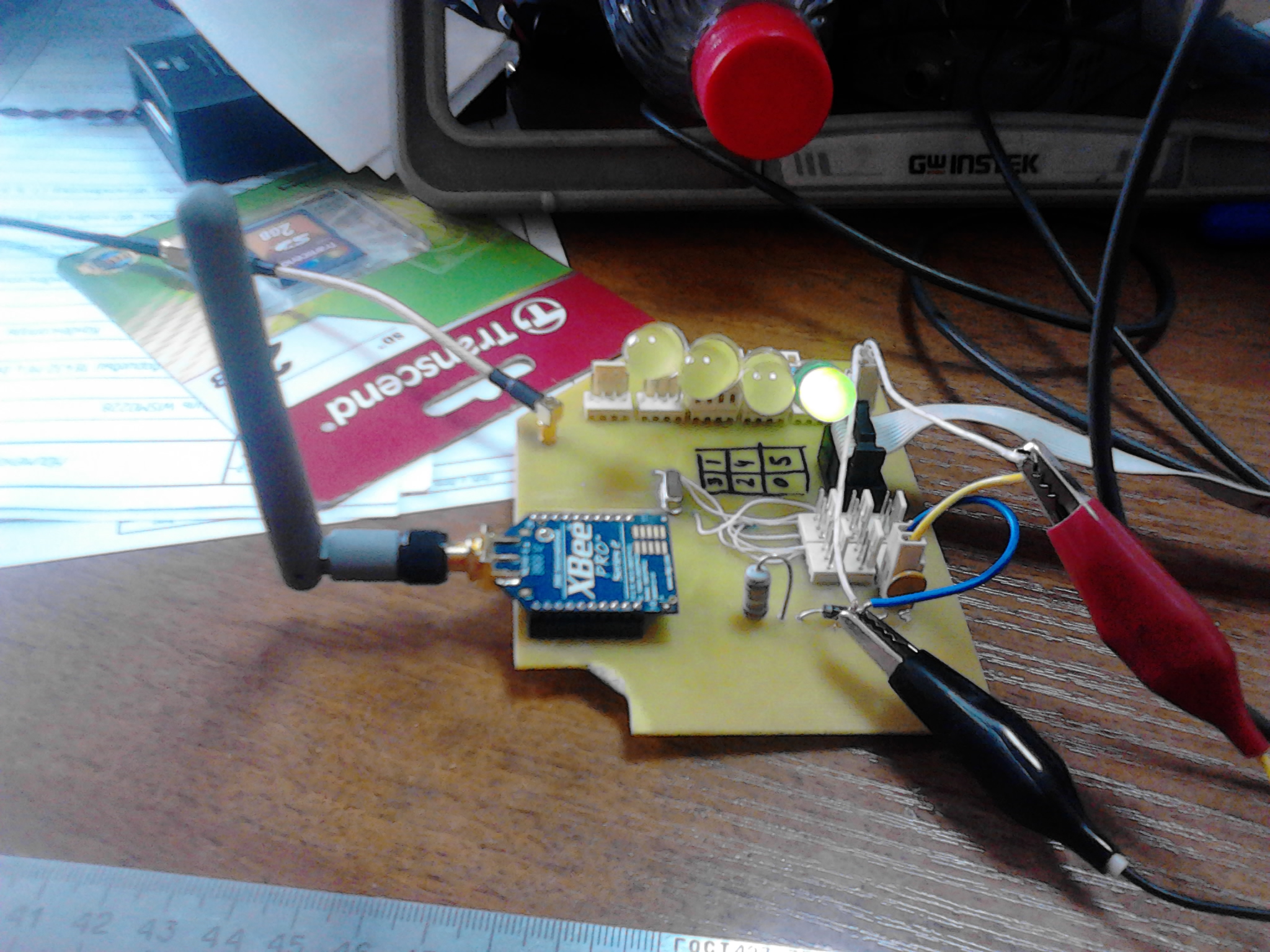
TSOP4038レシーバーは赤外線検出器として使用されました。これは、連続ビームが供給されると、内蔵AGCの結果として単純に「シャットダウン」され、ビームによるアクションへの応答を停止する他のシリーズレシーバーとは異なり、「連続」変調ビームの受信を可能にします。 この受信機には、38 kHzのIRビーム変調周波数が必要ですが、経験からこの値はかなり任意であり、32〜45 kHzの変調周波数がタスクに非常に適していることが示されています。
発光デバイスは、変調周波数ジェネレーターを搭載したTSAL6100 LEDです。 集光レンズの焦点に大まかに置きます。
エミッターについて詳しく説明します。 前に書いたように、写真のボードは一度に最大6本の光線を処理できます。 これは、信号機のあるレースでスタートラインに車を置くために使用されます。 いわゆるプレステージ、ステージ、およびスタート。 スタートラインに車を正確に配置するために、ステージビームはスタートビームから10〜15 cmの位置にあります。 そして、このビームが交差すると、信号機のステージインジケータが点灯し、参加者にスタートラインにいてレースの準備ができたことを知らせます。
一見すると、これについて複雑なことは何もありません。 しかし、実践が示しているように、10〜15 cmの距離に2つのLEDを配置し、「隣接」センサーを照らさないことは不可能です。 つまり、タスクは10-15 cmの距離で平行に進む2つの光線を独立して認識することです。解決策:「機械的」-センサーのみを照らすようにビームを集中させる、「アルゴリズム」-他の何かを考え出す
レンズでビームの焦点を合わせると、優れた結果が得られます。スポットサイズは8 mの距離で3〜4 cmを超えませんが、「ビーム」が1つあります。 25°C さらに、この照準では、エミッターの回転を2つの平面で実装するメカニズムを使用する必要があり、設計自体が複雑になります。
