エントリー。
今日、私たち一人一人は非常に「厚い」チャンネルを持つ専用ラインを持っています。 また、ほとんどの人がwifiルーターを持っています。そして、私たちのほとんどは家を出るときにそれをオフにすることを気にしません。 そして本当に、なぜですか? WiFi保護プロトコルは非常に信頼性が高く、ルーターの消費はごくわずかです。 したがって、あなたの家はしばしばまたは常にオンラインです。 しかし、これは私たちに何を与えますか? トレントダウンロード、個人の多様なサーバーなど
私たちの中で特に進歩したのは、さまざまな「グッズ」とインターネット経由のリモート監視を備えたスマートホームです。 これは正しいが高価なソリューションです。 しかし、これはすべてあなたの家にのみインストールするのが理にかなっています。 リムーバブルの場合、これはばかげています。
それにもかかわらず、パラノイア、過敏性、または同様の要因の悪化(古典的な状況を思い出してください-「アイロンをオフにしたことがありますか?」) 特に長期的に。 問題が発生します-アパートが常にオンラインであることがどのように判明しますが、私は何も見たり制御したりしません。 変です。
質問に対する最も予算的な解決策は、ウェブカメラだけを置くことです。 しかし、1つでは不十分であり、開発されたビデオ監視ネットワークはすでに深刻なインフラストラクチャであり、それほど安くはありません。 さまざまなオプションが検討され、すべての長所と短所が比較検討されました。 まだウェブカメラを1つ持って、ホイール(またはトラック)を取り付ける最も簡単な方法であることが判明しました。
この場所で読者の意見が2つの大きなグループに分けられることをよく知っています。 最初のグループはここに同様のプロジェクトがたくさんあると主張し、2番目のグループはこれを実装するにははんだごてと友達になる必要があると主張します。
これが、この資料の主な目標である、エレクトロニクスのジャングルに飛び込むことなく多くの人がアクセスできるレベルでこのプロジェクトを安価に実装する方法です。

将来的には、予算は70ドルから常識の限界まで最小限であると言えます。 そして、それはコンポーネントがどれだけアクセスしやすいか、そして特定の人がどれだけth約するかに大きく依存します。 この値札は、ドネツク(ウクライナ)で形成されましたが、進歩的な都市ですが、特定のものをどこで手に入れるかは依然として問題です。

コンポーネント。
Wifiボットのすべてのコンポーネントは、価格/可用性の比率に基づいて選択されました。 洗練されたArduino構造の愛好家向けの既製の高価なプラスチックがすぐにマークされました。 そうでなければ、予算は月面探査機の予算の半分になります。
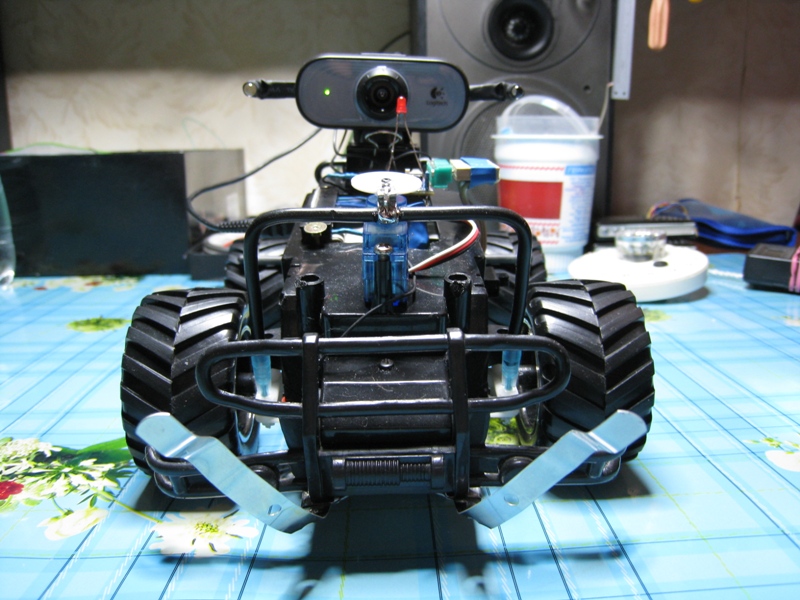
