以下では、単に「モーター」と略します。
簡単に説明しますが、彼の詳細については、 Wikipediaまたはこちらで読むことができます 。
最も簡単なオプション:
4つの電磁コイルA、B、A '、B'があります。 電流が流れると磁石になります(コイルAとBは電流の「順」方向、「A」と「B」-「逆」方向にアクティブになります)。
歯付きのホイールがあります(たとえば、1本の歯-矢印)。
クローブは、電流が流れるコイルに引き付けられます。 したがって、コイルの電流が連続してオンになると、矢印が回転します。
この動きをよりスムーズにするために、クローブを追加したり、リールを使用したり、両方を使用したりできます。原理は同じままで、推力と回転角度のみがオン/オフの1つに対して変更されます。
通常、次の構成が使用されます。コイルは回転の周囲に沿って4つ配置され、4つごとに歯があり、ギアとその周りに多くのコイルがあります。
4つのコイルと1つのクローブを備えた最も単純なモデルを考えます。
矢印を回転させる方法を考えてみましょう。
その初期位置がBにあるとします。
1.最も明白なもの:
Aをオンにします。矢印はAの反対側で停止します。
Aをオフにし、Bをオンにします。矢印はBに向かい、反対側で停止します。
Bをオフにし、Aをオンにします:矢印は既にAで停止します。
Aをオフにし、Bをオンにします。矢印はBに移動し、反対側で停止します。
B 'をオフにし、Aをオンにします。矢印はAの反対側で止まります。
毎回、90度の回転が、それぞれ完全な円で4回行われます。
高速ですが、非常にシャープです。
悪い点:
シャープ、うるさいので。
そのため、負荷に応じてすぐに大きな回転角度が発生し、慣性が大きくなり、加速矢印がすぐに停止しないため、現在のコイルをオフにして次のコイルをオンにする前により長い遅延が必要です。
上記の問題のために、速度を高くしすぎると、回転を制御できなくなり、何かが飛び散ったり、動きが非常に奇妙になります。
良い点:比較的簡単に実装できます。
2.やや目立たない解決策:
AとBをオンにします ':矢印はAとBの間で停止します。ちょうど中央です。
Bをオフにし、Bをオンにします。矢印はAとBの間で固定されます。
Aをオフにし、Aをオンにします。「BとAの間の矢印」。
Bをオフにし、B 'をオンにします。矢印はA'とB 'の間で停止します。
A 'をオフにし、Aをオンにします:B'とAの間の矢印など。
一度に-同じ90度、完全な円も4回。
鋭すぎる。
悪い点:
前の方法と同じ
さらに、実装するのは少し難しくなりますが、それほど多くありません。
どちらが良いですか:
同時に、2つのコイルが同時に「力を発揮」します。つまり、牽引力は以前の方法よりもはるかに優れています。
したがって、しきい値速度+慣性は、その後制御を失い、最初の方法と比較して高くなります。
3.ステップを粉砕します。
各モーターについて、オン/オフ状態だけでなく、特定の状態テーブルがあるとします:
a)
0%
50%
100%
ここで、50%はコイルの電流強度が最大値の50%であることを意味します。
さらに小さくできます:
b)
0%
25%
50%
75%
100%
またはさらに小さい。
シーケンスは次のようになります。
B '100%、A 0%
B '75%、A 25%
B '50%、A 50%
B '25%、A 75%
B '0%、A 100%
ペアAB、B-A '、A'-B'、B'-Bでも同じ
悪い点:
実装がより困難です。
どちらが良いですか:
ステップが小さいため、ノイズやガラガラが少なくなり、動きがスムーズになります。
慣性と制御の喪失に関する問題が少ない。
あなたはそれをさらに小さくすることができ、動きはさらにスムーズになります。
4.アナログ方式で電流を供給します。
いわば、分割の頻度が無限に増加するという制限的なケースです。
B '100%から0%に滑らかに変化し、Aが0%から100%に変化します。したがって、すべてのペアAB、B-A'、A'-B '、B'-Bについて
良いこと:
非常に滑らかで、良好な制御、良好なトラクション。 そして沈黙。
悪い点:
アナログ
特許を取得しています。
5.次のオプションを使用します。
BとAをオンにします:BとAの間の矢印。
B 'をオフにする:Aの矢印
Bをオンにします:AとBの間の矢印。
A:Bの矢印をオフにします。
A ':A'とBの間の矢印をオンにします。
B:Aの矢印をオフにします。
B 'をオンにします:B'とA 'の間の矢印。
A ':Bの矢印をオフにする
A:B 'とAの間の矢印をオンにします。
等
ドラフトのみがステップ3の「0%、50%、100%」と異なります。 5が強いです。
方法1、2、3、5は標準で、指定もあります。
「コイルの近く」の位置を1、「コイルの間」の位置を2と考えると、次の表記が明確になります。
モード1は1フェーズ(フルステップ)と呼ばれます(矢印はフェーズ "1"でのみ停止します)が、ほとんど使用されていません-推力は一般的に悪いです。
モード2:2段階(フルステップ)(段階「2」のみ)。
モード5:1-2フェーズ(ハーフステップ)(「1」と「2」で停止)。
モード3:分割周波数に応じて:
4(「コイルの前」から「次のコイルの前」までの位置は4ステップに等しい):2W1-2フェーズ(2 * 2 = 4)
8:4W1-2フェーズ(4 * 2 = 8)
ロシア語では、マイクロステップ。
モード3-aは使用されていないため呼び出されません。また、方法4は特許を取得しています。
したがって、コイルAおよびBの電流強度の時間依存性(A 'およびB'は負の電流値に対応)はほぼ同じである必要があります(1-2相の場合)。