2番目の方法は、シリンドリカルレンズを必要とする1つの平面にビームを集束することですが、そのようなレンズは見つからず、このオプションを破棄する必要がありました。
3番目のオプションは、光線を別の方法で分割することです。 すなわち-時間内に。 ボード上には正確な時間信号(GPS)のソースが既にあり、「私たちの」瞬間の各ビームのみを含むため、各エミッタからの信号の有無を独立して評価できます。 これを行うために、GPS受信機モジュールもエミッター制御回路にインストールされ、それらの間で信号同期が行われました。
このような解決策により、ビームを「拡大」することが可能になり、エミッタをレシーバに向けることが桁違いに簡素化されました。
集束システムとして、最も安価な光学照準器の半分(150〜200rの範囲の照準器の価格)が使用され、後半は2番目のエミッターにそれぞれ使用されます。
別の迷惑は、レシーバーが太陽にさらされることです。レシーバーが明るい太陽に持ち込まれると、出力でランダムなトリガーパルスが観測され、誤った読み取りが行われました。 解決策は、水道管と食品ホイルです:)
これがどのように見えるかです。 中央にはレシーバーとワイヤレスモジュールを備えたユニットがあり、端に沿ってエミッターがあります。

データ転送
無線データネットワークとして、Zig-Beeに似たもの、つまりXbee-Proモジュールを使用することが決定されました(実際、これはZigBeeであり、バリエーションはわずかです)。 このようなモジュールを使用すると、最小限のプログラミングおよび構成コストでネットワークを展開できます。実際、トランスミッターのシリアルインターフェイスからレシーバーへ、またはその逆の通信チャネルを透過的にします。 さらに、Proバージョンでは、送信機の出力が増加し、それに応じて範囲も拡大しています。 テスト中、Wi-Fiルーター用の標準D-Linkピンアンテナを使用して、500mで安定した動作を実現できました。
データをコンピューターに転送するために、Xbee-UsbアダプターがXbee-ProモジュールとFTDI232チップに組み込まれました。
仕組み
