死体:

元はカートリッジE14の下で研ぎました。 しかし、zashashnikでは、5メートルのLEDストリップが長い間塵を払っていました。 カートリッジ-ダウン。 テープを内側から周囲に接着しました。 自己接着層は乾燥しましたが、神に感謝し、ひどく臭いを止めました。 接着剤を使用しなければなりませんでした。 およそ次のことが判明しました。

エミッタの準備が完了し、Launchpadに付属する最小のマイクロコントローラーmsp430g2452が制御マイクロコントローラーとして選択されました。 デバッグボード全体を使用しませんでした。 大きなものが痛いので、プログラマー/エミュレーターで使用されるコントローラーに注目しました。 車のアラームから死んだキーチェーンを取り出し、配線用のボードを切り取りました。 私は組み立てプロセスを撮影しませんでした。 結果は次のとおりです。
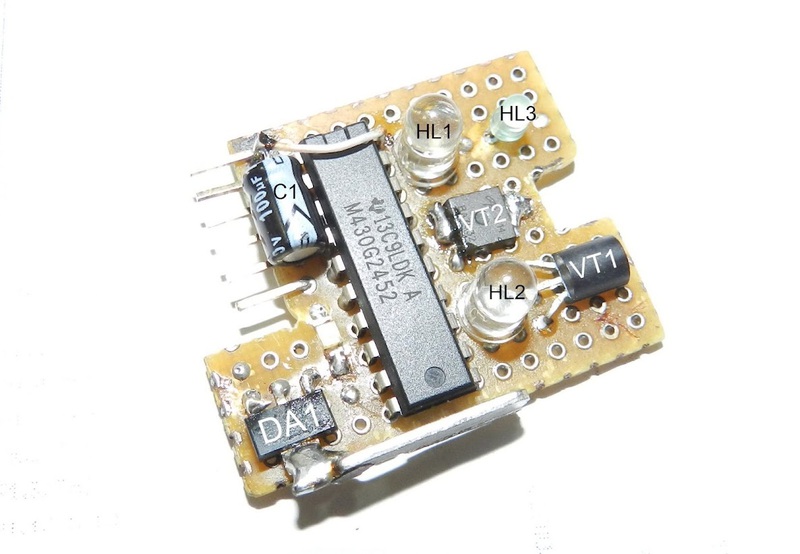
少し詳しく説明します。
VT1-IR LEDを制御するキー。
VT2-PolevikスイッチングLEDストリップ。
HL1-IR-フォトトランジスタ;
HL2-IR-LED;
HL3-緑色のLED。
C1-栄養のためのブロッキング電解質
DA1-3.3Vスタビライザー。 ちなみに、小さなラジエーターはそれにはんだ付けされています。
ボードの裏側:
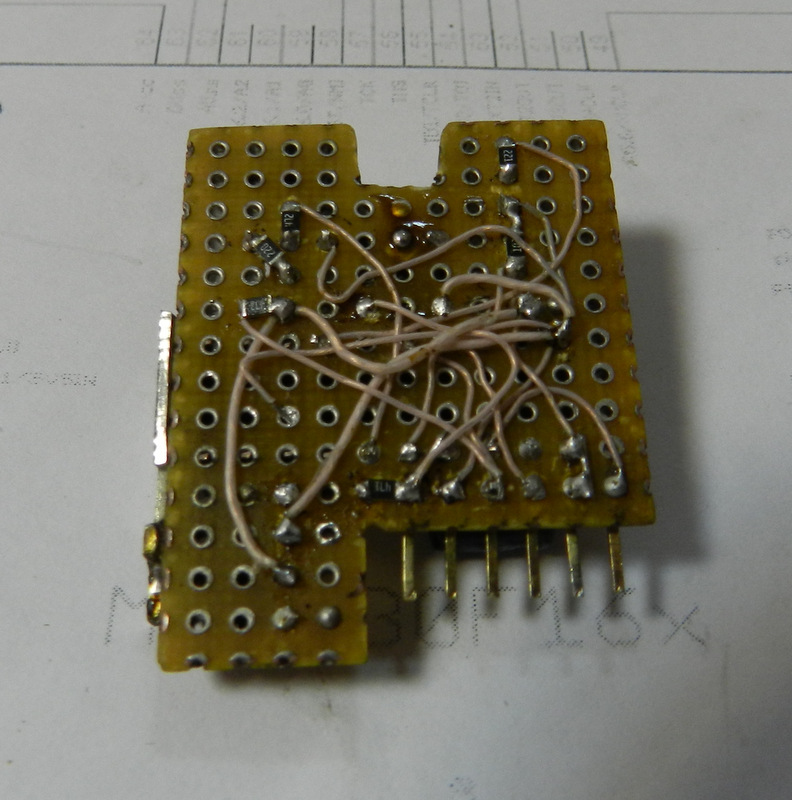
下から右へのワイヤの断片-デバッグおよびプログラミングコネクタ。 マジックアダプターを備えたデバッガー/プログラマーが接続されています。

さらに設計:
L-53F3C LEDおよびL-53P3Cフォトトランジスターで以前にテストされた赤外線距離センサーが非接触センサーとして選択されました。 私は前にこのカップルに対処したことがあります。 それらの上に、ロボット用の赤外線バンパーが組み込まれています。 彼らはよく自分自身を証明しています。 センサーの動作原理は簡単です。 プロセッサはまず、IR LEDをオフにしてフォトトランジスタのADCを介して電圧を測定します。 次に、IR LEDをオンにして、再びフォトトランジスタの電圧を測定します。 測定値の違いは、周囲の物体が赤外線をどれだけ強く反射するかに依存します。 被写体に近づくほど、より多くの反射光がフォトトランジスタに入ります。 信頼性のために、各状態の3つの測定を実行しました。 結果は平均化されました。
この場合のスイッチは次のとおりです。

組み立て:

オン/オフするだけではスポーティではありません。 手始めに、FadeInとFadeOutを作成しました。 つまり 明るさの最大値へのスムーズな増加、およびスムーズなシャットダウン。 ハードウェアPWMを使用して輝度を調整しました。 カーテンの閉幕に向けて、明るさを手動で調整する機能を追加しました。 長い間手をつないで-明るさが徐々に増加します。 その後、減少します。
写真のソース(winrarを解凍する必要があります)

画像内の修正されたソース(コメントを参照)

プログラムの機能の。
ADCを使用します(フォトダイオードの電圧を測定します)。
timer0を使用します(ハードウェアPWMに必要で、LED HL3がまだ点滅しています)。
突然のフリーズから逃れることは悪いことではありませんが、WDTには対応していません。 まだ観察されていないので、触れませんでした。
輝度PWMの指数依存性が使用されます。 デューティサイクルが直線的に変化しても、輝度は直線的に変化しません。
実際、仕事の結果:
PS。 図を描きました。
