しかし、私はこれらすべてに20ドル以上を費やしたくありませんでした。 確かに、材料のコストは考慮していませんでしたが、とにかく100ドル以下でした。

準備する
3D空間でポイントを見つけるには、いくつかの方法があります。
最も簡単な方法は、3つの数字を使用して、あるポイントの別のポイントに対する位置を記述することです。
この方法は、ほとんどのコンピューターモデルで使用されます。
別の方法は、3つの平面または平面と線を使用することです。
ご覧のとおり、最も簡単な方法は3番目の方法を使用し、その結果を最初の方法にすることです。
しかし、飛行機とそのポイントを見つける方法、疑問が生じますか?
判明したように、最初はハードウェアによって実装され、2番目はソフトウェアによって実装されます。
ハードウェア実装

まず、主なアイデアを説明してから、実装に進みます。 これは、独自のソリューションを見つけるのに役立ちます。
そのため、コンピューターがモデルを作成できるように、飛行機を見つけて、この飛行機の位置を何らかの方法で記録する必要があります。
多くの人がこれを行うために影の端を使用しますが、私は別の方法で行くことにしました。
非常に明るい緑色のレーザーを見つけました(持っていない場合は、通常のレーザーポインターからレーザーを使用できます)。
シリンドリカルレンズを通してレーザーを向けると、ラインになります。 この線を使って飛行機を見つけました。 これはうまく機能しますが、スキャナーのサイズはレンズのサイズによって非常に制限されることに注意してください。私のレンズは直径約3分の1インチで、スキャンされたスペースは約2 x 6 x 6に制限されます。 小さいレンズの方がうまく機能しますが、これは必要ありません。
本体

まず、スキャナーを配置するボックスを作成する必要があります。 箱の底壁と後壁は、合板の側面であるメラミンで作られています。 すべてが終わった後、メラミンは不要だと判断しました。合板を取り、白く塗ってください。 これにより、数ドル節約できます。
レーザー設定
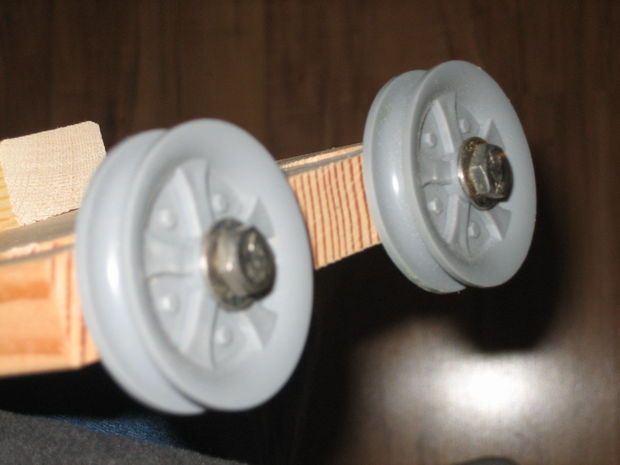

次のステップは、レーザーの取り付けと取り付けです。
古い木材を使用しました。 ローラーは、レーザーが窓の上部のレールに沿って回転するように取り付けられています。 そこで、レーザーとレンズは、光の面が窓の上下に垂直になるように取り付けられています。
カメラの設置
カメラは、被写体の上の側面に取り付ける必要があります。 これにより、レーザーラインが適切に逸脱します。
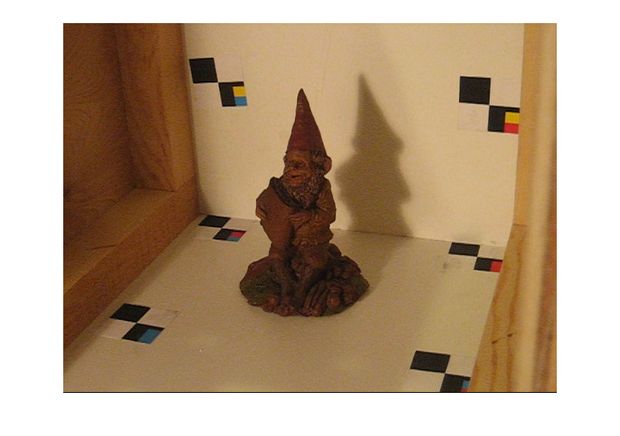
これで、オブジェクトを配置できます。 私はノームを使用しました。 カメラを見て、レーザーが被写体の上で著しく偏向していることを確認してください。 下の写真を見て、私の意味を理解してください。
ソフトウェア

ソフトウェアの背後にある考え方も非常に簡単です。 多数のドットがあり、それぞれがカメラのピクセルに対応しています。 秘Theは、2つのスペース間でポイントを変換する方法を学ぶことです。 結局のところ、これはかなり単純な方程式に要約されます。
スキャン中
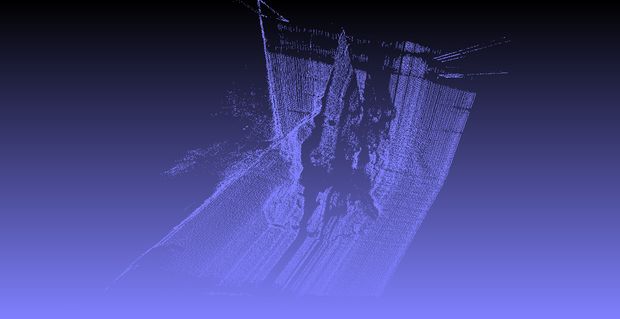
スキャナーを試してみましょう!
これで、オブジェクトの一部のみがスキャンされます-カメラに向けられた部分です。 ただし、スキャナーを調整できます。
さらなる開発
実装できるアイデアがいくつかあります。
- 自動化 この場合、Matlabは最良の選択ではないかもしれません。 独自のソフトウェアを作成して、モーターを追加できます。
- カメラの回転を追加します 。 自動化に加えて、これにより完全な3Dモデルを作成できます。
- 理想的には、ソフトウェアはノイズを除去する必要があります。
翻訳者から:ソースコードが必要な場合は、元のテキストの作成者に連絡してください。