今日は、%USERNAME%さん、
アーサー・クラークが言ったように、十分に進歩した技術は魔法と見分けがつきません。 だから、それはウェブマッピングです-私は誰もが長い間地理的な地図を使うことに慣れていると思いますが、誰もがそれがすべてどのように機能するか想像しているわけではありません。
ここでは、単純なことのように思えます-地理座標。 緯度と経度。これはもっと簡単かもしれません。 しかし、あなたが砂漠の島にいることに気付いたとしましょう。 スマートフォンがdrれたため、他の通信手段はありません。 助けを求める手紙を書いて、いつものように、密封されたボトルで海に投げ込むだけです。
それはただの不運です-あなたは絶対にあなたの無人島がどこにあるのか分からず、あなたが手紙を受け取ったとしても座標を示すことなく誰もあなたを見つけません。 どうする GPSなしで座標を決定する方法は?
それで、少しの理論から始めましょう。 球の表面上の座標を比較するには、原点を設定する必要があります-緯度をカウントするための基本平面と経度をカウントするためのゼロ子午線。 地球では、通常、赤道面とグリニッジ子午線がそれぞれ使用されます。
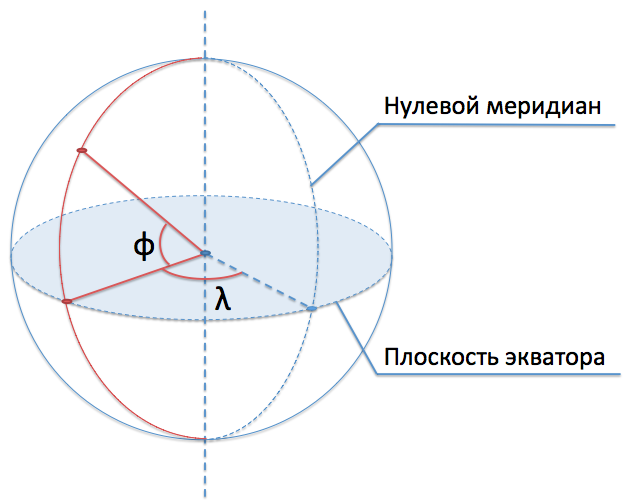
緯度(通常はφで示されます)は、球の中心からの点の方向と基本面の間の角度です。 経度(通常、θまたはλで示される)は、ポイントを通過する子午線の平面とゼロ子午線の平面の間の角度です。
緯度の決定方法、つまり 地球の赤道面とあなたがいる地点との間の角度は?
同じ図面を異なる角度から見て、子午線の平面に投影してみましょう。 図面に水平平面(ポイントへの接平面)を追加します。
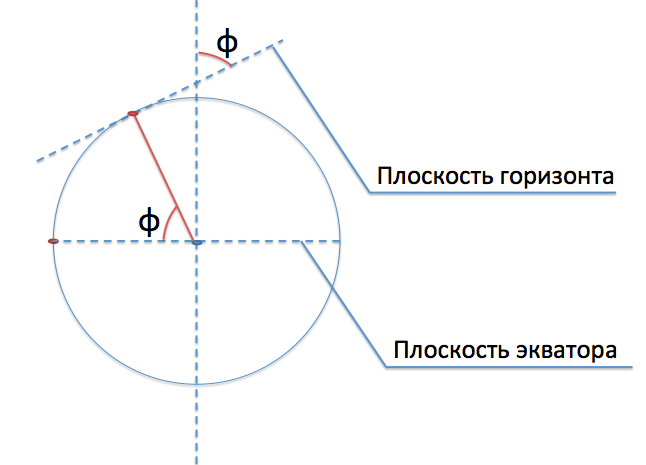
点への方向と赤道面との間の望ましい角度は、水平面と地球の回転軸との間の角度に等しいことがわかります。
それでは、この角度をどのように見つけるのでしょうか? 長いシャッタースピードで星空の美しい写真を思い出してください。

星によって記述されたすべての円の中心にあるこの点は、世界の極です。 地平線からの高さを測定することにより、観測点の緯度を取得します。
問題は、星空で世界の極をどのように見つけるかということです。 北半球にいる場合は、すべてが非常に簡単です。
-北斗七星のバケツを見つけます。
-バケツの2つの極端な星-DubheとMerakを精神的に直線で描きます。
-この直線は、Ursa Minorバケットのハンドルを指し示します。 このペンの極星-極-は、世界の北極とほぼ正確に一致しています。
北の星は常に北にあり、地平線からの高さは観測点の緯度と同じです。 北極点にたどり着くと、北極星が頭の上に正確に表示されます。
南半球では、物事はそれほど単純ではありません。 世界の南極の近くに大きな星はありません。サザンクロス星座を見つけ、精神的に大きなクロスバーを延長し、その長さを4.5に数える必要があります-この領域のどこかに世界の南極があります。
