
私はほぼ半年間、趣味としてクアドロコプターを練習しています。 私の最後のデバイスでは、カメラ(GoPro HD Hero 2)とビデオトランスミッターを吊り下げて、ビデオグラスを通してその上を飛んでいました。 しかし、テクニックは完璧ではありませんでした。 アルミニウムビームを使用した古いX525フレームは、1.8 kgの重量に対して十分に安定していなかったため、クアッドコプターは空中で揺れ、すべてがまとまりました。 したがって、すべてのニーズを考慮して、自分で設計したフレームに新しいクワッドを構築することが決定されました。 そして、ニーズは次のとおりでした。
- すべての機器の下に置きます。 新しいフレームには、カメラ(写真のプロペラなし)、トランスミッター、OSD、大型バッテリー、および制御電子機器(フライトコントローラーボードとGPS)用の十分なスペースが必要です。
- 安定性。 フレームはできるだけ硬くする必要がありますが、同時にモーターをカメラから防振する必要があります。
- 外観 私はヘリコプターを見てみたいと思っていたので、初心者には一般的ではありませんが、標準的な十字形のフレームにワイヤーとネクタイの塊を作りました。
- (セカンダリ)重量。 X525ベースのヘリコプターは、カメラとバッテリーで1.8 kgの重量がありました。この数値をわずかに減らし、同時に1つのバッテリーで飛行時間を長くしたかったのです。
困惑してこれがどのように見えるかを決定して、LibreCADをインストールして動作するように設定しました。
開発
ヘリコプターの全体的な形状のインスピレーションは、 Spidex v2フレームでした。 同じレベルのコンポーネントの位置が好きでした-正面のカメラ、次に中心が前方に移動し、バッテリーが背面から吊り下げられました。 このようなスキームにより、プロペラが視野に入らないようにカメラを配置できます。 彼らはまた、防振の良い方法を思いつきました-カメラとバッテリーは、ゴム製絶縁体を使用して中央に取り付けられている2つの水平パイプから吊り下げられています。 バッテリーの質量は、カメラに伝わる振動を減らすのに役立ちます。 まあ、そのようなヘリコプターは、私の意見では、非常にまともです。
しかし、Spidexは私のニーズに完全には適合しませんでした。 まず、アルミニウムチューブを使用しています。アルミニウムチューブは、すでに一定の負荷がかかっているため、曲がっており、事故が発生することさえありません。 次に、ルームメイトから無期限に借りたGoPro Hero HD2カメラを使用します。保護ハウジングのないヘリコプターに取り付ける準備ができていないため、Spidexはこれを提供していません。