1. シャーシ。 ここではすべてが簡単です-私たちはラジオコントロールで好きな最初の「ジープ」を取ります(私たちはそれを捨てるので、それを壊すことができます)。 原則として、正面の「橋」に行進エンジン(前進する)と回転エンジンが既にあります。 RU(無線制御)の回路を自由に引き裂いて、エンジンへの配線とバッテリーコンパートメントからの配線のみを残してください。 一般的な開発では、モーターのバッテリーを突いて、特定の極性でどこに回転するかを確認できます。 これがカートの動きです。

図 1シャーシ。
2. 脳。 ビデオストリームとコマンドをシャーシにブロードキャストするためのデバイス。 シャーシを制御するには、wifiとポートを備えたデバイスが必要です。 また、ラズベリー(Raspberry Pi)がまだ利用可能であるため、誰もがルーターにこだわるわけではありません。 Wifi、USB、およびカスタムファームウェアのおかげでカスタマイズの可能性があるため、彼らはそれを気に入っています。 D-link DIR-320には多くのof笑がありましたが、彼はただ働いていませんでしたが、ここでは彼についてではありません。 彼が引退する時が来ました。 進歩は止まっておらず、今ではTP-LINK TL-MR3020の赤ちゃんは肩の上に「高齢者」機能を持ち込むことができますが、これを読んだほうが良い選択肢になるという事実はありません。 このモデルの利点は主にサイズにあり、次に、より機敏です。 ファームウェアを長く面倒にする必要がないことも言及しておく必要があります。すべてはすでにroboforum.ru/wiki/OR-WRTで行われています。 roboforum.ruのホームロボット工学への多大な貢献に感謝します。 したがって、ルーターをフラッシュして、特定の条件に合わせて少し構成するだけです。

図 2 TP-LINK TL-MR3020ルーター。
3.すべてを見る目。 ウェブカメラはいずれにも適していませんが、この厄介な選択はすでに何度も受け継がれています。 まず、UVC(USB Video Class)をサポートする必要があります;ここwww.ideasonboard.org/uvcにリストがあります。 次に、彼女が自分で流れを圧縮するのは良いことです。 最適なものは、安価で高品質のLogitech Webcam C100です。 カメラ自体で何もする必要はありません。インストールしてUSBルーターに接続するだけです。

図 3 Logitech Webcam C100
4. L293Dエンジン制御ドライバー。 これは16フィートのサーキットです。 彼女は次のことを行います-電圧が一方の入力に印加されると、モーターは一方の方向に回転し、もう一方の方向に回転すると、もう一方の方向に回転します。 回路は2つのモーターのみをサポートします。 使用しない場合は、Nブリッジを気にする必要がありますが、電子機器を搭載しないことを約束しました。 それは一銭かかり、まともな頭痛にかかります。

