この記事では、ロボット自体の生産、SolidWorksのモデルから実際のデバイスへの移行について直接説明します。
生産開始
最初に注意したいのは、「モデルがあり、プロジェクトの準備がほぼ整っている」と「机の上に完成したデバイスがある」という瞬間の間です。実際、多くのことがあります。 この移行を迅速に行うほど、プロジェクトが放棄される可能性は低くなります。 この段階までに、友人が熱意を失い、プロジェクトを一人で続けました。
モデルが完成した後、実際に生産を開始する必要があり、最初にすることは必要な部品を購入することでした。 サーボとバッテリーに問題がなく、その時点ですでに私の机の上にあった場合、他のすべてを見つけるのはそれほど簡単ではないことが判明しました。 軸として機能する同じネジのベアリングから始めました。 私はM3ネジを選択したので、ベアリングは同じ内径で見つけられなければなりませんでした。 そして、これを行う最も簡単な方法は、自動車/エアモデルストアで行うことでした。 したがって、この種の小さな部品をお探しの方は、まずモデルのあるショップの品揃えを検討することをお勧めします。ベアリングを専門とする店に連絡するよりもはるかに簡単であることがわかりました。
ここでそのようなセットを購入しましたhttp://rc-go.ru/cat/product27455.htm-内径3 mm、外径-8 mm、高さ4 mmの4つのベアリング、4ピースで450ルーブル相当。
奇妙なことに、ベアリングを見つけることは難しくありませんでしたが、ネジを購入することははるかに困難です。 事実、M3から始まって、ネジはほぼすべてのコーナーで販売されていますが、M2ネジは設計に存在しました-サーボの「ロッキング」を搭載し、M3を使用することは不可能でした-ロッキングチェアを回転させるだけです。 普通の店にはそのようなネジはなく、金物店では数千本しか売っていませんでした。 幸いなことに、1本のネジさえ買える店を見つけました。 「スーパーボルト」というやや一貫性のない名前にもかかわらず、店は非常に良いことが判明し、すぐにすべてのファスナーを購入しました-隠された頭を持つ異なる長さのM3、M2、それらのナットとワッシャー。
VoltMasterストアでさまざまなサイズのラックを購入しました。
合計すると、この小さなものはすべて500ルーブルより安く出てきました。
次に、どこから、どこから部品を加工するかを選択する必要があり、ここでトラブルが待ち受けていました。 私たちは多くの場所を製粉しましたが、私たち自身の材料が必要なすべての場所で、厚さ2 mmのシートアルミニウムは存在しなかったか、「一度はありましたが、今は終わりました」。 新しいシートは1x3メートルの形式でしか販売されていませんでした。 私は5つの会社に電話をかけたが、どこにもトリミングを売る準備ができていなかった。
しかし、幸いなことに、前のクラスメートがフライス盤を持っていることを思い出しました。 彼に連絡して問題を話し合ったところ、彼にはアルミニウムシートもありませんでしたが、 ALUCOBONDと呼ばれる複合材料がありました。ALUCOBONDは2つの薄いアルミニウムの「サンドイッチ」で、その間にポリマーが封入されています。 このサンドイッチの厚さは3 mmで、密度(したがって質量)はシートアルミニウムの2倍でした!
したがって、固体の密度を調整した後、新しいモデルの質量は約650グラムになりました。
ちなみに、数日前に、会社の1つでまだアルミニウムのスクラップを購入できることがわかったので、ジュラルミンが絶対に必要な場合は、それを見つけることができますが、常に見る必要があります。
必要なものがすべて購入された後、次の段階に進む時が来ました。
生産
そして今、私は最も重要なことについてお話しします。 生産中に踏むことができるレーキについて。 追加費用が発生するレーキ。
まあ、最初に、これが最初のプロジェクトである場合...はい、最初のプロジェクトではない場合でも、デザインがまだデバッグされていない場合は、大企業ではなく小規模の個人所有者に切断/フライス加工を注文することをお勧めします。 大企業の隣に座ることを許可される可能性は非常に低いため、最初の部分がドライブに合わないことを確認して、「フライスを止めてください!!!」と叫んでください。
私はクラスメートと一緒に製粉したので、このような機会がありました。 最初にいくつかのテストパーツを切り取り、それらを確認してから、すべてがうまくいけば、他のすべてを切り取ることに同意しました。 もちろん、テストパーツはドッキングしなかったので、外出先で編集して、再度カットする必要がありました。
それで、何に注意する価値がありますか?