つまり、Spidexから、一般的なレイアウトのみを使用することにしました。 ファイバーグラスプレートとクランプ付きカーボンパイプを使用して、フレームを自分で組み立てることにしました。 おなじみの家には、必要な形状のプレートを切断できるフライス盤があります。 このまさにフォームを作成するために、私はLibreCADに座って、ここに私が得たものがあります:
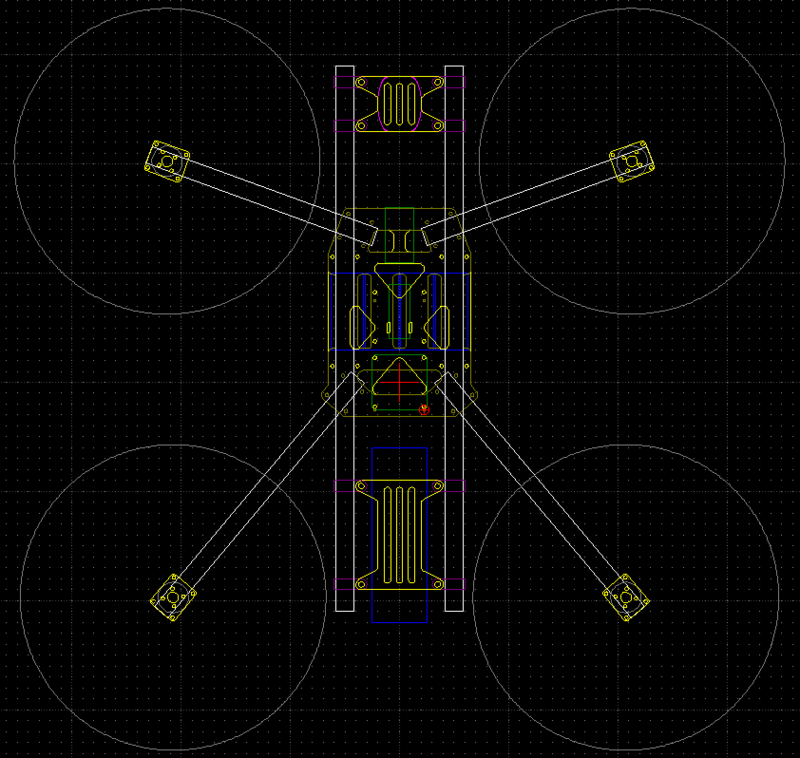
上からのヘリコプターの一般的なビュー
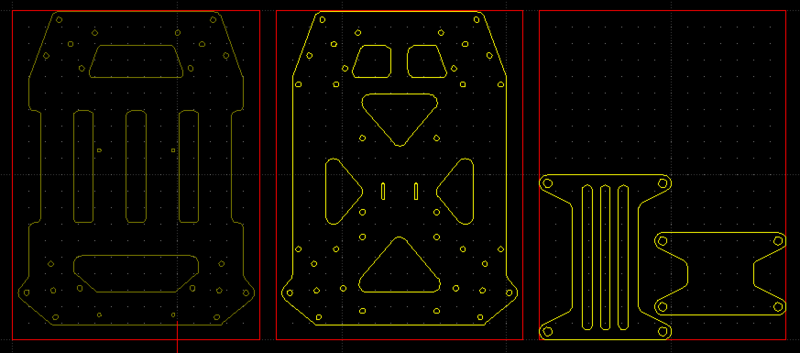
センタープレートとカメラおよびバッテリーホルダー
この結果に満足し、私は設計図を友人に手渡し、地元の(ドイツの)オンラインストアで必要な詳細をすべて注文しました。 特に、カーボンチューブ(16x14mm、メーター長、3個が購入されました-フレームには2つのフレームが必要です、準備ができています)、適切なネジ/ナット(FlyduinoのFCP HLセットから)と一緒にそれらのクランプ、敷設用のワイヤーモーターへのチューブ、防振装置(M3の下のサイレントブロック)、および小さなものの束。
前のヘリコプターのすべての電子機器を使用することにしました。 2つのクワッドは私を必要とせず、すべてが正常に動作します-なぜ新しい部品を購入するのですか? 前のモデルから移行した同じ電子機器およびその他の詳細のリスト:
- モーター:4x NTM 28-30 750kv
- モーターコントローラー:4x HobbyKing Blue Series 30A、SimonKファームウェア付き
- プロペラ:4x Graupner E-Prop 11x5
- コントロールボード:Crius MultiWii SE v0.1、MultiWii 2.2
- バッテリー:Turnigy Nanotech 4S 4500mAh 25-35C
- カメラ:GoPro HD Hero2
- ビデオ送信機:ImmersionRC 5.8G 25mW
- アンテナ:Clowerleaf 5.8G、地元のフォーラムの職人によるDIY
- OSD:MultiWii 2.2用のKVチームOSDファームウェアを備えたMinimOSD
- GPS:Drotek I2C GPS
- ラジオ:Graupner HoTT GR-16、私の送信機の下(MX-16)
組立
数日後、すべての部品が配置され、組み立てを進めることができました。
23枚の写真でヘリコプターを組み立てる
詳細がテーブルにレイアウトされ、組み立てが開始されます。 注文は長続きしませんでした...