図 4 L293Dエンジン制御ドライバー。
5. マイクロコントローラー。 すでにマスターしているものを使用できます。 主なことは、UARTを介して数バイトを受け入れ、それらに応じて、対応するレッグに0または1を設定できることです。 中国流出のArduino Mini Proを使用しました(蹴らないでください)。 初心者にとっては、これが最も簡単です。
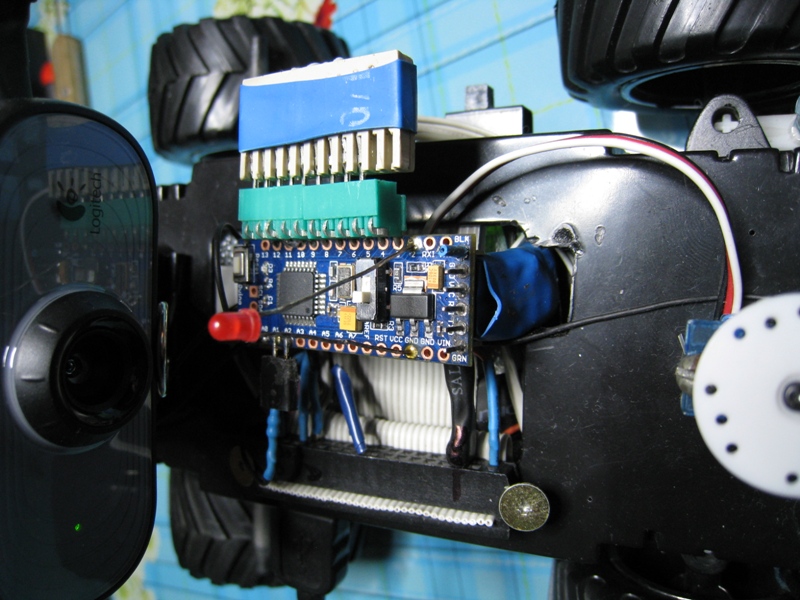
図5.マイクロコントローラー。
6. そして最後のことはバッテリーです。 私は電力について多くのことを戸惑い、4本の単三NiMhバッテリーを入手する最も簡単な方法であるという結論に達しました。 2500mAhの容量に達し、安価で、過充電を恐れません。 後者は私たちにとって重要です。なぜなら、ボットは充電できる人がいないため、充電できる必要があるからです。 最も簡単な方法は、必要な電圧(6.4V)を持ち、バッテリーを急いで充電するためにトロリー全体の消費量とさらに50-100mAに等しい電流を提供できるPSUにバッテリーを直接接続して整理することです。 したがって、トロリーは電源からの電流を消費し、過剰はバッテリーに付着します。 そして、ここでは充電スキームは適用されません! はい、熟練した電子技術者はすでに刃を研いでいますが、これはすべて目に見える損傷なしで数ヶ月間働いています。 主なことは、適切なPSUを選択することです。 電流は抵抗によって制限できます。 また、ダイオードを入れて、考えられる短絡やサイドキックを取り除きました(シューマッハが逆さまに充電に突き刺さった場合)。 これは、設計機能により可能です。たとえば、鉄製のドアの接点に簡単に寄りかかることができます。 ここでは、 peugeot-citroen.net / viewtopic.php?f = 11&t = 7332&p = 104602人々が徹底的なバッテリーテストを行いました。彼に感謝します。
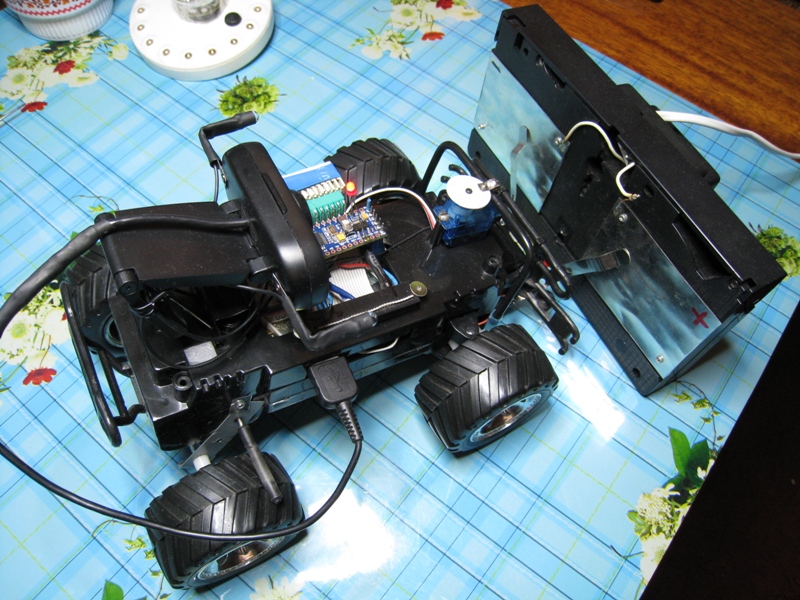
図 6.充電。
組立
バッテリーはシャーシに取り付けられており、取り付けを簡単にするために、シャーシに沿って走る板金製の2つの長いタイヤを作成しています。 (コーヒー缶のブリキは簡単にはんだ付けされます。)1つには、トグルスイッチを介して「+」バッテリーを接続します。これにより、構造全体の電源が切れます。 マイナスは自然に2番目のバスに接続されます。 したがって、すべての消費者はタイヤに簡単にはんだ付けでき、有線接続のバッカナリアを手配しません。 充電に「当接」するために、弾性コンタクトを同じタイヤにはんだ付けします。
