
彼は、冷蔵庫からビールをあなたに届けませんが、彼はあなたの個人的なオペレーターかもしれません。
Swivlは、カメラまたはiPhoneが置かれる小さなプラットフォームであり、カメラの目をあなたの方に向けることで、あなたの動きを監視します。 このデバイスは非常に具体的であり、ホームガジェットとしては、Skypeで頻繁に会話すると同時に部屋を歩き回る人々にのみ適していることに同意します。
しかし、そのようなデバイスは、講師、ビデオポッドキャスター、あらゆる種類の極端なプレイヤー、つまり、自分で撮影する必要があるが、まだ個人的なオペレーターを持っていない人々に高く評価されました:)
このデバイスは、Grishin Robotics(Dmitry Grishinの会社、Mail.Ru GroupのCEO)が、西洋のロボットスタートアップをサポートするために、ロボットの第2バージョンの生産にかなりの投資を行ったことに興味を持ちました。
Swivlの第1世代の資金はKickStarterではなくIndieGoGoで収集されたため、私は少し間違ったタイトルを書きました。 そして、それはまったくSwivlではなく、単にSatarii Star Accessoryと呼ばれました。 それにも関わらず、お金は無事に集められ(そのようなプロジェクトと制作のための2万ドルはペニーですが)、ガジェットはリリースされました。 かなり長い時間が経過し、彼は私たちのBox Overviewのテーブルに現れました。
►外観
いつものように、ボックスから始めましょう:

おそらく、ボックスは、内側の部分が完全に移動せず、灰色の端面が面しているという点でのみ珍しいです。 しかし、彼が最後にロープの形の釘や松葉杖を使わずに箱を開けるのは非常に便利です。 サイド-構成の説明:

一番下は保険です。 まあ、念のために、突然誰かが理解しませんでした:
上記-サポートされているデバイスがリストされています:

そして背後-主な機能:

ボックスを開くと、最初にデバイスの目的を説明する碑文が表示されます。

そして、デバイス自体:

ところで、パッケージはかなり禁欲的です:

ちなみに、碑文にも関わらず、キットにはiPhoneが入っていました:)それに加えて、マニュアル、プラットフォーム自体、首にレースのマーカーがありました:

三脚マウントでカメラをインストールするためのアダプターとMicroUSBケーブルもありました。 私が理解しているように、後者はデバイスに電力を供給するためだけに使用されます。
プラットフォームは次のようになります。

フロント-電話またはカメラ用のマウント:

動作モードでは、それは上がります:

そして、ビデオを記録できるものをインストールします:

中央の緑色のスポットは、2つのボタンとその横にある2つのLEDです。

側面には2つの単三電池用のスロットがあります。

背面にはMIcroUSBと30ピンコネクタ付きのケーブルがあります。

ケーブルはスタンドに巻き付けられ、必要に応じて巻き戻されて電話に接続されます。

下部には、標準の三脚に取り付けるための情報とマウントがあります。

これらのすべての周囲には、最も密度の高い材料をしっかりと保持する黒いゴムのストリップがあり、鋭い操作中にデバイスが動くのを防ぎます。
マーカーマーカーは、プラットフォームの小さなコピーのように見えます。

前面には、LED付きの同じ2つのボタンがあります。

下-バッテリーコンパートメント(2個のAAA):

後ろの壁には、情報が入ったステッカーと衣服用のクリップがあります。

上部はプラスチックで覆われており、その下にはLEDとマイクが隠れています。

►仕事
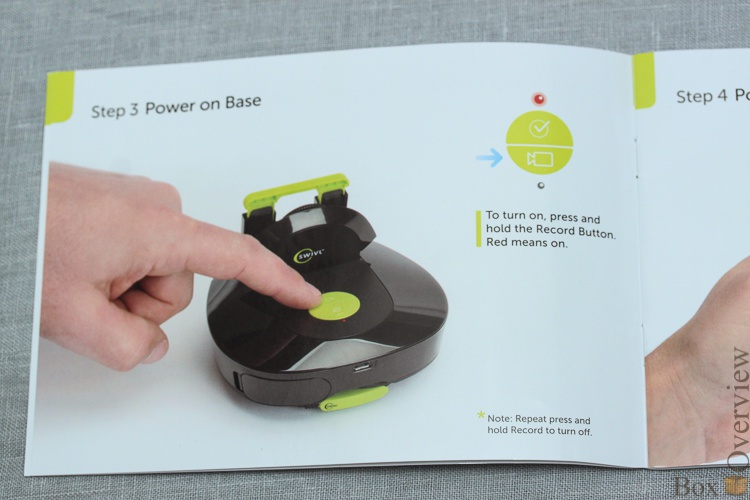
まず、プラットフォームとマーカーの両方を有効にする必要があります。 指示が示すように、これはビデオカメラの画像でボタンを長押しすることで行われ、その後赤いLEDが点灯します:
だから:

