安価なヘリコプターの一般的な飛行時間は7〜15分です。 意外と少ない。 私の現在のクアドロコプターは19分飛ぶ。 そして、私は彼のために規制当局とVMGを選択するのに多くの時間を費やしました。ほとんどの場合、不十分なデータに直面して仮定をしました。
飛行時間の鍵は、エネルギー効率の良いプロペラグループです。 これはどういう意味ですか? モーターとプロペラの組み合わせは、トラクションを生成するためにエネルギーを可能な限り効率的に使用する必要があります。 つまり、できるだけ多くの重量を持ち上げて、できるだけ少ないエネルギーを消費します。 ローターモーターの効率は、ワット/グラムで測定されます。 フォーラムには、多くの場合、モーターの重量とマウント、および何らかの種類のパワーメーターで構成されるさまざまなデバイスがあります。 時々、彼らはVMGがどのような牽引力を生み出すかを知るために重みをうまく利用しています。
しかし、測定誤差は通常非常に大きく、変動する推力(モーターが絶えず速度を変える)と、非常に強く浮く力の両方を正確に決定できないという事実から始まります。 その結果、誤差はモーター間の差に匹敵します。
モーターとプロペラのコストが最大で数十倍異なるため、この状況は私には向いていません。もっと支払う価値があるかどうか理解する必要があります。
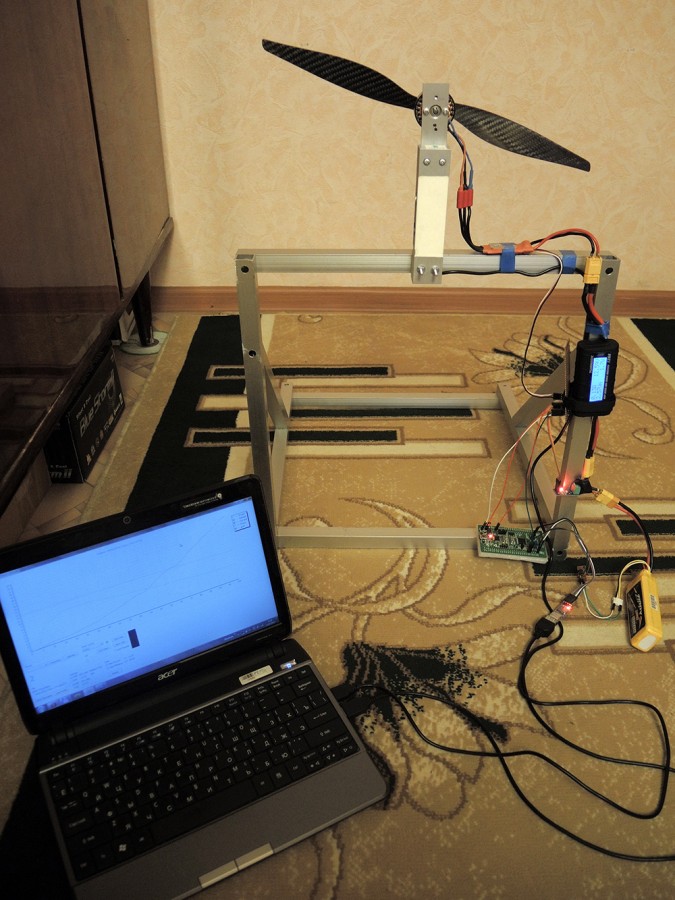
その結果、VMGがマウントされ、そのパラメーターが測定されるテストベンチを構築しました。
 -1gの正確な推力
-1gの正確な推力
0.01Vまで正確なバッテリー電圧
-約0.1A-0.2Aの精度の電流(電流に依存)
どのブログに情報が投稿されているのかわからなかったので、ここに投稿しました。
これらすべてのパラメーターは、速度コントローラーの制御信号の値ごとに1%ずつ削除されます。
さらに、各ポイントのVMGの電力と効率が計算されます。
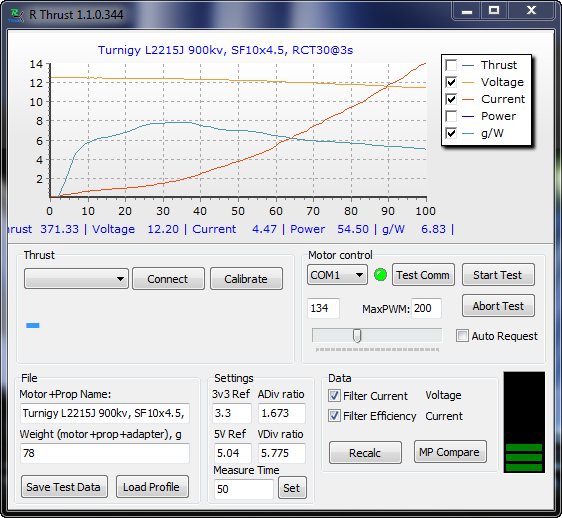
取得したデータに基づいて、チャートが構築されます。 水平-スロットルの位置(パーセント)。 垂直-スロットルスティックの特定の位置で測定および計算された値。
私はソフトウェアエンジニアであるため、スタンドはすべてのテストを完全に自動的に実行します。
プログラムの特徴:
モーターは手動で制御でき、モーターのおおよその評価のためにリアルタイムでデータを観察します。 これは、単にスライダーを動かすか、100〜200の値を手動で入力することで実行されます(1〜2ミリ秒の制御パルス)。 右側には、入力された番号の仮想スロットルスティックの位置を視覚的に示すインジケーターが表示されます。
キャプチャされたすべてのデータに対してノイズフィルタリングが実行されます。
電流と効率のために、追加のフィルタリングも利用できます。 ブラシレスモーターの特性により、データをフィルター処理しない場合、その消費は絶えずジャンプし、グラフにノイズが表示されます。
計量スタンドで使用される基準電圧の値は、分圧器係数と同様に変更できます。
