クアドロコプターに関するHabrの記事を読んで、YouTubeでビデオを見た後、クアドロコプターも作りたかった。
この記事のリストに基づいて、私は素晴らしい中国の店でアイテムを注文しました。 残念ながら、その店舗には無線機器がなく、今までそのような金額の購入経験はなかったため、注文はプロペラ、バッテリー、エンジン、それらのコントローラー(ESC)およびメインコントローラーのみで構成されていました。
すべてが非常に早く到着しました-2週間未満(香港からキエフまで)。 その直後、私は別の店で無線機器とさまざまなささいなものを注文しました。
フレームを即席の材料(地元の建物の店からの正方形のアルミニウムパイプ)から作成し、その上にコントローラーを搭載したエンジンを配置しました。 そして、私はそれらをテストしたかった-突然欠陥のものがあります。 ESCへの指示では、無線制御からのチャネルの1つを接続する必要があると述べています。 しかし、ラジコンは一週間半以内に到着します...
これらのESCがどのように制御されているかを理解しました。 それらはPWMによって制御され、パルスデューティサイクルはここでは重要ではないことが判明しましたが、絶対パルス持続時間は重要です。 最小パルスは1ミリ秒、最大パルスは2ミリ秒です( RaJa 、助けてくれてありがとう)。
ラジコンをエミュレートするために、 ピンボードIIボードであるDiHaltの素晴らしい開発を使用しました(これに感謝します)。 私はCプログラムを書きました、コードはtheいです:マイクロコントローラ(ATMega16)はシリアルポートからのバイトを待ち、それが「q」、「w」、「e」の場合、PWM出力のパルス幅を(異なるステップで)増加させます'、' s '、' d '-削減します。 プログラムはLEDの1つでも点滅します-MKがハングしていないことを確認し、ポートに「1」/「0」が来ると2番目のLEDを点灯/消灯します(コンピューターとの接続を確認するため)。 強くscられないでください、これは最初のCプログラムです(それ以前はtiny13をアセンブラーで書いていました)。
プログラムコード
PWMは488 Hzの周波数で動作し、すべてのESCはそのような信号を適切に認識します。
AVRstudioでコンパイルします(今のところ4番目を使用しています)。MKクロック周波数は8MHzで、ファームウェアはブートローダーを使用しています(MKにピンボードで記録されています)。
ボードを制御するには、通常の画面を使用できます(* nixの場合):
lim$ screen /dev/tty.usbserial-000013FAA 9600
またはWin *のハイパーターミナル。
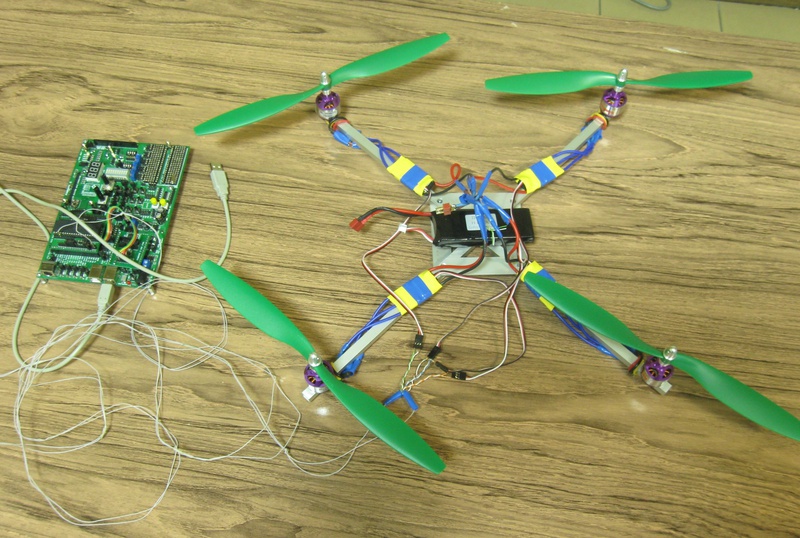
そして最後に、コレクション内のすべてがどのように見えるか:
そしてもう1つのビデオ(2回目の試行):