- レーザーカットまたはミル? 答えは、設計要件によって異なります。 レーザー切断は高速です。 価格については、原則として、それほど違いはありません。 しかし、穴を皿穴にする必要がある場合、つまり、この図のように、頭が隠れているネジの穴を形成する場合
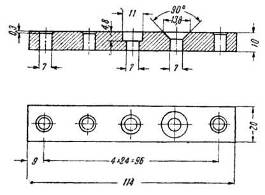
その後、レーザーはあなたを助けません。 しかし、このような穴はドレメルと対応する円錐形ノズルの助けを借りて自宅で基本的に得られることがわかりました。これは次のようなものです。

- 二国間詳細。 これは、ミリングされたシートを回転させなければ得られない部品を指します。たとえば、両側に皿穴があるか、貫通溝があります。 ここでも、レーザーは消えます。 しかし、フライス加工では、すべてがそれほど滑らかではありません。 大企業でどのように製粉したかはわかりませんが、それは言葉では言い表せないhemoになり、時間のコストを増大させ、それに応じて金銭も増大します。 大企業ではこれも無料ではないと思います。 したがって、そのような状況は避けてください。 ドレメルで皿穴を開けることができます。それは迅速で無料です。
- カッターの半径はゼロではありません。 これは明らかです。 したがって、内部カットはこのカッターの半径より小さくすることはできないことに注意してください。 つまり、内部の角は丸くなります。つまり、そのような溝に挿入された部品は適合しません。 例で説明します。
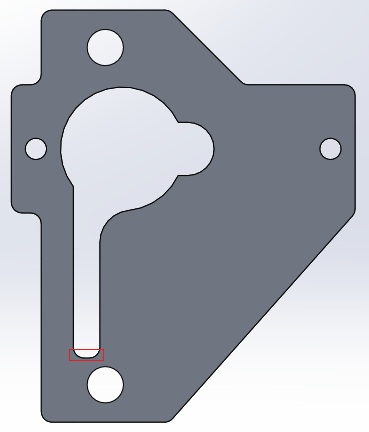
これは、2つのサーボが取り付けられている脚の付け根からのノードであるサーボマウントの一部です。 技術的な境界線は赤枠で囲まれています。 それがモデルで行われない場合、フライスはそれをカットします-とにかく 物理的に直角を作ることはできません。 しかし、溝を延長するだけでは確かにそうなりません。したがって、その実際の長さ(つまり、一定の幅を持つ部品の長さ)は、カッターの半径分だけ小さくなります。 ファイルに詳細を記録したくない場合は、この瞬間をすぐに予測することをお勧めします。
- サイズ。 すべてを測定する必要があります。 聞こえますか それだけです。 まず、次のような電子ノギスを購入する必要があります(通常のノギスを使用することもできますが、電子ノギスを使用することもできます)。
デザインに含まれるすべての購入部品を0.1 mmの精度で測定します。 第一に、インターネット上で与えられる次元はしばしば非常に不正確です。 そして第二に、中国人にとっては、通常の図面のようなものは原則として存在しないようです-例えば、彼らが彼らのサーボドライブに与えるもの:
必要なサイズの半分以上が欠落しており、残りのサイズは正しくありません。 しかし、これで私は非常に強くプッシュしました。 いいえ、必要なすべてを測定しました。 しかし、上記の詳細を描き、ドライブの円筒形の突起を測定すると(部品からわかるように、2つあります。1つは大きく、1つはシャフトが突き出ており、2つ目は小さく、1つ目が突き出ています)ビッグの側面。 テストピースが切り取られた後、ドライブはそれに入りませんでした。 よく調べてみると、小さなシリンダーは大きなシリンダーの側にあるのではなく、0.3(!)Mmシフトしていることがわかりました。 この0.3 mmは、ドライブが必要な場所で痙攣するのを防ぐのに十分でした。
もちろん、寸法が非常に重要なすべての場所ではありません-エラーが大きく影響しないデザインを見る必要があります。 しかし、最も重要なことは、それを忘れずにすべてを測定することです。
何度か構造を修正した後、ジャムは最終的に消え、部品のパッケージを受け取り、そこからEctognatusを集め始めました。
組立