すべての設定は、プログラムによって自動的にiniファイルに保存されます。
各ガスステップの測定時間はミリ秒単位で示されます。 1ステップあたり800ミリ秒を測定することで良好な結果が得られ、モーターテスト全体で約1分20秒かかります。
ESCを押すといつでもテストが停止し、モーターが停止します。
マウスをグラフの上に移動すると、その下にプログラムが「スロットルスティック」の特定の位置のすべてのグラフの値を表示します。
グラフを拡大して詳細に検討し、マウスでドラッグして関心のある部分を見ることができます。
チャートをオフにして他のデータを表示することができますが、マークされたすべてのチャートが収まるように垂直スケーリングが自動的に実行されます。
測定結果は「.mpp」ファイルに保存できます。
また、プログラムの現在のバージョンでは、VMGパラメーターを比較するための関数が登場しています。

VMGの重量を考慮に入れて、異なるエンジンだけでなく、異なるプロペラまたはバッテリーを備えた同じエンジンを比較し、トラクションに対する効率の所定の依存性のグラフを作成することができます。
後で、たとえばExcelで処理するために、データをCSV形式にエクスポートするかもしれません。
私は数十のテストを実施し、興味深い結果を得ました。 例えば、私が推測したように、効率はバッテリー充電の程度に依存します。 すべてのバッテリーが同じように役立つわけではなく、グラフ上では肉眼で確認できます。 すべての速度コントローラーが同等に優れているわけではありませんが、それらの周りには多くの憶測があり、スタンドはコントローラーの違いを明確に確認し、同じコントローラーを工場や代替ファームウェアと比較することさえ可能にしました。
データを分析して、特定のタスクのVMGを選択するための方法論を開発しました。 おそらくこれは、パラメータによる自動選択のためのモジュールの形で実装を見つけるでしょう。 その後、特定のヘリコプターに最も効果的なVMGを選択できます。
ハードウェアは、32ビットマイクロコントローラーSTM32F100RBに実装されています。 ソフトウェア部分は、最新のWindowsで動作します。.netやその他の迷子は必要ありません。
VMGオファーの連絡先をテストしたい方。 このVMGの面白さに応じて、無料でテストを行うことができます。
スタンド機能:
-4Sまでの電圧(6Sまで)
-最大30Aの電流を測定。 (最大50A)
-5kgまでのロッドVMG。
-最大80cmのプロペラがスタンドに収まります。
-標準PWM信号、つまりあらゆる趣味を制御するレギュレータ。
測定プロセス全体は次のようになります(デモのテスト時間を短縮しました)。
電圧と電流に特別な問題はありません。いくつかの詳細だけが必要です。
このようなスタンドを注文して組み立てることも可能ですが、今のところ完成したデバイスを植える時間がないので、スタンドが必要な場合は時間がかかります。すべてのコンポーネントが利用できるわけではありません。
最も重要なこと-habrからVMGを無料でテストし、そのデータを取得したい人をお勧めします。