星座自体は簡単に見つけることができます。オーストラリア、ニュージーランド、ブラジルなど、さまざまな国の国旗で何度も見ています。

緯度を決めました。 経度に移りましょう。 無人島で経度を決定する方法は?
実際、これは非常に難しい問題です。緯度とは対照的に、経度の基準点(ゼロ子午線)は任意に選択され、観測されたランドマークに付加されないためです。 1567年にスペイン国王フィリップ2世は、経度を決定する方法を提案した人に相当な報酬を与えました。 フィリップ3世の1598年には、一度に6000ドゥカートと生涯の賃貸料2,000ドゥカートに成長しました。 数十年にわたって経度を決定するタスクは、20世紀のフェルマーの定理のような固定数学者のアイデアでした。
その結果、彼らはこのデバイスを使用して経度を決定し始めました:

実際、このデバイスは、今日でも(GPS / Glonassをカウントせずに)経度を決定する最も信頼できる方法です。 この楽器…(ドラムロール)…マリンクロノメーター。
実際、経度が変わると、タイムゾーンも変わります。 現地時間とグリニッジの差は、独自の経度を簡単に決定でき、非常に正確です。 時差の各分は、経度の15分角に対応します。
したがって、グリニッジ標準時に従って構成された時計がある場合(実際、どの時計が重要かは関係ありません-時計の時刻が実行されている場所のタイムゾーンを知っていれば十分です)-急いで変換しないでください。 現地の正午まで待つと、時差から島の経度がわかります。 (正午の時間を決定するのは非常に簡単です。影を見てください。1日の前半に影が短くなり、2番目に影が長くなります。影が伸び始める瞬間はその地域の天文正午です。)
ちなみに、座標を決定する両方の方法は、ジュールヴェルヌの小説「ミステリアスアイランド」で詳しく説明されています。
ジオイド座標
そのため、数度の誤差で緯度と経度を決定することができました。 数百キロメートル。 おそらくボトルに入った音符で十分なのかもしれませんが、地理的な地図ではもはや存在しません。
このエラーは、使用したツールの不完全性が原因の1つですが、他にもエラーの原因があります。 地球は最初の近似でのみボールと見なすことができます-一般に、地球はまったくボールではなく、ジオイドです-非常に不均一な回転楕円体に最も似た物体です。 地球の表面上の各ポイントに座標を正確に割り当てるには、ルールが必要です。ジオイド上の特定のポイントを球体に投影する方法です。
このようなルールのセットは、世界のすべての地理的マップに共通する必要があります。そうでない場合、異なるシステムの同じ座標は、地球の表面上の異なるポイントを示します。 現時点では、ほぼすべての地理サービスが単一の座標点割り当てシステム-WGS 84(WGS = World Geodetic System、84-標準の採用年)を使用しています。
WGS 84は、いわゆる 参照楕円体は、計算の便宜上、座標が与えられる表面です。 この楕円体のパラメーターは次のとおりです。