運転手
もちろん、対応する強さの電流を目的のシーケンスでモーターに直接供給することも、制御を大幅に簡素化するチップを使用することもできます。 このようなチップはドライバーと呼ばれます。 必要なモード設定を(レジスタで)設定し、ドライバーにタイマー信号を絶えず送信すると、ドライバー自体が目的の構成の出力を生成します。
必要なのは、ドライバー自体(モーター付き)、十分な周波数のタイマー、および制御デバイス(プロセッサー、マイクロコントローラー、またはfpga)です。
一般に、ドライバーにはモードの設定を担当するピンと制御ピンがあります。
たとえば、次のように:
モード自体

最大電流(仕様による最大値から)。

制御ピン:タイマー、回転方向(時計回り、反時計回り)、リセットピン、有効ピン。

CW-時計回り
CCW-反時計回り
初期モード-「初期」モードに対応するコイルの事前定義された状態。 モードによって異なる場合があります。 たとえば、1-2相の場合はAで100%、Bの場合は0%、2相の場合はAで100%、Bで-100%です。 モーターをこのモードでしばらく保持することにより、事前にわかっている特定の方法でモーターが回転することを保証します。 この状態からカウントダウンを開始できます(また、どの時点でモーターがどの位置にあるかを知る必要もあります)。
最後に、正しく設定されたモード(1-2フェーズなど)とタイマーが機能します。 ドライバーの出力は次のようになります。
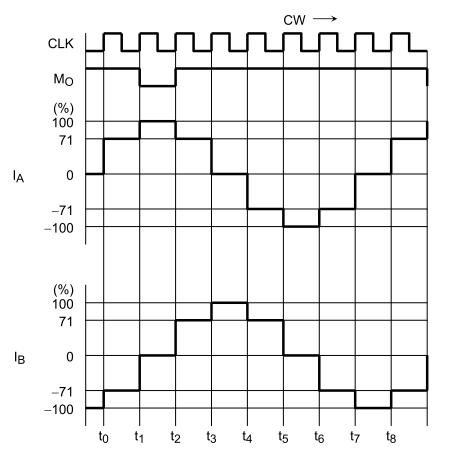
一般に、それですべてです。
たとえば、東芝TB6560AHQ / AFGのドライバーが使用されましたが、この記事の目的は詳細に入らずに一般原則を正確に伝えることであるため、詳細はそれほど重要ではありません。