組立段階では特別な熊手はありませんでした。 私は2つのことだけに注意します。
- ナットが緩んでいます。 容赦なく。 残念ながら、M2ネジの自己緩みを防ぐロックアップワッシャーはありませんでした。M3がある場所では、ベアリングをロックしたため、放棄する必要がありました。 そして、作業の過程で、外出中にナッツが落ちるのを見る機会がありました。 そのため、デザインを組み立ててテストした後、ナットをエナメルまたはペイントに植えることができます。 ねじを緩めることは停止しました、誰もが幸せです。
- ロボットの塗装。 この同じアリューコボンドはあまり快適な色ではなかったので、一方では青、他方では緑でしたので、ペイントすることにしました。 このために、非常に非常に優れたブラックマットオートエナメルが登場しました。 それはよく置き、すぐに乾く。 確かに、私はブラシとスプレーでペイントしましたが、後で言われたように、結果は良くなりました。 テストされていませんが、非常に可能です。

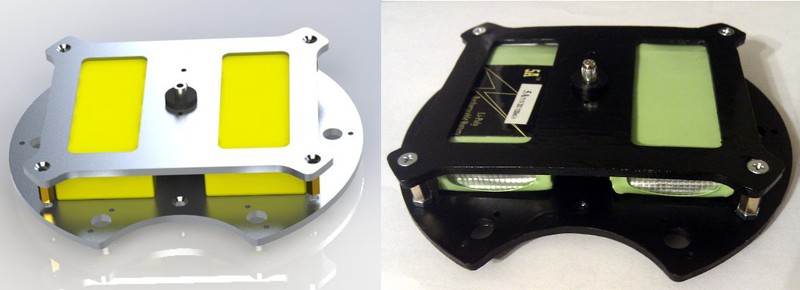
これが、新しく切削された部品の外観です。
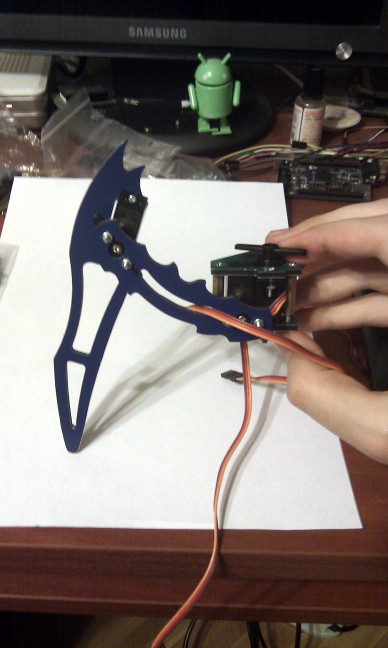
脚の組み立て、構造チェック。
ロボットのモデルと実際の体
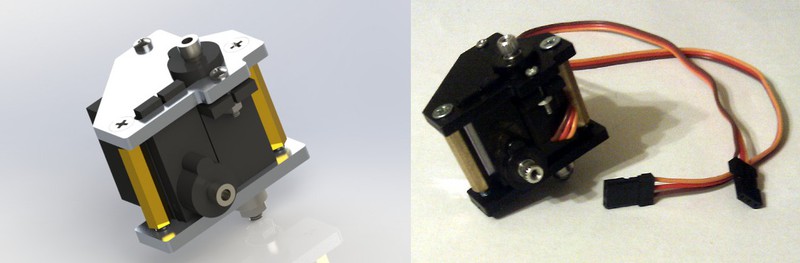
モデルおよび実際のサーボマウントノード
Ectognatusアセンブリ
確認する
したがって、構造全体を組み立てたら、実際に動作をテストします。
カスタムエレクトロニクスを設計する前に、現実の世界での動作、消費電流などを確認したかったのです。 検証のために、Mini-STM32ボードを使用することが決定されました。これについては、対応する記事で既に説明しました 。
コンバータなしでバッテリから電子機器やドライブに電力を供給することは不可能であるため、バッテリは設計上は機能しませんが、接続されていません。
検証のために、次のパスを選択しました:回路基板はすべてのドライブが接続されているブレッドボードから作成されます-電源とグランドは18台のドライブに接続され、それらの信号入力は3つの部分(1本の脚)にグループ化されます。 Mini-STM32は、ソケット( これらのような )で配線することにより、このボードに接続されます。
多くのチャネル(18個!)があり、周波数が約50ヘルツであったため、hardware核だけを探してハードウェアPWMを追いかける意味はありませんでした。 したがって、ドライブからの信号入力は、通常の無料のGPIOに掛けました。 Nordic製のチップを搭載した無線モジュールがコントローラーのSPIに接続されましたが、これは賞賛に値します。http : //www.ebay.com/itm/1pcs-NRF24L01-2-4GHz-Antenna-Wireless-Transceiver-Module-For-Microcontr-/ 261072511055
かつて私は彼のために単純なポーリングではなくインタラプトとDMAで動作するFreeRTOSのドライバを書いたので、このFreeRTOSをボードに載せました。
実際、これは無線制御の18チャンネルPWMジェネレーターであることが判明しました。 ソフトウェアの観点から見ると、無線モジュールのドライバーを除いて、特別なトリックはありません。 PWMは、 DIHALTによるこの記事と同じ方法を使用して、単一のタイマーを使用して生成されます。
18の構造の配列があります
typedef struct { u32 __O *PinAddress; u16 DutyCycle; }PWMChannel;