センサーで同じ操作を行うと、LEDの色が緑色に変わります。

これで、マウントに電話をインストールし、録音を有効にできます。
また、プラットフォームはセンサーの後に自動的に回転し、常に所有者の視界を保ちます。 同時に、Swivlは高さを調整するのに便利なように、三脚に取り付けることができます。

ただし、iPhoneをワイヤーで接続し、AppStoreから特別なプログラムをダウンロードする方がはるかに便利です。

その後、ベースとセンサーの充電レベルを制御することが可能になります:

回転速度(通常のオブジェクトまたはトラッキングスポーツオブジェクト-オペレータがオブジェクトの後にすばやく回転するモード)および垂直面での自動回転を調整します。

または、追跡をオフにして、「セキュリティカメラ」モードに置き換えます。一方の方向と他方の方向にゆっくり回転します。

しかし、プログラムの主な利点は設定ではなく、マーカーマイクから受信した音声でビデオを書き込むことができるという事実です。 マーカーが音源に可能な限り近い位置にあるため、オペレーターが部屋にどれほどうるさくても、スピーカーの声の音は常に良好です。
マウントはユニバーサルであり、両方の垂直取り付けをサポートしています。

たとえば、ビデオ会議やSkypeチャットの場合。 そのため、画像を生成するリアカメラを使用するための水平設置は、はるかに優れています。

マウントを使用すると、ほぼすべてのカメラをインストールできます。

その重量が160グラムを超えてはならないという条件で-DSLRとシステムカメラのほとんどは消えます。 確かに、私は600グラムの重さのLumix G2を装着しましたが、プラットフォームは携帯電話ほど速くはありませんでしたが、私の後ろを移動しました。
Iphones.ruを使用して同僚のビデオレビューで撮影の例を見ることができます。
その間、私たちはもっと興味深いことに対処します-検死。 もっと正確に言えば、朝の3時に解体プロセスの写真を撮るのを完全に忘れてしまったので、内部です。 私は読者のほとんどがそれを分解できないことを望んでいるので、これはだれも混乱させないと思います。 ところで、解体はかなり自明ではなく、今は何かが壊れるという絶え間ない気持ちに満ちています。 大丈夫!
►内部
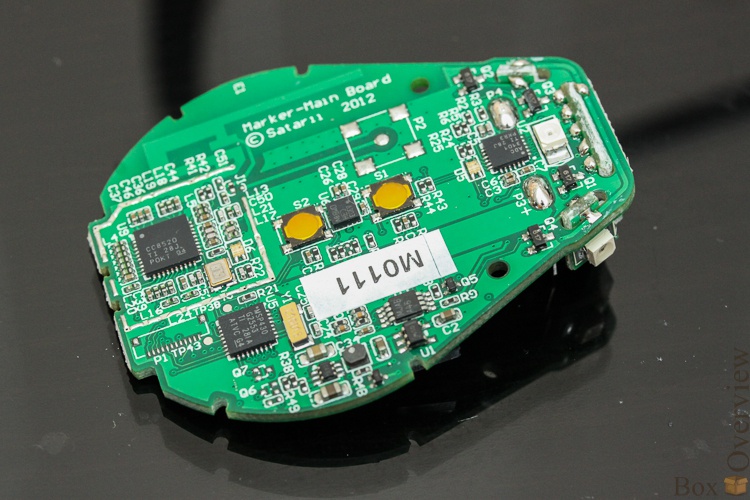
これがデバイスのメインボードです。

