このロボットの「ソフト」は、ハードケースがないという意味で呼ぶことができます。 私たちは皆、ロボットが産業プラントであろうとヒューマノイドデバイスであろうと、剛体を持っているという事実に慣れています。 今日のほとんどのロボットは、数千ではないにしても数百の部品を含む複雑なシステムです。 しかし、ハーバード大学では反対の方向に進むことを決定し、弾性体を備えたデバイスを作成しました。 このような装置の動作原理は、ヒトデなどの無脊椎動物の動きの原理に似ています。
確かに、これまでのところ、ハーバード大学の専門家は「ロボット」の動きの原理にのみ取り組んでおり、これまで議論されたことはありません。 「ソフト」ロボットの利点は、安定性、比較的安価であることです(構造に使用されるプラスチックは安価です)。 さらに、このようなロボットは実際には落下しても損傷を受けず、侵入するものは何もありません。ベアリング、ジョイントなどはありません。
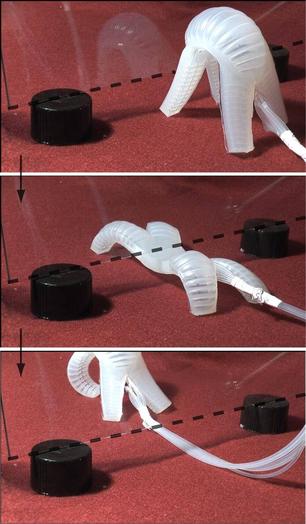
移動のために、このロボットは圧縮空気を使用し、「体」のさまざまな部分の圧力変化を使用します。 ロボットの内部-異なる圧力のセクションを作成できるバルブのシステム。 圧力の影響下で、プラスチックが変形し、「柔らかい」ロボットが動きます。 これまでのところ、科学者たちは4つの「手足」を備えたプロジェクトを提案してきましたが、将来はさらに多くの可能性があるでしょう。 ロボットは非常によく動いており、科学者はそれをガラスの下に通すことさえできました(プレビュー写真)。
もちろん、言葉の意味では、このプラスチックの作成はロボットとはほとんど言えませんが、さまざまな種類の電子部品(動きを妨げないように小型)を追加し、圧縮空気の供給を改善すると、印象的な結果を得ることができます。 これまでの問題は、まさにロボットの動きのために圧縮空気を供給する必要があることです-そのようなデバイスが自律と呼ばれることはありそうにありません。 しかし、おそらく、すべてが解決され、しばらくして科学者はより完璧な「ロボット」を提示するでしょう。
ワシントンポスト経由