開始するために、22cmと28cmの希望する長さのチューブを見ました。4つすべてが1メートルのチューブから切断されました。 細い歯の金属のやすりは非常にうまくいきます。

下部中央のクランプを試してみます。

センターは、すべてが適切に適合するかどうかを確認するために組み立てられます。 そうそう。

フレームの他のすべての部品をねじ込みます。 ほぼ完了したように見えますか? どんなに。

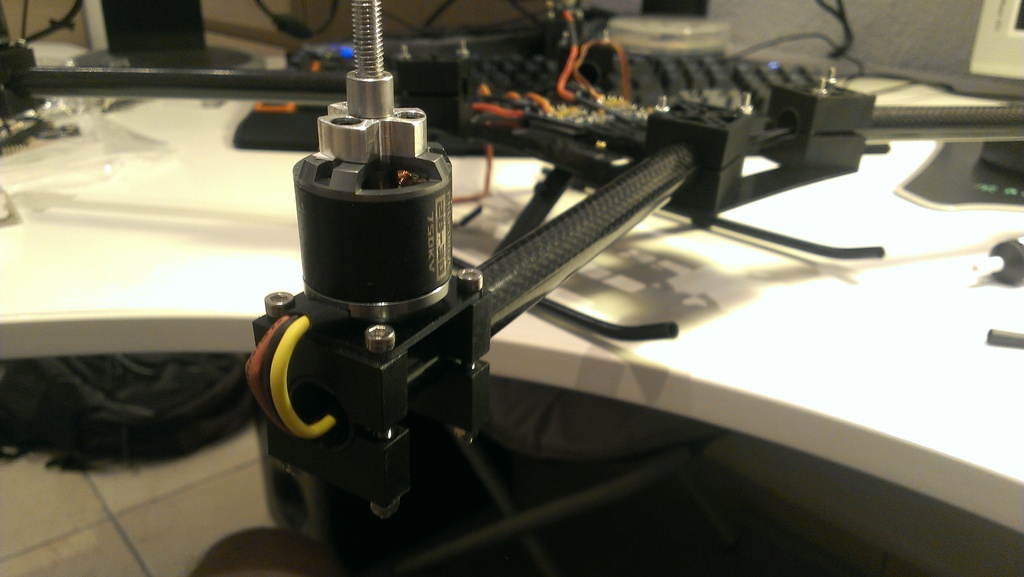
モーターの軸は切断する必要があります-それらは背面から突き出ており、チューブの上部への取り付けを防ぎます。 金属のおがくずが内部に入るのを防ぐために、モーターをダクトテープで接着します...

...そして彼のドレメル、ドレメル。 ドレメルは、バターナイフのように3mmの軸を切断します。 主なことは、安全メガネを忘れないことです。

モーターコントローラーから熱収縮を取り除き、新しいワイヤーをはんだ付けします。
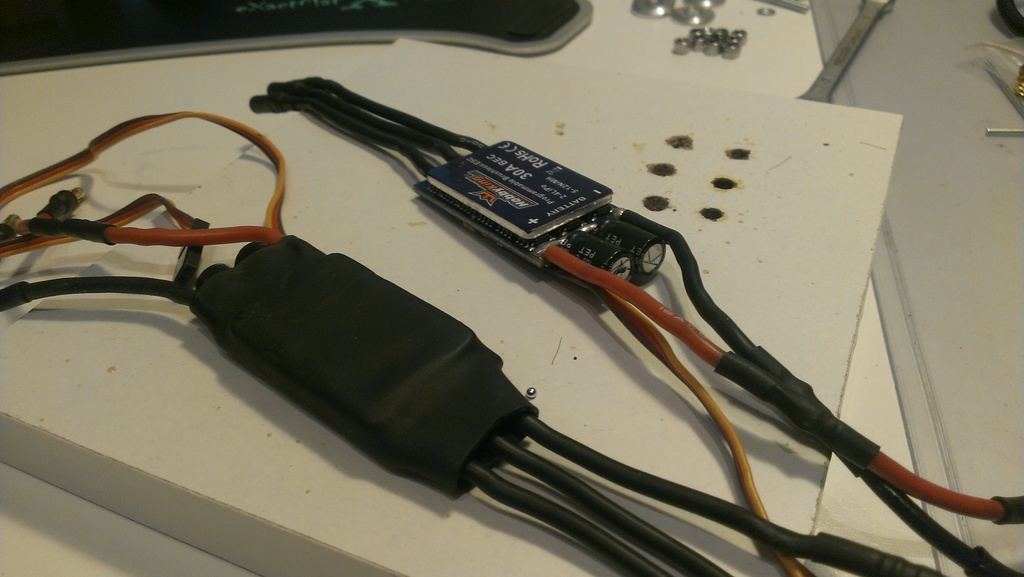
ワイヤーは希望の長さにカットされます。 モーターコネクタをはんだ付けします。 モーターごとに3つのフェーズがあり、dofigaをはんだ付けする必要があります-これはクワッドです。

コントローラーを下半分のフレームに配置します。
モーターを固定し、ケーブルをチューブに通します。 すべてが計画通りに進んでいます!
