はじめに
こんにちは、私の名前はアレクサンダーです。私は長年habrahabrポータルの読者であり、今は自分の開発についても話そうとする時です。これは私の最初の投稿です。あまりscらないでください。
競争について少し
そこで、本日、Volokolamskで開催された第3回全ロシアロボット車競技ROBOKROSS-2012と、サラトフMobRobのチームが2位になった経緯についてお話ししたいと思います。 大会は、Volnoe Delo Foundation、Oleg Deripaska、およびRossmolodezhの支援を受けて開催されます。 2年連続で競技会はセリガー湖で行われ、今回は主催者はモスクワ地域で装備された訓練場で競技会を開催することにしました。

ガゼルの装備
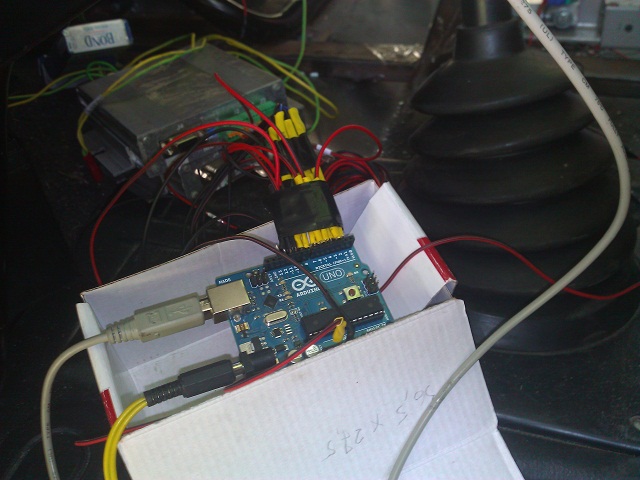
ガゼルの目的を選択するとき、原則として多くの選択肢がありましたが、その選択はarduino Unoボードで決まりました。
から選ぶ
- Fastwel MK 905シングルボードコンピューター

- LabVIEWを使用したナショナルインスツルメンツのシングルボードRIO
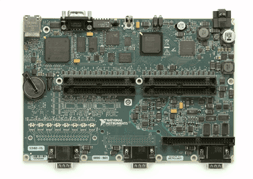
ガゼルは2年連続でNIボードに搭載されましたが、原則として不満はありませんでした。センサーとアクチュエーターの接続を可能にするFBUSバスが24Vで動作するため、mk 905を拒否し、ほとんどすべての機器を12Vに下げたいと考えていました。 今年は、すべてをできるだけシンプルにすることを決めました。 すべて同じですが、すべての機器は非常に高価であり、ガゼルで使用されるだけでなく、次の競技の後、いつものように、何も、ワイヤーも、リミットスイッチも、プログラムもありませんし、最近Arduino Unoボードを購入したので、良いことが判明し、それを使用することにしました。
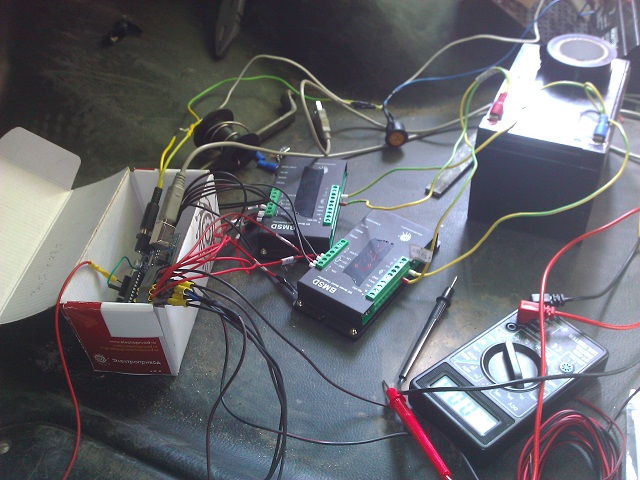
おそらく、ガゼルの上に立っていたすべての機器をリストします
- Arduino uno
- 1 Autronicsステアリングホイールエンコーダー
- SICK LMS 511のレーザー距離計
- 電話番号
- ラップトップ
- 2台のSony Playstation Eyeカメラ
- VAZ車の3つの窓
- 3 MoviServoエンジンドライバー
システム全体(図の形式)は次のようになります