場所* PinAddress-選択したレッグの制御のビットバンドアドレス。 配列はDutyCycleによって昇順にソートされ、最初の要素のDutyCycleは Capture-Compareレジスタに入力され、タイマーの一致によるインターラップでは、対応するピンレベルがPinAdressを介して設定されます 。 次に、次のDutyCycleが SSレジスタに入力されます。 タイマーが最大値に達すると、すべてのピンが1に設定され、配列が(新しい値が来る場合に)再ソートされ、すべてが再び繰り返されます。 到着した値が世代をノックダウンしないように、それらは新しいWork配列に入力され、タイマーオーバーフローの時点で、Work配列とSorted配列が交換されます。したがって、ダブルバッファリングを取得します。
コンピューターと通信するために、USBで接続された同じ無線モジュールを備えた同じボードが使用されます。 その中に、HIDデバイスを実装しました。これにより、追加のドライバーなしで、便利なプログラミング言語からデータが基本的に送信されます。 私の制御プログラム、たとえば、C# 送信機はもちろん、FreeRTOSも制御されているため、モジュールドライバーを書き換える必要はありません。 情報は1つのタスクでロボットに送信され、USBとのデータ交換-他のタスクで送信されます。 USBを介して新しいものが何もなかったとしても、送信機は絶えずロボットにpingを送信し、対応するヘッダーを持つパケットを送信します。 無線モジュールにはハードウェア接続があるため、ロボットとの接続があるかどうかをすぐに確認し、対応するバイトをステータスに設定できます。 レポートとしてのUSBタスクは、まさにこのステータスを送信します。
新しいデータが到着すると(18個のドライブの角度の値は生のまま、フリルなし)、USBタスクはそれらを送信用のキューに入れ、同じ生の形式の送信機タスクはそれらをロボットに送信します。既に述べた配列Workに入れます。
したがって、すべてのロジックをコンピューターに実装できます-ドライブのデューティサイクルのみがロボットに送信されます。
もちろん、将来的にはこれは別の方法で実装されますが、検証に完全に適しています-グランドを100回変更する必要はありません。

半日で書かれたプログラムは、もちろんインターフェースを誇ることはできませんが、原則としてその機能を実行します。 これまでのところ、IRはなく、動きを描くために額に書かれたモデルとコニーシーケンスを描くための順運動学のみでした。
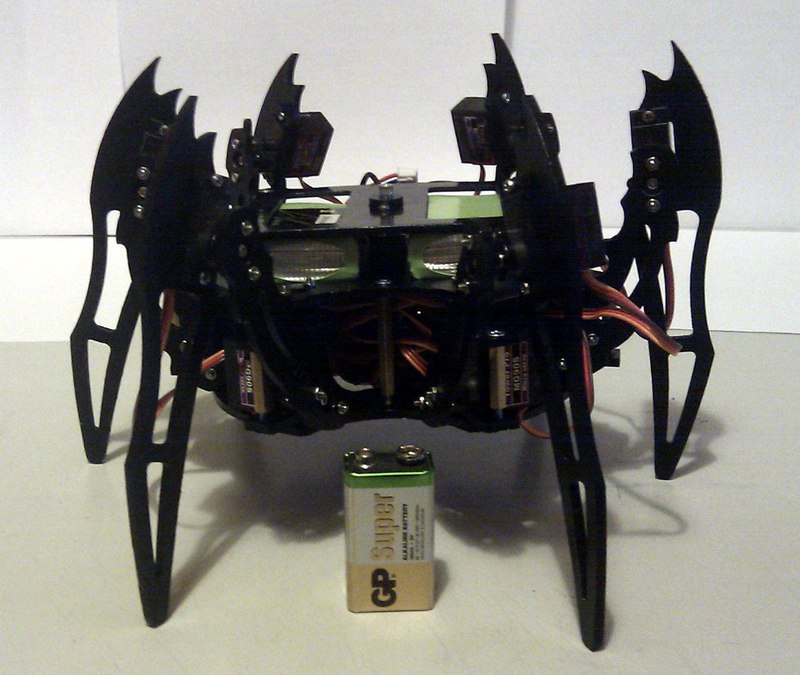
上記のすべてが完了した後、Ectognatusにいくつかのシーケンスを記録しました。彼はこのビデオでそれを再現しました。
それに接続されたワイヤはLBPから給電されます。これは、コンバータがないためにすでに上記で説明した理由によります。
それでは、最も重要なことについて話しましょう。 すべての熊手に熊手を、すべてのジャムにジャムを。
中国のサーボへの賞賛
テストの結果がわかりましたか? ロボットはかろうじて立っていました。 彼はどういうわけか6本の足で体重を保つことができましたが、2本を持ち上げるには十分であり、彼はこの側に転がりました。 私が見たものは非常に、非常に動揺しました。 手がまっすぐ落ちた。 私は座って、「本当に計算が間違っていてロボットが耐えられないのだろうか」と考えました。 私は電池で彼の「床」を脱ぎました-650-700グラムの代わりに、Ektognatusは500-550の重さを量り始めました。 その後、彼はしぶしぶ働く意欲を描いた-上記のビデオは、これらの条件で撮影されました。 しかし、どのように? そして、「ドライブに何か問題があるのではないか」と考え、メーカーが宣言した瞬間を測定することにしました。 ここで熊手が開き、額をとても痛めた。