すべてのケーブルが配置されたら、新しい熱収縮でコントローラーを隔離します。

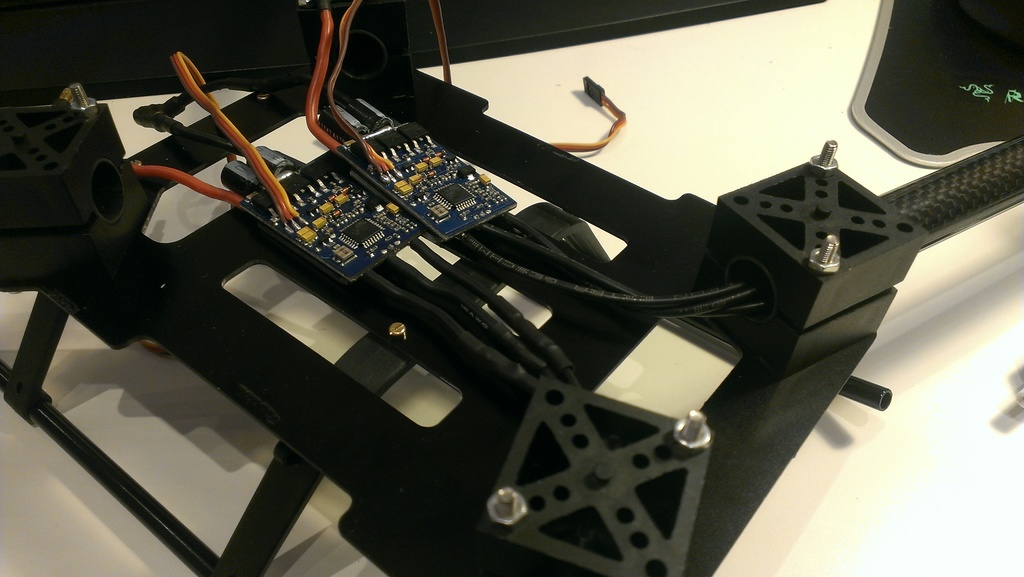
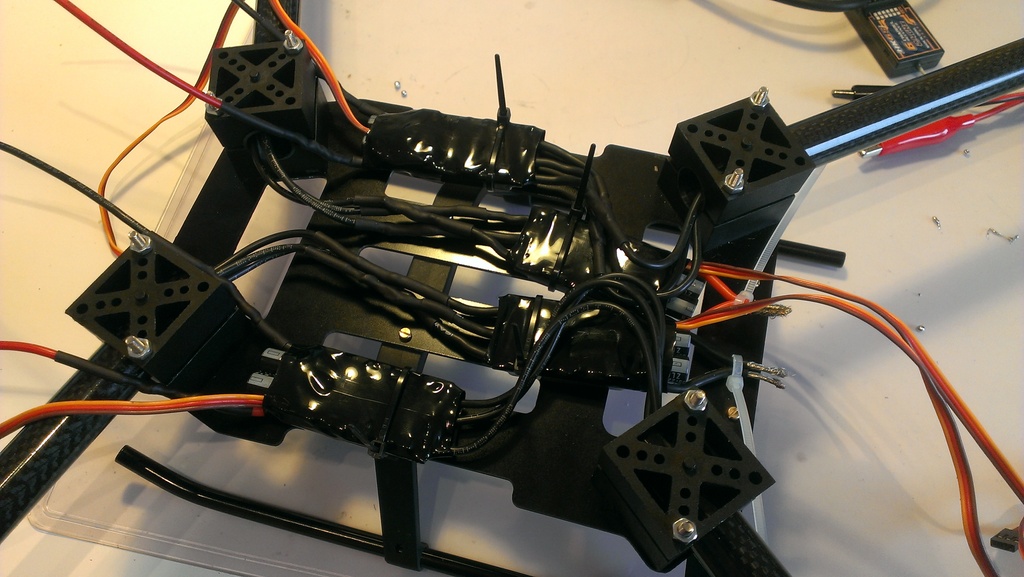
最終位置にモーターコントローラーを設置します。 配線が多すぎますが、かなりきれいです。
