
航空複合施設は、ベラルーシのエンジニアによって開発されたもので、制御ポイント、メンテナンスポイント、およびSterkh-BM直行無人航空機が含まれています。 デバイスは、オペレータ制御(SSHトンネル経由)または自動操縦モードで動作します。どちらの場合も、LinuxベースのオープンシステムUAVが使用されます。 地形図は、Googleマップを介してロードされます。
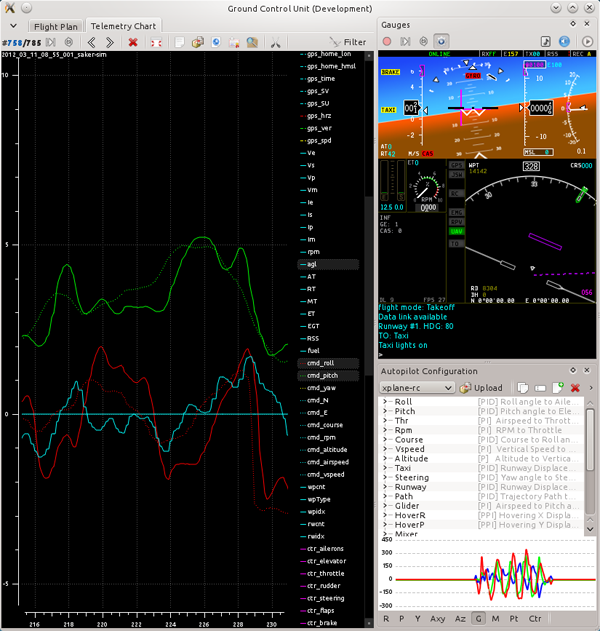
スクリーンショットは、地上局(地上制御装置)からの制御モジュールのインターフェース、飛行タスク入力セクションを示しています。

拡大コピー
テレメトリー:
拡大コピー
UAVの動きの視覚化は、 Google Earthを介しても実行でき、プログラムでデバイスのIPアドレスを示します。
http://:9080/

:
65 120 . 200 , — 240 . «-» 3,8 , — 3 . $250 . , , $1,5 .
. GPS. . , GPS, , .
$500 ., .
. , . . , . .
, , , . , .
15 . 6 .
(pdf)
Open System UAV
http://:9080/
:
65 120 . 200 , — 240 . «-» 3,8 , — 3 . $250 . , , $1,5 .
. GPS. . , GPS, , .
$500 ., .
. , . . , . .
, , , . , .
15 . 6 .
(pdf)
Open System UAV
http://:9080/
:
65 120 . 200 , — 240 . «-» 3,8 , — 3 . $250 . , , $1,5 .
. GPS. . , GPS, , .
$500 ., .
. , . . , . .
, , , . , .
15 . 6 .
(pdf)
Open System UAV