すべての熊手と同様に、それらは2つの部分で構成されていました-あなたが踏み込んでいる部分、小さい、金属、および額に激しく当たる部分。
レーキの金属部分は、メーカーがMG90とMG90Sの2種類のドライブを製造しているという事実でした。 これらは、パラメータと設計がわずかに異なります。
ここに私が買ったMG90Sがあります:
重さ:13.4g
寸法:22.8 * 12.2 * 28.5mm
ストールトルク:1.8kg / cm(4.8V)-2.2kg / cm(6.0V)
動作速度:0.10sec / 60degree(4.8v)-0.08sec / 60degree(6.0V)
動作電圧:4.8-6.0V
MG90は次のとおりです。

ドライブの下部の突起に注意してください(この状況では彼は彼女であり、構造に入ることなく「嫌いな人」と呼んでいます)。 図面でははっきりと見えます:

そして、そのパラメーターは次のとおりです。
重さ:14g
寸法:23.1 * 12.2 * 29.0mm
ストールトルク:2.2kg / cm(4.8V)-2.5kg / cm(6.0V)
動作速度:0.11秒/ 60°(4.8v)-0.10秒/ 60°(6.0V)
動作電圧:4.8-6.0V
違いに気づきましたか? 少し遅くなり、少し難しくなります。 まあ、私自身はレーキのこの部分を踏みました-もちろん、より強いMG90を使わなければなりませんでした。 ただし、両方ともサーボマウントに取り付けようとした場合にのみ設計に参加しませんでした(実際には、「くぼみ」のためではなく、長さよりも高さが少し高いため、マウントはスクエアドライブ用に設計されています)。 しかし、MG90Sと共に、彼は問題なくグローブのように山に立ちました。 弱いMG90Sはほとんど負荷のないロータリーサーボとしてのみ残っていたので、これは私に非常によく合いました。 そして、すべての重量を占めるサーボは、MG90に簡単に交換できました。
それでは、レーキハンドルを見てみましょう。 大きくて重い。 それでは、普通の人はどのように失速トルクパラメーターを知覚するのでしょうか? 明らかに、このように:「X * YがStall Torqueによって指定されている場合、サーボの軸からXの距離でY未満の重量を吊り下げると、サーバーはこの重量を持ち上げることができます。 質量がY程度の場合、セルバはそれを保持できますが、持ち上げることはできません。
高価で優れたドライブの場合、これは確かに当てはまります-ただし、確認する必要はありません。 しかし、中国の同志はこのパラメーターを異なった方法で取ります。 それは実際の瞬間とは実質的に関係ありません。 誇張しているわけではありません。これは、あるMG90Sについては、記載されているモーメントの3分の1、3から2分の1であることを意味します。 MG90の場合-2つ。 等 つまり、直線的な関係すらありません。たとえば、「3で割る」ことはできません。
しかし、詳しく見てみましょう。 ドライブの瞬間を測定することにしました。 これを行うには、簡単な装置を使用できます。これには、肩と計量カップとして機能するものを入れた水を入れる容器があります。 肩として、私はロボットの足の水平部分、長さ6 cmをとったため、5 Vの電源の汗を流すと、セルバは300 mlの水で容量を上げることができると期待していました。 この場合のモーメントは、0.3 * 6 = 1.8 kg * cmに等しくなります。 容量はジュースの下から1リットルのパッケージで、そこから上部を切り取り、そこにハンドルの代わりに強いワイヤーを通しました。 自宅でこれを繰り返す場合は、バッグとハンドルの両方がしっかりと保持されていることを確認してください。そうでない場合は、すべての機器を充填できます。 肩はサーボドライブにねじ込まれ、パッケージは肩の2番目の端に掛けられ、小さなプログラムが回転角度の最小値を与え、ボタンが押されたときに最大値に置き換えられます。 この場合、サーバーは負荷を最低位置から最高位置に持ち上げようとします。 水の量によって、貨物の重量、つまりサーボに作用するモーメントが決まります。 セルバが荷物を持ち上げることができなくなるが、わずかに減少して持ち上げられ、失速トルクが発生する瞬間。