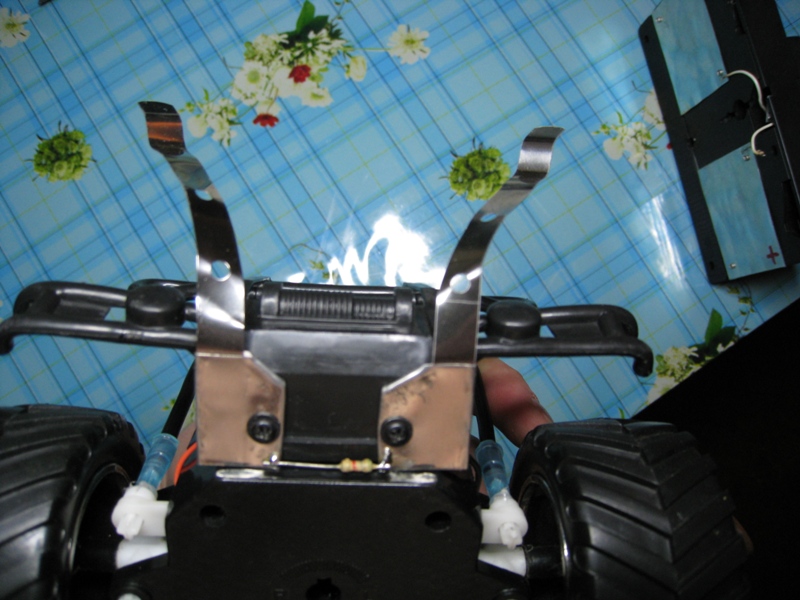
図 再充電のための7つの連絡先。
次に、ルーターを完成させます。 内部UARTを引き出して、そこにマイクロコントローラーを簡単に接続できるようにする必要があります。 結果に満足するまでマイクロコントローラーを数回プログラムするため、しっかりとはんだ付けすることはお勧めしません。 この方法で接続する必要があります:アースとアース、プラスの電力とプラス、RXとTX、TXとRX。 ピン配置はこちらwiki.openwrt.org/toh/tp-link/tl-mr3020次に、そこにOR-WRTファームウェアを入力します。詳細な手順は上記のwikiへのリンクにあり、ネットワーク用に構成します。 ルーターが完成しました。
図 8ルーターへの接続。
エンジンドライバーをインストールします。 マイクロコントローラーのレッグ( "RA0"、 "RA1"、 "RA2"、 "RA3")に既にはんだ付けされているプラスと4マイナスと4本のワイヤーに4本の足、そして残りにエンジンをはんだ付けします。
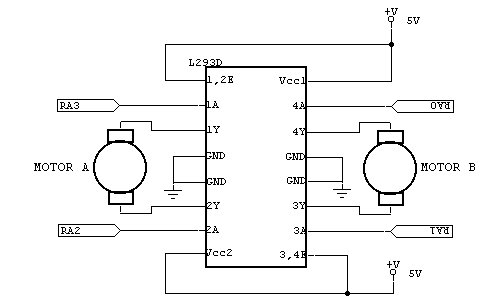
図 9 L293Dを接続します。
これは、マイクロコントローラーが、たとえばRA0ワイヤーがはんだ付けされている脚に高レベルを設定し、モーター1がたとえば左に回転し、RA1が右に回転する場合、次のように機能します。 2つのユニットを取り付けた場合に何が起こるかという質問に先んじて進みます。悪いことは何も起こらず、モーターは同時に両方向に回転します。 冗談。 エンジンは回転しません。 Nブリッジの場合、これは短絡回路になりますが、私たちの回路はこれを恐れず、絶対確実です。
マイクロコントローラは、連続したサイクルで、受信したバイトに従ってレッグに高レベルを設定するだけです。 そしてそれだけです。
Arduino Mini Proマイクロコントローラー用のプログラムは次のとおりです。
HomeBot1_min.pde
そのファームウェアには、コンピューター用の通常のUARTアダプターが必要です(RS232と混同しないでください、これは同じですが、電圧は異なります)、私は一般にSiemens電話からの古い日付ケーブルを使用します。 ピンの割り当てはルーターに接続したときと同じですが、RS232コネクターからもう1つDTRピンが必要です。これはマイクロコントローラーの「GREEN」ピンに接続され、ファームウェアが起動すると「0」に設定されるため、コントローラーはすぐに更新されることを認識します。 MKのリセット自体を時間内にクリックするだけでこの連絡先を取得できない場合、私は成功していませんが、インターネット上に生きている目撃者がいます。