STのコントローラー、すなわちSTM32F105が中央処理装置として使用されました。 おそらく、USBインターフェイスが組み込まれているために選択されました。

注目すべきこと-コントローラーのUSBは30ピンコネクターと背面のMicroUSBコネクターの両方に接続されています。 もちろん、同時にではありません-そのような素晴らしいマイクロ回路は、スイッチングを制御します(2本の抵抗器の隣に足がない正方形のケース)。これは、差動ラインマルチプレクサです。
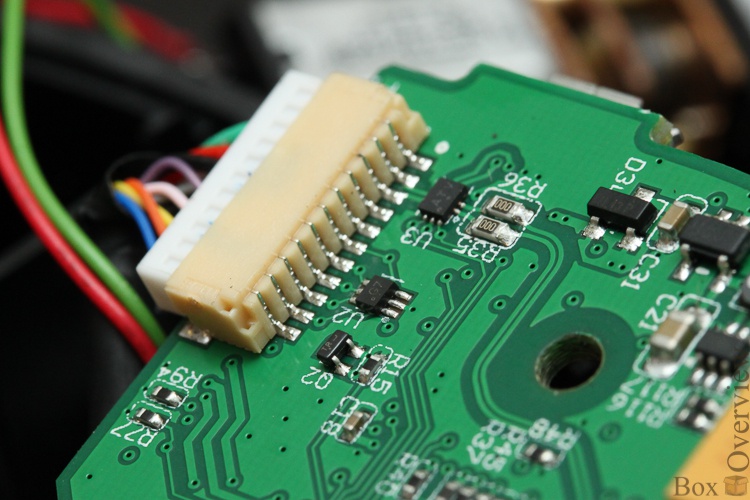
したがって、ロボットをコンピューターに接続しても何も起こりません。切り替えるには、スイッチにコマンドを与える必要があります。 このようなソリューションは通常の使用では使用されないため、ファームウェアまたは一部のサービス機能を更新するために行われたと想定しています。
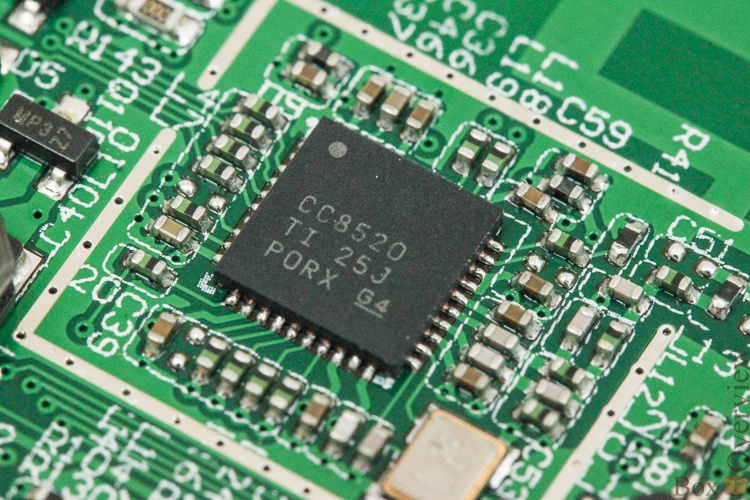
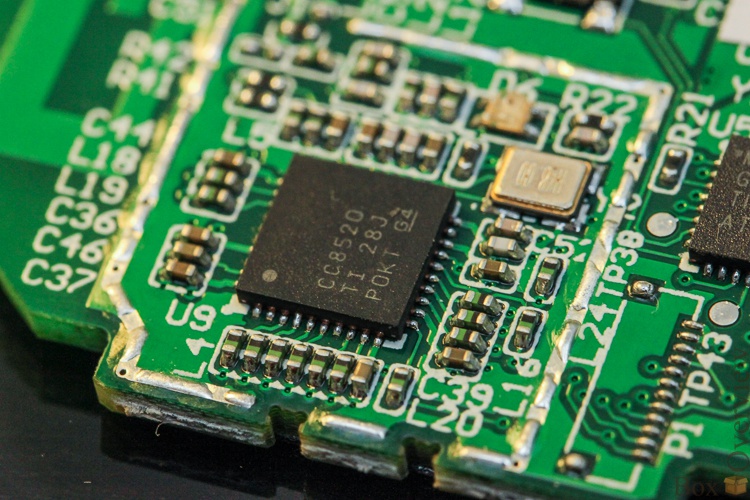
近くには、テキサスインスツルメンツのCC8520の2チャンネルワイヤレスオーディオトランシーバーがあります。これは、マーカーからのオーディオ伝送を提供して、高品質の録音を実現します。
私は彼の兄弟が遠隔にいると思う。 もう少し高い-TIからのステップアップもあります。これにより、コントローラーとモーターの動作に2〜3ボルトのバッテリー電源5が必要になります。

