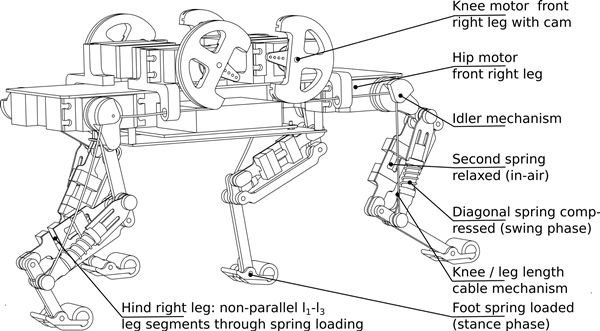
ロボットは、各脚に2つずつ、合計8つのサーボモーターで駆動されます。 大腿骨関節はエンジンに直接取り付けられ、膝関節はケーブルシステムを介して接続されます。 ロボットの脚には、実際の動物の筋肉や腱のように機能するように選択されたバネがあります。 脚の設計が成功したおかげで、ロボットはわずかに起伏の多い地形を走ることができます-機械的自己安定化によってのみバランスを保ち、開ループモードで動作します。
マサチューセッツ州の大型4脚ロボットとは異なり、チーターにはユニークな複雑な部品はほとんど含まれていません(MITチーターは特別に設計された電気モーターを使用しますが、Boston Dynamicsチーター設計に関する公開データは事実上ありません)。 設計者によると、このロボットは非常に安価で手頃な価格で安全であるため、貧弱な機関や単一の愛好家によるロボット工学分野の研究の理想的な候補となっています。
ロボットに関する詳細な情報を含む科学論文は、 The Robot Journal of Robotics Researchに本日公開されます。