-半長軸(赤道半径):a = 6378137メートル;
-圧縮:f = 1 / 298.257223563
赤道半径と圧縮から極半径を取得することが可能です。これは短軸でもあります(b = a *(1-f)≈6356752メートル)。
したがって、3つの座標は、地球の表面上の任意のポイントに関連付けられます:経度と緯度(参照楕円体上)およびその表面上の高さ。 2004年、WGS 84は、地球の重力モデル(EGM96)標準によって補完されました。これは、高さを測定する海面を指定します。
興味深いことに、WGS 84のゼロ子午線はまったくグリニッジではありません(グリニッジ天文台の通過機器の軸を通過します)が、いわゆる IERS基準子午線、グリニッジの東5.33秒を実行します。
フラットカード
座標を決定する方法を学んだとします。 ここで、モニター画面に蓄積された地理的知識を表示する方法を学ぶ必要があります。 しかし、これは不運です-世界には球形のモニターはあまり多くありません(ジオイドの形のモニターは言うまでもありません)。 どういうわけか地図を平面にマップする必要があります-それを投影します。
最も簡単な方法の1つは、球体を円柱に投影し、この円柱を平面に向けることです。 このような投影は円筒形と呼ばれ、それらの特徴的な特性は、すべての経線が地図上に垂直線として表示されることです。
球体の円柱への投影は多数あります。 最も有名な円筒図法は、メルカトル図法です(フランダースの地図製作者および地理学者のジェラルドクレーマーの名前で、ラテン名のメルカトル図法でよく知られています)。
数学的には、次のように表現されます(球体の場合):
x = R・λ;
y = R・ln(tg(π/ 4 +φ/ 2)、ここでRは球の半径、λはラジアン単位の経度、φはラジアン単位の緯度です。
出力では、通常のデカルト座標をメートル単位で取得します。
メルカトル図法の地図は次のようになります。
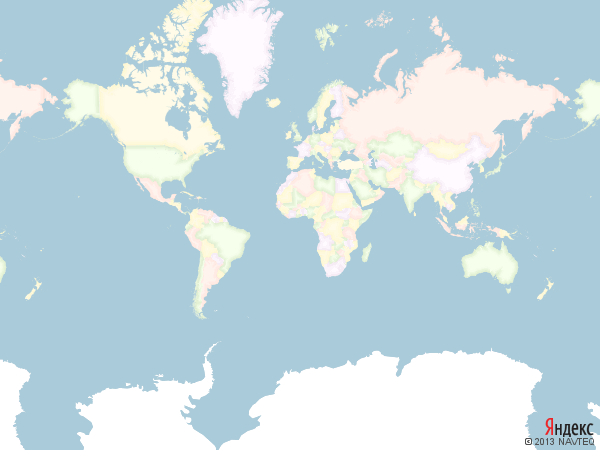
メルカトル図法がオブジェクトの形状と領域を非常に大きく歪めることは容易にわかります。 たとえば、地図上のグリーンランドはオーストラリアの2倍の面積を占めていますが、実際にはオーストラリアはグリーンランドの3.5倍です。
なぜこの投影法は非常に優れているので、大きな歪みにもかかわらず非常に人気があるのですか? 実際、メルカトル図法には重要な特性があります。投影するときに角度を保持します。
カナリア諸島からバハマまで航海したいとしましょう。 地図上に出発地と到着地を結ぶ直線を描きます。
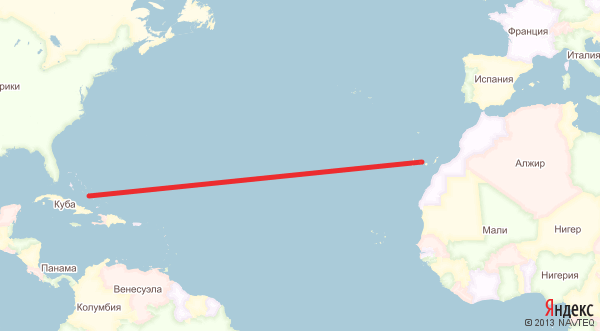
円筒図法のすべての子午線は平行であり、メルカトル図法も角度を保持するため、線はすべての子午線を同じ角度で交差します。 これは、この線に沿って泳ぐことは非常に簡単であることを意味します。航海中、船舶の進路と極星への方向(または正確ではない磁北への方向)を同じ角度に保つだけで十分です。通常の分度器で測定します。