反対側のコネクタの隣には、デュアルモータードライバーがあります。

これは、スタンドを回転させるモーターの外観です。
ちなみに、スタンドは任意の方向に任意の回転数で回転できます-円を描いて歩き回れば、すべてが機能します。
そして、カメラを傾ける役割を担う2番目のエンジンは次のとおりです。
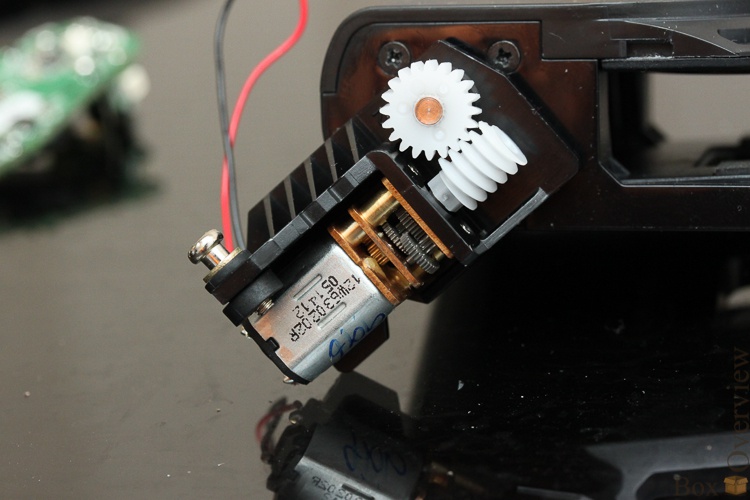
これは、金属製のギアボックスを備えたエンジンです(@DIHALT はそのようなものについて書きました )。
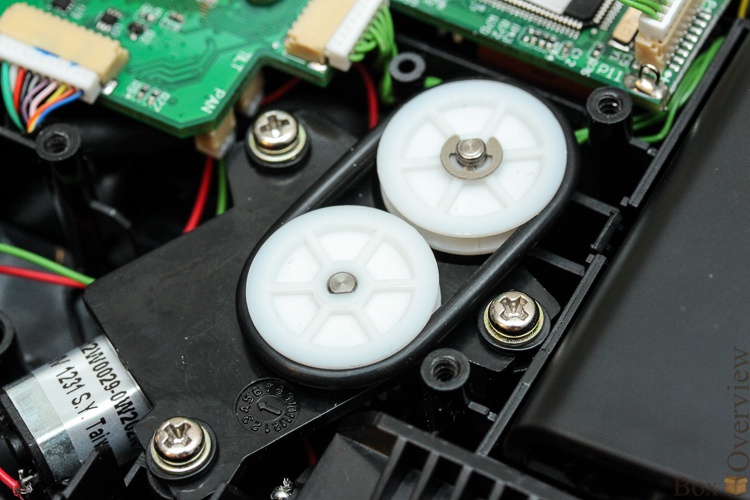
回転プラットフォームには光学センサーもあります。
そして、それらの相互的な部分はミラーです:

プラットフォームの位置を次のように示します エンジンには位置センサーがありません。 それに応じて、ロボットはプラットフォームが横になっている状態から上昇しているかどうかを判断します。プラットフォームが下降した状態では動作しません。
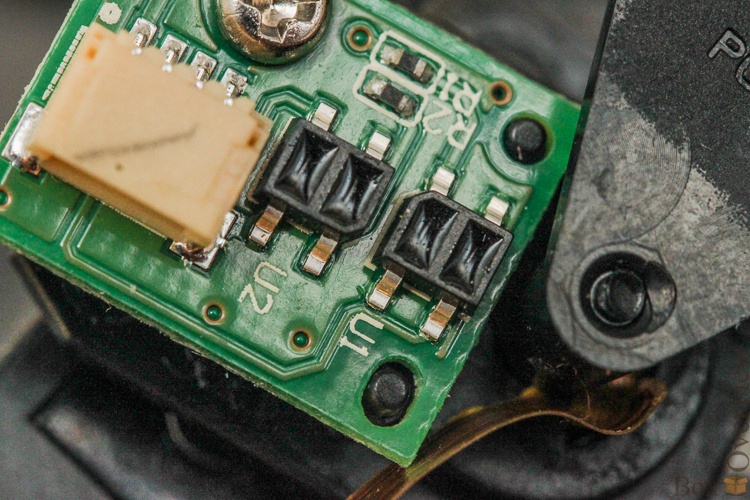
回転プラットフォームの下部を分解します。そこには、マーカーを監視するセンサーもあります。

大きなプラスチックレンズを備えた赤外線透過プラスチックの料金:

ボードの背面には、いくつかのオペアンプがあります(さらに、低ノイズおよびプリエンプティブ)。
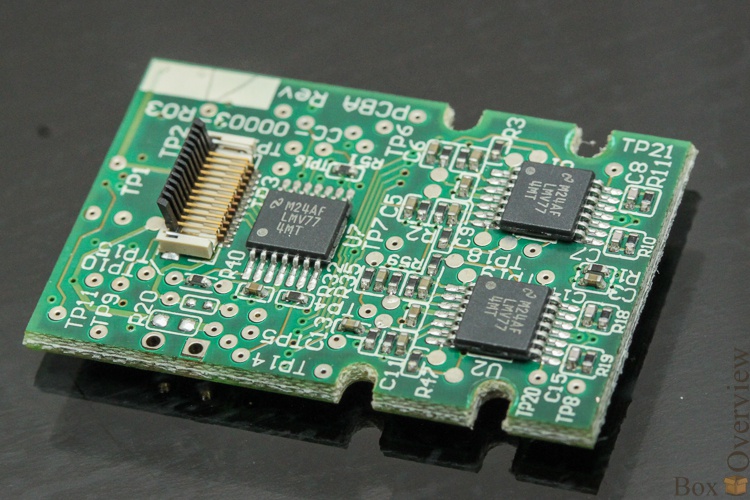
ボードを裏返し、レンズを取り外し、OPA!