主なことは、プログラム内のピンが物理的にピンと一致したことです。 モーターが回転しない、または間違った方向に回転する場合は、はんだ付けを確認するだけで、おそらく混同されています。 すべてを非常に簡単にテストできます。ファームウェアの後で、MKをコンピューターから切断せずに、必要なバイトを適切なポートに送信するだけです。
ファームウェアプロセス自体は簡単に不名誉になります。 Arduino IDEでスケッチを開き、メニューで適切なポートとMKボードのバージョンを選択します。 [アップロード]ボタンをクリックします。 Arduinoのトピックに関する記事はたくさんあるので、これについては詳しく説明しません。
この段階で、MKからの注文に応じてモーターを駆動するシャーシがすでにあります。 順番に? UARTコマンドを受信します。 Bルーターがフラッシュされ、wifi経由でホームネットワークに接続するように構成されています。
次に、Webインターフェイスを少し変更して、そこからのコマンドがルーターの内部UARTに直接送信されるようにする必要があります。 まあ、それから、それぞれ、MKに。
わざわざせず、よく知られたボタン「A」、「S」、「D」、「W」を割り当てて私たち全員を制御しました。つまり、MKがバイト「W」(0x57)を受信すると、ワイヤがはんだ付けされている脚にユニットを設定します前進する責任など
必要なファイル:
index.html
serial.cgi
またはすべて一緒に
そして、サーボ付きの最新バージョンを含む、スケッチの異なるバージョンのセット。
唯一の変更点は、Webインターフェースでボタンの押下を処理するJavaスクリプトが、押されたボタンに応じて「A」、「S」、「D」、「W」を送信するようになったことです。 また、送信しているスクリプト自体は、ルーターの内部UARTにリダイレクトされます。 ファイルは、WWWディレクトリ内の元のファイルを置き換える必要があります。
これを行う最も簡単な方法は、素晴らしいwinSCPプログラムwinscp.net/eng/docs/lang:ru via SSHを使用することです。
それがおそらくすべてです。 Wifiボットを受け取ったら、自由に変更できます。 別の機器を追加します。 たとえば、ロータリーモーターをサーボドライブに交換します。 これにより、エネルギーを消費せずに車輪を回し続けることができますが、それなしでも実行できます。

図 10サーボ。
充電は、従来の変圧器と整流器によって行われます。 古いビデオカセットがフレームとして使用され、接点は「コーヒーシート」でできています。 あなたがする必要があるのは、タクシーに乗り、連絡先を充電することだけです。 再充電する場合でも、過剰は熱を通過します。
とにかくすべてをカバーすることはできなかったことを理解しており、十分な質問があれば拡張記事を作成できます。
最後に、いくつかのビデオ。