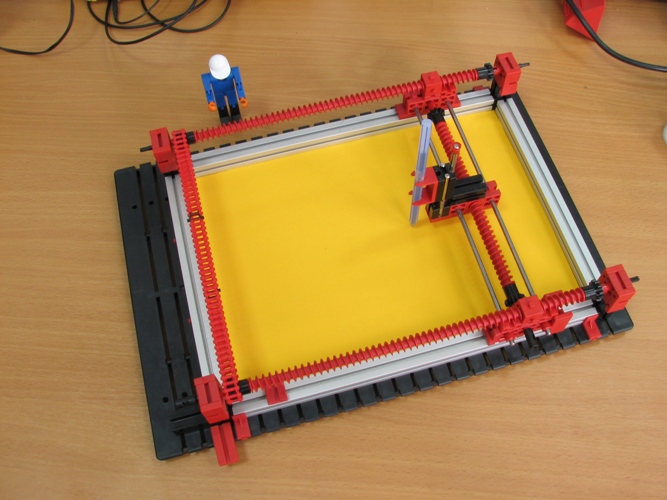
そこで、プログラム可能なプロッターを構築しています。
プロッタには、X軸とY軸に沿って移動できるキャリッジがあり、このキャリッジにツールが取り付けられています。 それは、切断用の羽またはナイフであり得る。 このツールは、別のドライブによって材料に固定されています。このドライブは、Z軸として機能します。
01.建設。 ベースとして、プラスチックプレートを使用します。 フレームは、X軸のガイドと組み合わされて、アルミニウムのプロファイルで作られており、これもfischertechnik部品リストにあります。
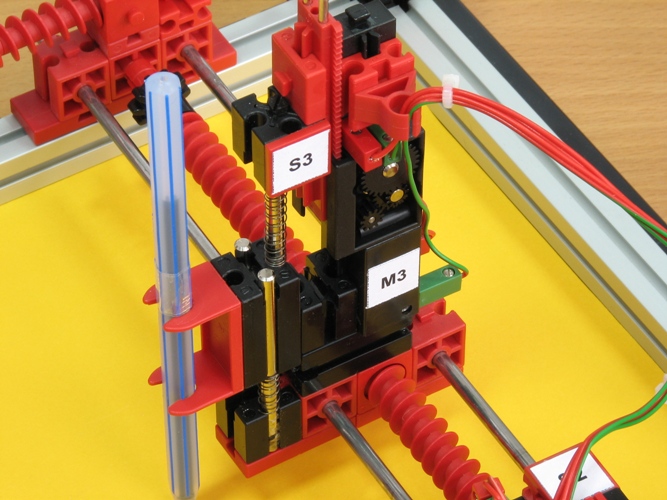
02.サーボモーター。 キャリッジをX軸とY軸に沿って移動するために、スクリューペアとエンコーダー付きサーボモーターを使用します。 75 imp / revのエンコーダー分解能とネジの5 mmピッチにより、位置決めシステムの線形分解能は15 imp / mmになります。 これは私のアマチュアの仕事には十分です。

03. Z軸:ギアラックを備えたツールは、ツールをブレードに送ります(Z軸)。 エンコーダーはないため、位置を制御するために、ドライブをシャットダウンするためのリミットスイッチとタイマー遅延が使用されます。
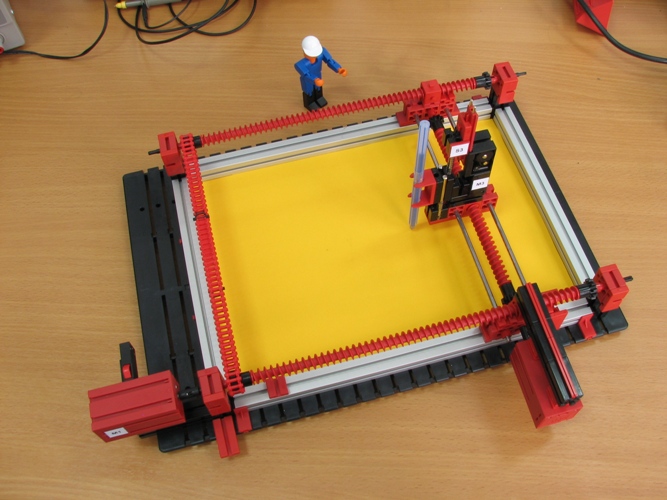
04.メカニズムアセンブリ。
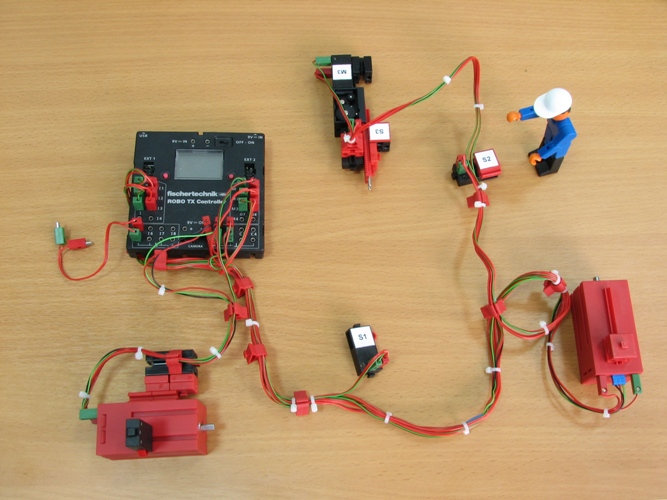
