ただし、簡単な方法を探しているわけではありません。すべての電子回路がどのように機能するか、モジュールの相互作用、メカニックの動きを理解し、地獄のすべての領域を通過するためです。 さらに潜行性の高いもの-TAU、識別、termehaを使用してこれをすべて計算するには、これがスキルのトップです。 なんで? はい、次の誤動作では、ペットを一番上の棚に投げつけないで、少なくともそれを把握しようとします。最大で、この誤動作を修正します。 しかし、さらに興味深いことに、サイボーグを本当に価値のあるマシンにアップグレードできます。
それでは始めましょう。
アイデア:完成したデバイスを「箱から出して」注文せずに「クアッドコプター」などのロボットデバイスを構築しますが、さらなる修正の可能性のために、デバイスのメカニクスと電子機器を徐々に組み立てます。
大都市で部品を注文するのはささいなことです;あなたは会社を探しています、あなたは同意し、購入し、拾います-些細な操作の連鎖。 しかし、私が到着した小さな都市では、これらのアクションにより、わずかに大きな金額が発生し、配達時間が長くなります。
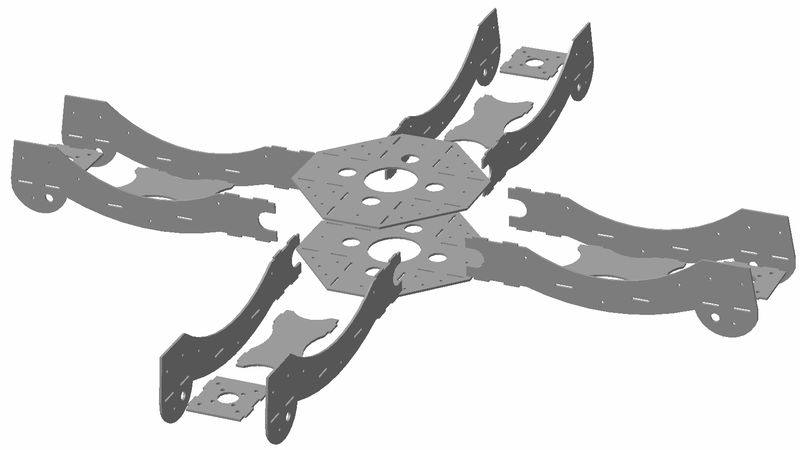
デバイスの製造はケースから始まります
サイズ、重量、フレームのデザインにより、デバイスの特性だけでなく、外観も決まります。 この段階でも膨大な量のニュアンス。 空力、剛性、強度、耐振動性、モジュール性-これは考慮に入れる必要があるパラメーターのリストではなく、あらゆる方向に浅い知識を持っています。 しかし、人間の脳は非常に興味深い「もの」であり、これらすべてを組み合わせて適切な構成を作り出すことができます。
解決策:通常、フォーラムを見ると、この問題の些細な解決策に出くわします:棒(アルミニウム、めったに炭素)-フレームの梁として。 そして、オプションは元気です:スティックの空力は否定できません、いつでも交換できます、神も禁じます。 しかし、上記のように、単純な解決策は受け入れていません。 CAD COMPASS、Solidで作業するスキルがあれば、住宅図面の開発は難しい問題ではありません。 さらに、すべてのメーカーは、マシンに互換性のある形式を使用しています。
ガラス素材がボディ素材として選択されました。
簡単-余分な材料を取り除くと、許容重量を達成できます。
耐久性-縦方向および横方向の繊維の組成により、多くのプラスチックや金属よりも強力になります。
選択は明らかであり、別のプラスとして-簡単に処理できる比較的安価な材料です。
遠隔地にもかかわらず、製造業者の選択はモスクワの会社にかかった。 実際、多くのオプションがありますが、接続要素に関してプロジェクトを改善するために建設的なコメントをいくつか行い、それを鈍く機械に入れて、そのままにしました。
数週間の痛みを伴う期待は、作業の結果によって正当化されました。
エンジン
ブラシレスモーターの膨大な選択により、パラメーターを選択する良い機会が得られます。 選択は、エンジンPilotate DT2209 / 28 Deluxを優先して行われました。

彼らには、電子制御装置が必要です-最大許容電流12Aの制御盤からのPWM信号によって制御される走行コントローラー。 パイロットスタミナ12A V2

実践が示しているように、不可抗力の状況のために、それぞれ4個では不十分です。 バッテリーからのワイヤの長さは延長できません。 しかし、これを行ってから、「ワイヤはきつくないが、どの位置からでも自由にアクセスできる」など、バッテリを接続する利便性を高めました。 その結果、レギュレーターは燃え尽きて灰色の苛性煙となり、部分的に溶けました。
ネジを使用すると、比較的簡単です。ただし、トラクションが長くなるほど、制御が失われます。 2つの間のトレードオフは、選択により決定されます。 また、ねじは対で反対方向でなければならず、互いの回転モーメントを補償する必要があることを覚えておく必要があります。

もっと面白い。 4つすべてをパルス幅信号を生成するコントローラーに接続し、準備ができているので、飛行できます。 わずかではありますが、依然として矛盾はありますが、エンジンは、機械的特性により回転することは可能ですが、長くはなりません。 結果として-不安定性、装置の障害物で表現。 出口があります-加速度計は、見かけの加速度の投影に応じてエンジンの速度を調整することにより、安定化を達成できますが、これは理論上のみです。
犬は、振動がエンジンからボディを介して伝達されるという事実にあり、加速度計は、耐振性のあるガスケットによって減衰されていても、それらすべてをキャッチし、非常にノイズの多い信号をもたらします。
特性を滑らかにするために、さまざまな方法を使用できます。たとえば、平均二乗のソフトウェア法、または加速度計の出力でのローパスフィルターなどです。 ただし、本当に高品質の補正を行うには、ジャイロスコープと加速度計を併用します。 ジャイロスコープは振動ノイズをキャッチしませんが、ドリフトがあります。 ソフトウェアで実装された補完アルゴリズム、またはカルマンフィルターを使用してこれらのデバイスを組み合わせることにより、ロール角とピッチ角を正確に決定することができます。
空間オリエンテーションシステムは、アルゴリズムのソフトウェア実装のために、別個のモジュールとして、およびマイクロコントローラーによって実装する必要があります。 オープンソースプロジェクトの利点は、回路基板の配線へのアクセスを提供します。 ソリューションは、オープンソースのarduimuプロジェクトスキームでした。

メーカーの検索は長くは続かず、エカテリンブルクの会社は丁寧に(固定価格で)高品質のボードを生産することに同意しました。シルクスクリーン印刷でも、精度クラスを減らすことでコストを削減する方法を説明しました。 これを行うには、スキームをやり直す必要がありました。 日付の異なるさまざまなオンラインストアのコンポーネント。 かなり長い間待たされた結果、デバイスは元のものよりも数倍安価であることが判明しました。
管理も互換性のあるボード上のソフトウェアです。

センサーからのテレメトリーの収集は、I2Cインターフェースを介して行われます。
飛行の過程で、主な消耗品はプロペラなので、余裕を持って注文する必要があります。
タッチセンサー、気圧計、GPSモジュール、カメラ、さらには武器-これは、ソフトウェアの絶え間ない更新は言うまでもなく、ロボットに装備できるもののほんの小さなリストです。