(私が思ったように)別個のフォトダイオードの代わりに、そのような「マトリックス」がありますが、わずか4ピクセルです。 どうやら、これはセンサーの感度を高めるために行われたようです。 また、追跡オブジェクトも垂直方向に移動する場合、左右方向だけでなく上下方向にも4つのピースが必要です。
ところで、電話のサイズの調整メカニズムはどのように機能しますか。 この位置にあるスレッド上のホイール:

しかし、これで:

それでは、リモートコントロールの面倒を見てみましょう。 一般的な正面図:
一般的な背面図:

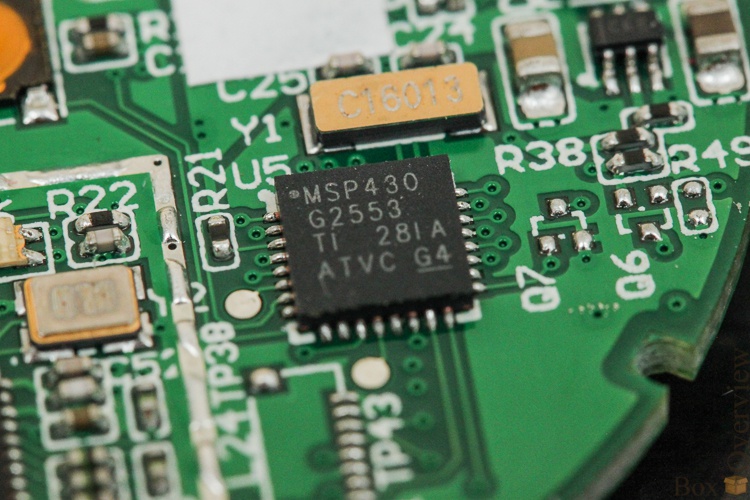
コンポーネントのサプライヤとして、メーカーは望の恒常性に従います-プロセッサはTIのMSP430を使用します。 まあ、彼らはそれが好きです。 TIも好きです。
予想通り、CC8520の双子の兄弟:
上部には多くの赤外線LEDとマイクがあります。
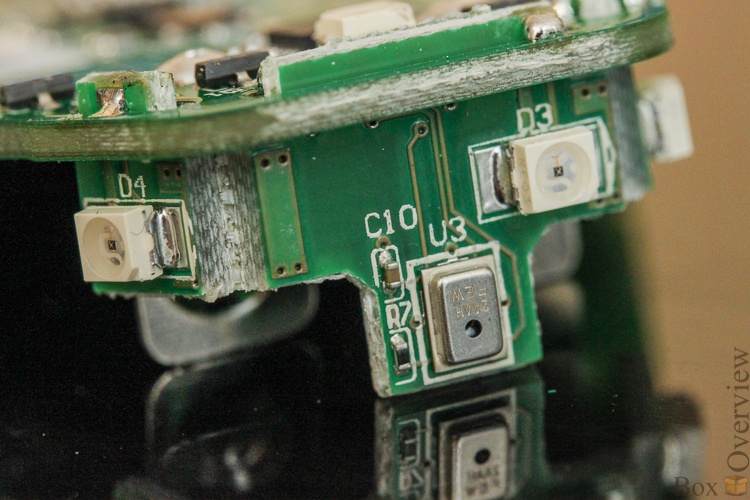
天板にはもう1つのLEDが残っています。

近くのTLV320ADC3101-ワイヤレスオーディオ伝送で投獄されたADC。 TIからも。
参照資料
 iphones.ruからのレビュー
iphones.ruからのレビュー
 公式サイト
公式サイト
 第二世代コンソールのキックスタータープロジェクト
第二世代コンソールのキックスタータープロジェクト
 Mail.Ru Group CEOがSwivlビデオロボットに50万ドルを投資
Mail.Ru Group CEOがSwivlビデオロボットに50万ドルを投資
Habrahabrのアカウントをお持ちでない場合は、 BoxOverview.comの記事を読んでコメントすることができます。