私が最終的に見たもの:300 ml(モーメント1.8)-漿液は動きません。 まあ、瞬間が過大評価されている、これは予想されています。 しかし、推定によると、私は大量の供給がありましたが、彼らはどれだけ過大評価していましたか? 測定を続けます。
250 ml(モーメント1.5)-ほとんど動かない。
150 ml(モーメント0.9)-わずかに上昇し、中央に到達することさえありません
100 ml(モーメント0.6)-ほぼ中央に到達
〜90 ml(モーメント0.54)-負荷を上げます。
正直なところ、私は自分の目を信じることができませんでした-指標を過大評価することは可能ですが、3回以上...これはそのようなサーバーですか? しかし、いいえ、注文した20個すべてを測定しました。
その結果、3分の2が上記のように動作し、3分の1はさらに弱かった(私が発見し始めなかった限り)。 さらに、PWMには大きな広がりがありました。つまり、1つのサーボでは最大回転がデューティサイクル、たとえば0x200(タイマーレジスタの値)で、もう1つでは0x1E5などでした。
しかし、すべてがそれほど悪いわけではありません。 MG90ドライブを20台注文しました。これらのドライブは「お尻」があり、より強力です。 測定結果はよりバラ色でした-宣言された瞬間2.2で、彼らは約1.2を与えました。
つまり、特性はすでに3つではなく2つだけ過大評価されていました。 まあ、まだ他の人よりも弱いことが判明した人がいましたが、それでもそれほど重要ではありませんでした。
サイトに記載されているパラメーターによると、MG90の強度はMG90Sの1.2倍であり、実際にはMG90はMG90Sの2倍以上強力です。 さらに、彼らは非常に静かで、設定点領域の振動の影響を受けにくいことが判明しました-こんにちはMG90S PIDコントローラ。
これからの結論はこれです。サイトのパラメータが月の位相と星の渦だけを介して実際に接続されていることを後で発見したくない場合は、中国メーカーから受け取った情報を信じないでください。 開発の前に、1〜2台のドライブにお金をかけずに、実際の瞬間、消費、速度を計算してください。 これは、バッチ全体を後で並べ替えるよりも安価です。 まあ、中国のドライブを購入するなら-余裕を持って撮ってください。 重要なのは、3分の1がさらに弱くなっただけでなく、1つが一般的に打たれた(ひどく震え、レギュレーターに何か問題があったようだ)ことで、ペアは緊張から燃え尽き、もう1つはギアを引き離したモーターシャフト。
しかし、2度目に購入したMG90には満足しています。 その結果、ロボットはバッテリーと一緒に非常に穏やかに上昇し、絶対に落ち着いて足を上げることができ、落下することを恐れず、1つの動きで「展開された」位置から立ち上がることさえできました。
今後の改善
そしてこの瞬間、私は一時停止しました。 もっと正確に言うと、私はまったく止まりませんでしたが、休暇が終わって多くの仕事が落ちたため、開発のペースを遅くしました。 現在、ロボット用のカスタムエレクトロニクスを設計しています。これについては、記事で少し説明します。
まず、ドライブに30Wを供給できるかなり深刻なコンバーターを設計する必要があります。 International Rectifierによれば、外部MOSFETを必要としないという事実にもかかわらず、ラジエーターなしで11.1Vから6V x 10AへのDC-DC変換を提供できる非常に興味深いチップを見つけました-パワーチョークのみです。