同じ角度ですべての経線と緯線を交差する同様の線は、ロキソドロームと呼ばれます。 メルカトル図法のすべてのロキソドロームは、地図上に直接表示されます。この素晴らしい特性により、マリンナビゲーションに非常に便利であり、船員の間でメルカトル図法の人気が広まりました。
言われたことは完全に真実ではないことに注意する必要があります:球体を投影し、ジオイドに沿って移動すると、方向角は正確に決定されず、そこに航行しません。 (矛盾は非常に顕著である可能性があります-結局、地球の赤道半径と極半径は20キロメートル以上異なります。)楕円体は、角度を保存して投影することもできます。基本機能で)。 楕円体上のメルカトル図法の数学の完全かつ詳細な説明は、 ここにあります 。
Yandexでカードの作成を開始したとき、楕円形のメルカトル図法を使用することは理にかなっています。 残念ながら、他の多くの地図作成Webサービスはそうは思わず、球面投影を使用しています。 そのため、長い間、Yandexマップの上にOSMなどのタイルを表示することは不可能でした-タイルは、y軸に沿って発散し、極に近づくほど顕著になりました。 API 2.0では、潮流に逆らうことなく、任意の投影でマップを操作し、同時に異なる投影で複数のレイヤーをマップ上に表示できるようにしました。これはより便利です。
調査タスク
ロクソドロームの周りを移動するのは非常に簡単ですが、この単純さにお金を払う必要があります。ロクソドロームは、最適でないルートに沿って旅をします。 特に、平行線に沿ったパス(赤道でない場合)は最短ではありません!
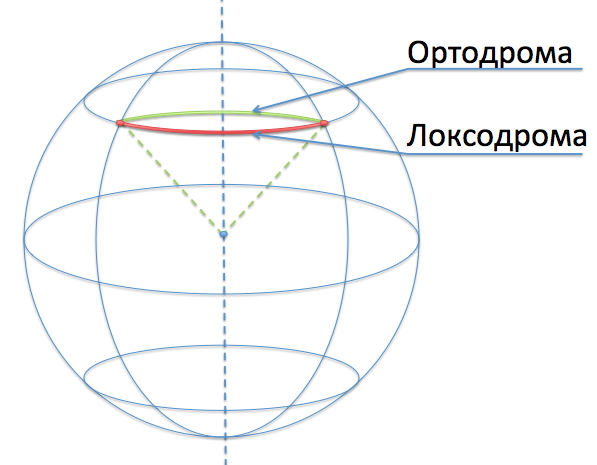
球の最短経路を見つけるには、これらの2点を通る球の中心に中心を持つ円を描く必要があります(または、同じことですが、2点と球の中心を通る平面で球を交差させます)。
最短経路が直線セグメントに入るように、球を平面に投影することは不可能です。 もちろん、メルカトル図法も例外ではありません。メルカトル図法のオルソドロームは、大きく歪んだ弧のように見えます。 メルカトル図法の一部のパス(極を通る)は正しく表示できません。
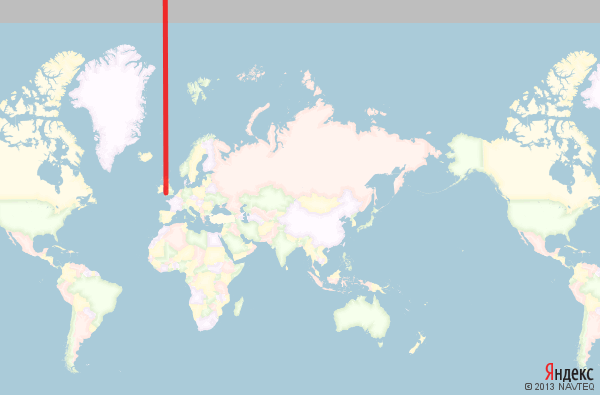
これは、アナディリからカーディフまでの最短経路が投影される方法です。最初に無限に北へ飛行し、次に無限から厳密に南へ戻ります。
球に沿った移動の場合、最短経路は球面三角法の装置を使用して非常に簡単に構成されますが、楕円体の場合、タスクは非常に複雑です-最短経路は基本関数で表現されません。
(もちろん、この問題はメルカトルの球面投影法を選択しても解決できないことに注意してください-最短経路は基準楕円体WGS 84上に構築され、投影パラメータに依存しません。)
Yandex.Maps APIバージョン2.0の開発中に、次のように最短パスの構築をパラメーター化するという難しいタスクに直面しました。
-組み込み関数を使用して、楕円WGS 84の最短経路を計算するのは簡単でした。