GPSと同期した連続タイマーが受信ユニットに実装されています。マイクロコントローラーのハードウェアタイマーは、1秒のカウントダウンを提供する1PPS受信信号によって再起動します。
IRレシーバーからの信号は、マイクロコントローラーの外部割り込みに接続されます。 ビームが中断されると、現在の時間値がキャプチャされ、この「マーク」がコンソールに送信するためにキューに配置されます。
リモートコントロールへの転送は、現在の時点で蓄積されたすべてのサンプルの1秒あたり1回実行されます。 パネルはカウントの受け入れを確認し、確認されたカウントは送信キューから削除されます。
各サンプルには、トリガーされた信号の識別子と、信号がトリガーされたアライメントの識別子があります。
ハードウェアの作業はこれで行われます。 そのタスクは、ビームの交差の瞬間を検出し、このマークをリモコンに転送することです。
さらに、競争の種類とレースの構成に応じて、ソフトウェアが登場します。
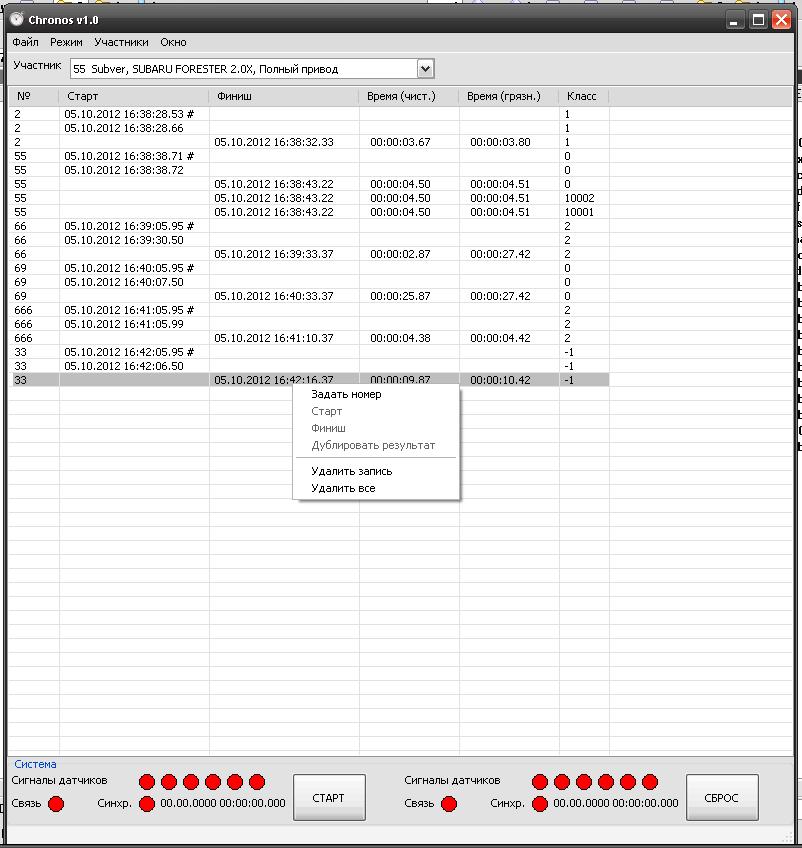
カウントを受信した時点で、受け入れられたタイムスタンプ付きの行が表示されます。ソースに応じて、このマークは「開始」または「終了」セクションに配置できます。その後、同じ番号のマークの時間を計算します。開始から終了までの時間、ラップタイムなど。 .p。
偽陽性の場合(ターゲットまたはインベントリの一部を動物が飛んでいる場合)、テーブルから削除されたばかりのタグは測定結果に影響しません。
結果の計算を自動化するために、各タイムスタンプには、ターゲットを通過した参加者の番号が割り当てられます。 このオプションは、同時にトラック上の車の数とそれらの相対的な位置に関係なく、タイミングを可能にします。
システムが機能しない場合の唯一のオプションは、1つのターゲットを通過するときに船体を部分的にオーバーラップすることです。
ラベルに番号を割り当てた後、結果が再計算され、最終テーブルが更新されます。これは、視聴者用の別の大きなモニターに表示できます。