ダーリン: http : //www.irf.com/product-info/datasheets/data/ir3475m.pdf
もちろん、10Aのドライブは引っ張られません-すべてのドライブがロックされ、ロボットが上昇しようとするときに見た最大値-約6A。 ミクルヒで十分です。 しかし、これは理論上であり、実際には、私はそれを決して使用しませんでした-彼女と協力した人がいたら、あなたの印象を共有してください。
電卓を使用して、STMkuをデバッグ用のものとほぼ同じままにして、長期的には逆運動学をプッシュします。
最初は、これらの無線モジュールで通信を残すことが計画されていました-それらは便利で、fireはすでに私のために書かれています、ピンと完全に互換性のあるバージョンがありますが、0.5kmに当たる地獄のようなアンプがあります。 そして、ロボットの屋根にカメラを置くことを計画しました。 もちろん、カメラから「生の」信号を受信し、このモジュール(通常のビデオを送信するのに十分な速度を持たない)を使用して送信する無駄な作業を行わないために、カメラを組み込みの送信機などで撮影することを計画しました。
反対側にかなり次元のレシーバーが配置され、その出力はアナログであるため、USBデバイスが追加され、アナログビデオソースをコンピューターに接続できます。 そして、原則として、私はすでにこれに同意していますが、その後、 彼を見ました 。
ルータTL-MR3020。 800ルーブルの中国技術の奇跡。 外見はAppleデバイスに非常に似ています。
内部的に-OpenWRTが長い間移植されてきた本格的なLinuxコンピューター。

内部のボードのサイズはわずか5.7x5.7 cmで、USBホストがあります!

その消費は、最も過酷な伝送であっても、180 mAを超えず、平均は約100です。
判明したように、このルーター(およびそのほとんどの記事が書かれている国内市場向けのフルアナログTL-WR703N、検索するとこの名前で検索すると)は、電子エンジニアによってシングルボードコンピューターとして長い間使用されてきました。彼らの工芸品。 通常のビデオストリーミングは簡単かつ自然に上昇し、通常のWebカメラを簡単に接続できます。
TL-MR3020とその双子の兄弟TL-WR703Nの詳細については、OpenWRT Webサイトをご覧ください。
職場では、今それを選んでいるだけなので、彼と一緒にライブで仕事をする幸運がありました。
一般に、私の計画は次のとおりです-私のボードには、回路のすべてのノードに電力を提供するコンバーターがあり、CTMkaはすべてのメカニックのコントローラーとして機能します(脚と屋根の回転サーボ、カメラを回します)、そしておそらく、いくつかのセンサー-例えば加速度計、あなたの傾きを追跡します。 このボードの上にTL-MR3020のボードがあり、ボードにOpenWRTが搭載されており、ロボットとコンピューター間のビデオストリーミングとWi-Fi接続を提供します。 以前は、もちろん、余分なコネクタがそこからはんだ付けされています-スペースを占有するものは何もありません。 また、USB経由でボードに接続され、フットコントローラーを備えたボードはHIDデバイスのように見えます。 したがって、かさばるアナログビデオレシーバー、それに付属するコンバーター、コンピューターへの独立したトランシーバーモジュールを取り除き、Wi-Fiを備えた任意のデバイスからロボットを操縦する機会を得ると同時に、iPadなどからカメラを監視します。
これですべてです。時間があり、ボードを完成させて結果を得るとすぐに、次の記事を待ちます。
ご清聴ありがとうございました!