-最短経路を計算する独自の方法で独自の座標系を設定するのは簡単でした。
結局のところ、Maps APIは地球の表面の地図を表示するだけでなく、たとえば月の表面やゲームの世界の地図を表示するためにも使用できます。
一般的な場合に最短経路(測地線)を構築するには、次の単純で気取らない方程式を使用します。
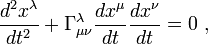
ここに
 -いわゆる 基本計量テンソルの偏導関数によって表されるクリストッフェル記号。
-いわゆる 基本計量テンソルの偏導関数によって表されるクリストッフェル記号。
マッピング領域をパラメータ化するような方法でユーザーを作成することは、私たちにとってやや非人間的だと思われました:)。
したがって、私たちは地球とユーザーのニーズにより近い、別の方法で進むことにしました。 測地学では、最短経路を構築する問題は、いわゆる 最初の(直接の)調査タスクと2番目の(逆の)調査タスク。
直接測地線タスク:開始点、移動方向(通常は方向角、つまり北方向と移動方向の間の角度)および移動距離を指定します。 終点と最終的な移動方向を見つける必要があります。
逆測地問題: 2つのポイントが与えられます。 それらの間の距離と動きの方向を見つけることが必要です。
移動方向(トラック角度)は、パス全体で変化する連続的な関数であることに注意してください。
これらの問題を解決する機能を自由に使用することで、Maps APIで必要なケースを解決できます:距離の計算、最短経路の表示、地球表面での円の構築。
ユーザー座標系用の次のインターフェイスを発表しました。
solveDirectProblem(startPoint、方向、距離)-いわゆる最初の(直接)測地線問題を解決します。指定されたポイントを指定された方向に残し、指定された距離を折りたたむことなく渡します。
solveInverseProblem(startPoint、endPoint、reverseDirection)-いわゆる第2(逆)測地問題を解決します。マッピングされるサーフェス上の2点間の最短ルートを構築し、移動の距離と方向を決定します。
getDistance(point1、point2)-2つの指定されたポイント間の最短距離(測地線に沿った)を返します(メートル単位)。
(距離の計算が逆問題を解くよりもはるかに高速に実行できる場合、getDistance関数は個別に強調表示されます。)
このインターフェイスは、ユーザーが非標準のサーフェスをマッピングしたり、非標準の座標を使用したりする場合に実装するのに十分簡単に思えました。 パートでは、通常のデカルト平面と参照楕円体WGS 84の2つの標準実装を作成しました。2番目の実装では、 Vincentiの式を使用しました。 ところで、私はこの暴走したロジックを直接実装しました。彼に挨拶します:)。
これらの測地機能はすべて、バージョン2.0.13以降のYandex.Maps APIで利用できます。 ようこそ!