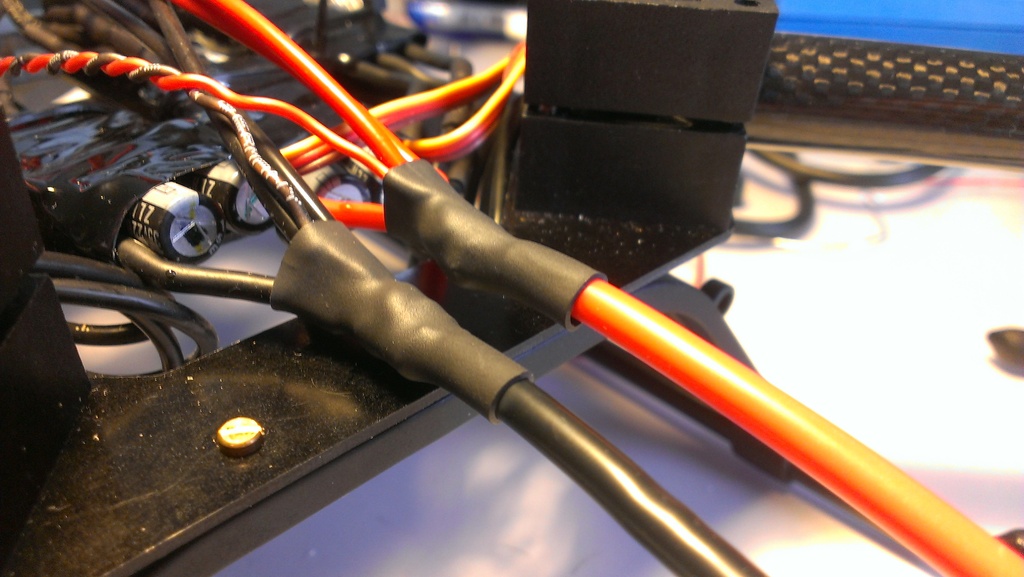
バッテリー配線、RCExplorerメソッド。 まず、バンドルを使用してコントローラーからワイヤーを収集します...
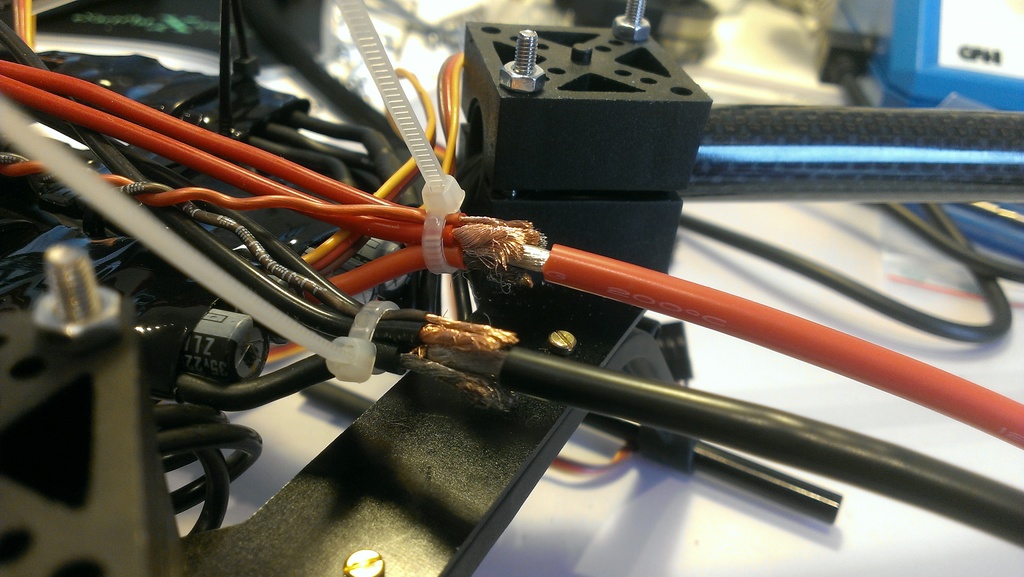
...細い銅線で一緒に引っ張ります...