05.電気配線。 さて、電気のインストール次第です。 ワイヤは、ネジ留め式端子付きのプラグを使用して接続されます。
06.機構が組み立てられ、ワイヤが接続されます。

07.今、制御システムの番です。 前回 、制御にArduinoを使用しました。 今回は、脳はfischertechnikコンストラクターのROBO TXコントローラーになります。
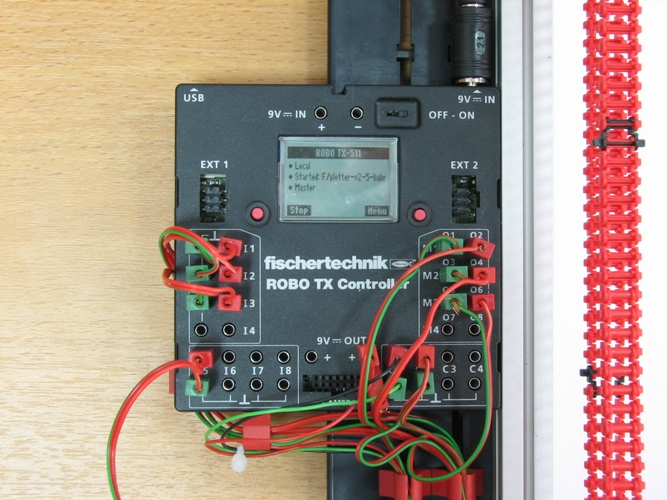
08. ROBO TXコントローラーのプログラムは、視覚的なプログラミング言語でアルゴリズム図の形式でコンパイルされています。 さらに、この言語は、コンピューターサイエンスの教科書にあるフローチャートや、対応するGOST 1と非常によく似ています。 ソフトウェアのこの機能は、プログラミングの基礎を学ぶ学生にとって非常に役立つと思います。
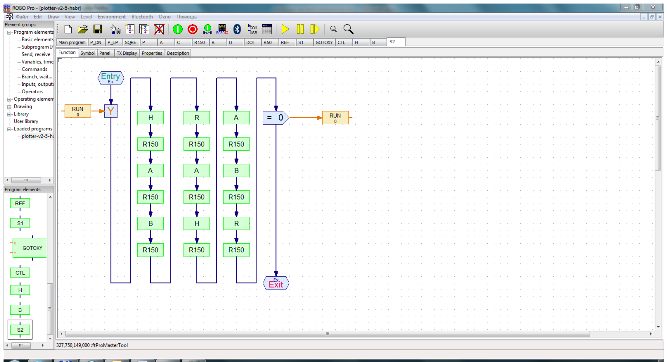
「HABRAHABR」という1行を出力する簡単なプログラムを作成しました。 キャラクターごとに別々のサブルーチンを作成しました。 合計4つのサブルーチン。
ここで、私がしたことを見ることができます。
今、ROBO TXコントローラー用のGコードインタープリターを実装したいと思っています。 その後、ファイルをCADシステムからGコードに転送し、機能的な観点からCNCマシンの完全に機能するモデルを取得することができます。
1-GOST 19.701-90アルゴリズム、プログラム、データ、システムのスキーム。 シンボルと実行のルール。
この記事のfischertechnikコンストラクターは、PAKPAKストアから親切に提供されました。