合計2つの動作モードがありました
1.手動制御:意味は次のとおりです。制御信号がラップトップからarduinoボードに送信され、対応するピン(PIN)にPWM信号が送信されます。このピンはMoviServoエンジンのドライバーに接続されます。 。 これにより、クラッチとブレーキが制御されます。 ステアリングは同じですが、エンコーダーがステアリングホイールに取り付けられているため、ステアリングホイールが現在どの位置にあるかを正確に判断できます。
2.オフラインモード:衛星データによる。 ラップトップに接続した携帯電話を使用しました。 ナビゲーションのために、Arduino用のGPSモジュールを購入したかったのですが、それを放棄しました。 それはあまり正確ではありません。ArduinoUNOボードではほぼすべての足がすでに占有されていました。もちろん、Arduino Megaを使用することもできましたが、それでも逆に、携帯電話はセルタワーとGPS また、SICKスキャナーがガゼルにインストールされ、障害マップが作成されました。 現場の障害物は、コンクリートのフェンスと鉄の樽でした。 プレイステーションアイカメラも使用されましたが、複雑なアルゴリズムを作成せず、画像を出力してリモートコンピューターに転送するだけでした。昨年とは異なり、障害物を認識するためのプログラムを作成する必要があったため、単純にそれを必要としませんでした。
完了するタスク
手動モードまたは自動モードで運転する必要がありました。その人は、与えられた軌道で、番号の付いた3枚のポスターが地面に横たわっていました。オペレーターは、裁判官とテントに座って、ラップトップのモニターを見て、ポスターに書かれた数字を見て、すべて番号の順序は異なっていました。 車が自動モードで運転している場合、すべてのポスターを見るには手動よりも多くのポイントが与えられ、ポイントも与えられた2つの樽、いわゆるゲートの間を運転する必要がありました。
おわりに
したがって、要約すると、私たちは最近まで車が動くとさえ信じていませんでした。 競合他社は非常に複雑な制御システムを持っていましたが、非常にシンプルでした。 私たちは速度と軌道のリーダーでしたが、残念なことに、自動モードで運転しているときは連絡が取れず、テントに座っているときに2番目のポスターが表示されず、2位になりました。 残念だ。
コンテストには2つのノミネートがありました。これは私たちが1位を獲得し、一般資格が2位を獲得した最高の技術的ソリューションです。 使用する機器を尋ねた人は全員、「Arduino」という答えに驚きました。

私たちは次の結論を出しました。常にシステムを開発しているときは、できるだけシンプルにする必要があります。このシステムのリンク(ノード)が少ないほど、失敗する可能性は低くなります。これは純粋に私たちの意見です。 もちろん、予備があるシステムでは、はるかに優れていますが、そのようなシステムを構築し、かなりの時間デバッグします。 生徒たちはいつものようにほとんど時間がないので、ガゼルを装備してプログラムを書くのに3週間もかかりませんでした。


下のリンクにあるイベントに関するその他の写真
www.robosport.ru/forum/index.php?/gallery/album/20-%d1%80%d0%be%d0%b1%d0%be%d0%ba%d1%80%d0%be%d1% 81%d1%81-2012
謝辞
GAZとリリア・クサキナに参加したすべてのチームに感謝します。
PSご清聴ありがとうございました。
PPS第2部で何を書くべきか、実際にはわかりません。おそらくSICKスキャナー用のプログラムの実装についてです。 独自のニュアンスもあります。提案があれば、喜んでいます。