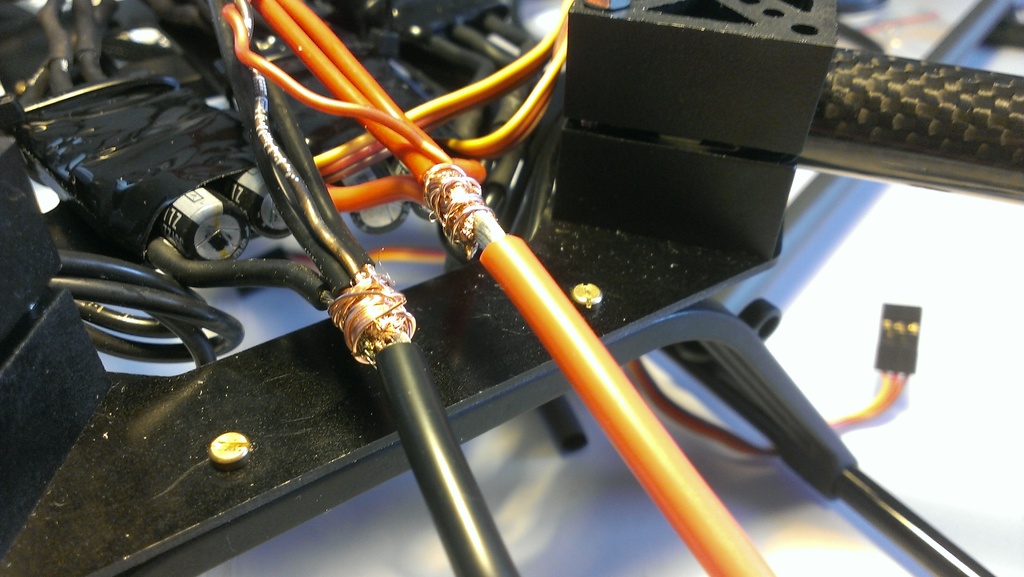
...はんだ付けし、熱収縮で絶縁します。 化合物は機械的に強く、導電性が高い。
最終組み立てを試みます:すべてが一致します! 上部フレームはまだねじ込まれておらず、ちょうど上にあります。

中央に制御電子回路(コントローラーとGPS)があり、カメラとバッテリーが取り付けられた防振チューブを備えた上部フレーム。
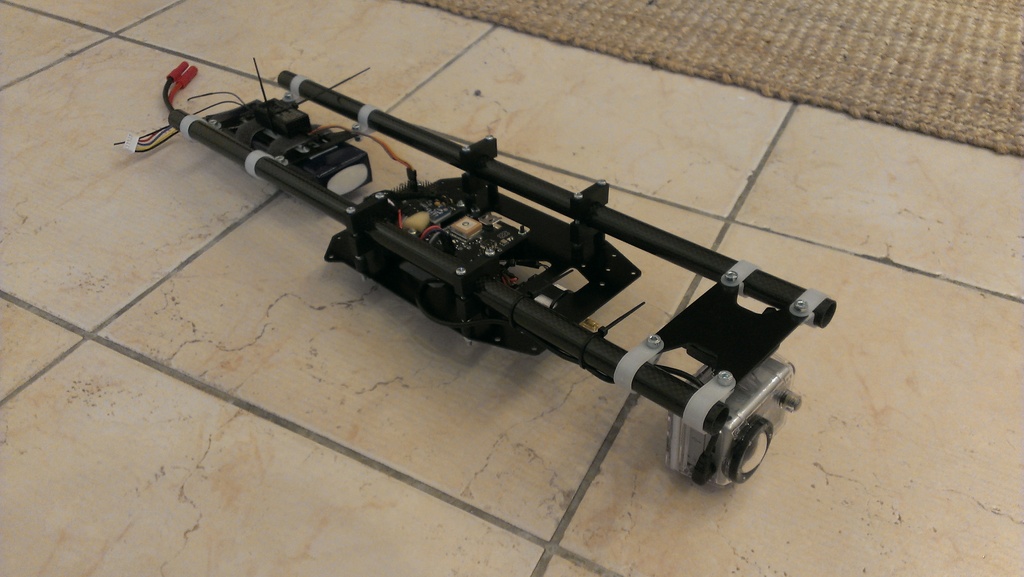
上部中央の下側のビデオ機器:カメラからのビデオケーブルはMinimOSDに行き、そこでフライトコントローラーからの情報がビデオトランスミッターに重ねられます。
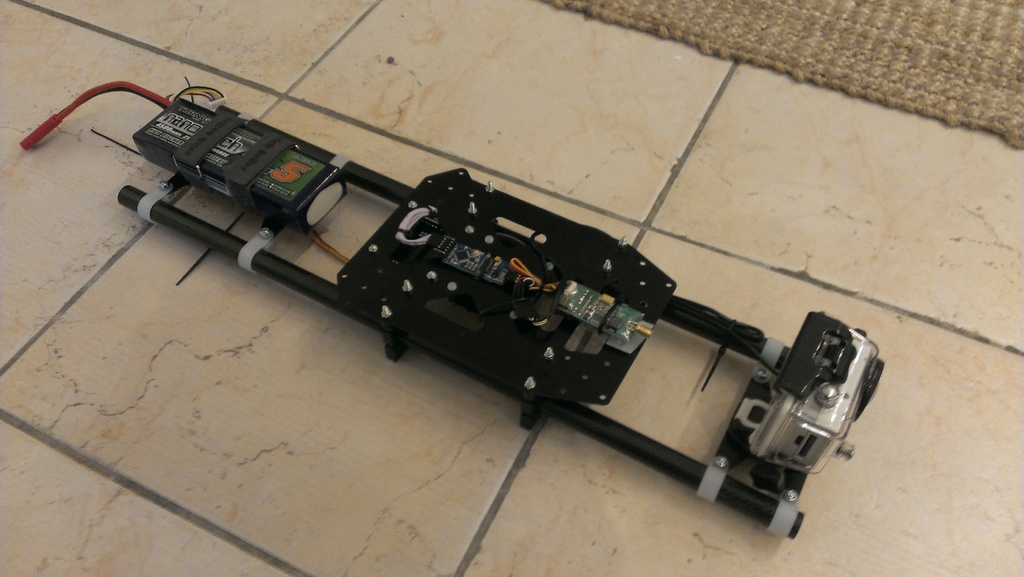
下部フレームは上部を取り付ける準備ができています。 一時的なナットを緩めたときに中央のクランプがバラバラにならないように、モーターを上げます。

上半分のフレームを取り付けて固定します。 ナットを締め、すべてのワイヤーを接続して......

...完了!
開始するために、22cmと28cmの希望する長さのチューブを見ました。4つすべてが1メートルのチューブから切断されました。 細い歯の金属のやすりは非常にうまくいきます。
下部中央のクランプを試してみます。
センターは、すべてが適切に適合するかどうかを確認するために組み立てられます。 そうそう。
フレームの他のすべての部品をねじ込みます。 ほぼ完了したように見えますか? どんなに。
モーターの軸は切断する必要があります-それらは背面から突き出ており、チューブの上部への取り付けを防ぎます。 金属のおがくずが内部に入るのを防ぐために、モーターをダクトテープで接着します...
...そして彼のドレメル、ドレメル。 ドレメルは、バターナイフのように3mmの軸を切断します。 主なことは、安全メガネを忘れないことです。
モーターコントローラーから熱収縮を取り除き、新しいワイヤーをはんだ付けします。
ワイヤーは希望の長さにカットされます。 モーターコネクタをはんだ付けします。 モーターごとに3つのフェーズがあり、dofigaをはんだ付けする必要があります-これはクワッドです。
コントローラーを下半分のフレームに配置します。
モーターを固定し、ケーブルをチューブに通します。 すべてが計画通りに進んでいます!