たとえば、そのように。 このテーブルは、参加者がフィニッシュラインを通過した直後に更新されるため、視聴者向けの結果の「オンラインブロードキャスト」が実現します。
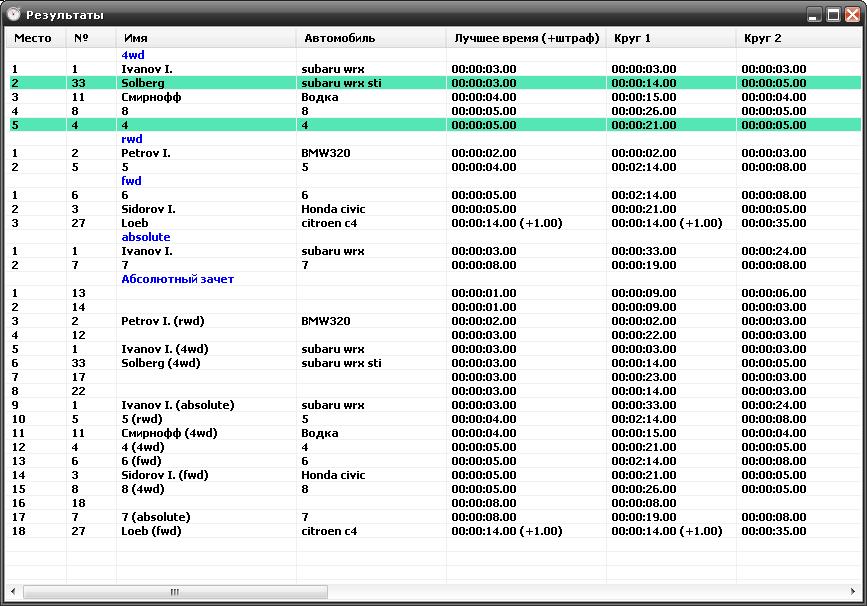
また、ソフトウェアは各参加者のデータを入力する機能を実装しています:開始番号、名前、車のモデル、アスリートが宣言されているクラス。 この表のデータに基づいて、自動モードでの競技の最終リストが作成されます。
このシステムのさまざまな変更(進化の過程で)は、並行スタートのアイスレース、インターバルスタートのダートスプリント、タイムアタックリングレースなど、いくつかのイベントで年間を通じて使用されました。 このシステムは、コンパクトな設計(1つのターゲットのセットがスーパーマーケットのパッケージに入れられる)と操作のしやすさという点で優れています。
2013年7月27日のオムスクでのタイムアタックの第2段階では、オプションがテストされ、結果がリアルタイムで大型モニター(またはテレビ:)に表示されました。 観客と競合他社は満足していました)。
システムの組み立て元のコンポーネント:
-マイクロコントローラー:ATMega8(エミッター)、ATMega128(受信ユニット)
-GPSモジュール:Quectel L10
-ワイヤレスモジュール:Xbee Pro 2
-IRレシーバー:TSOP4038
-ABSプラスチック製のハウジング
-スクラップスタンド
要約:
-距離を移動するのにかかる時間を測定する精度は1ミリ秒以下です(プログラムでは、認識しやすいように0.01に丸められます)。
-展開時間-5〜10分
-バッテリーのセットからの稼働時間-まだ決定されていない、1日で十分なバッテリー-オフィスUPSから7A / hを使用。
-予算は約5〜6千ルーブルです。 自分で部品を購入した場合は、職場でジャンク預金を使用しました
さらに私が望んだこと:この構成では、参加者の数を入力するためにオペレーターの参加が必要です。 ターゲットを通過した参加者の識別を何らかの方法で自動化する必要があります。