すべてのケーブルが配置されたら、新しい熱収縮でコントローラーを隔離します。
最終位置にモーターコントローラーを設置します。 配線が多すぎますが、かなりきれいです。
バッテリー配線、RCExplorerメソッド。 まず、バンドルを使用してコントローラーからワイヤーを収集します...
...細い銅線で一緒に引っ張ります...
...はんだ付けし、熱収縮で絶縁します。 化合物は機械的に強く、導電性が高い。
最終組み立てを試みます:すべてが一致します! 上部フレームはまだねじ込まれておらず、ちょうど上にあります。
中央に制御電子回路(コントローラーとGPS)があり、カメラとバッテリーが取り付けられた防振チューブを備えた上部フレーム。
上部中央の下側のビデオ機器:カメラからのビデオケーブルはMinimOSDに行き、そこでフライトコントローラーからの情報がビデオトランスミッターに重ねられます。
下部フレームは上部を取り付ける準備ができています。 一時的なナットを緩めたときに中央のクランプがバラバラにならないように、モーターを上げます。
上半分のフレームを取り付けて固定します。 ナットを締め、すべてのワイヤーを接続して......
...完了!
ビルド結果:

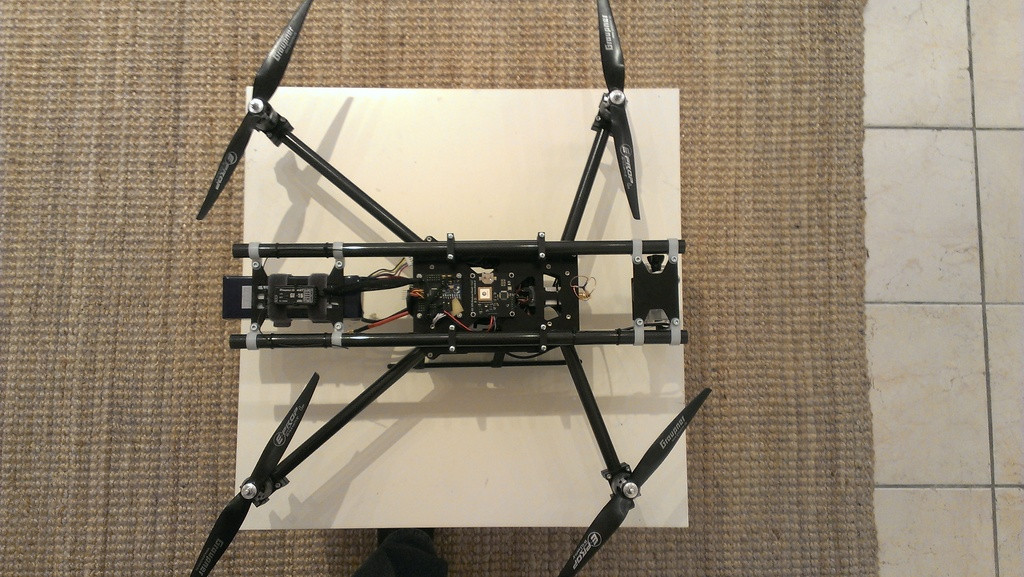



これがそのようなヘリコプターです。 私が不満なのは体重だけです。 チューブ用のクランプとナット付きの膨大な数のネジにより、設計を容易にすることはできませんでしたが、総重量は1950グラムに増加しました。 しかし、これはまだドライブの力の範囲内です-私の疑問は最初の飛行中に完全に払拭されました。
初飛行
最初の飛行からの感覚:素晴らしい! ヘリコプターは空中に根ざし、視覚的にもFPVによっても完全に制御されます。 1回の充電での飛行時間は14分であり、パワーリザーブは完全に快適な飛行と操縦のために十分以上です。 私はまだコントローラーの設定を少し掘り下げています-GPSはうまく機能しません(実際には位置を保持せず、帰宅は機能しません)。 。
一般的に、プロジェクトは成功しました。 今後数週間は、フライトと撮影にヘリコプターを積極的に使用します。
質問、コメントなど ようこそ