前の記事で、クアドロコプターを構築するための一連の詳細について説明しましたが、今度はセンサーと脳について説明します。
センサーとその製造方法
最も簡単なオプションは、4つのメインセンサー(9 DOF )を備えた完成したスカーフを購入することです。
- ジャイロスコープ-角加速度測定用
- 加速度計-加速度と重力を測定するため(実際、傾斜角を見つけることができます)
- バロメーター-高度を測定し、同じ高度でヘリコプターを保持します
- 磁力計(コンパス)-進行方向を保持します
ちょうど今、別のスカーフが登場しました。4つのセンサーに加えて 、自律飛行に役立つGPS受信機があります。
センサー付きのボードだけを購入することに決めた場合(正しい選択をしました!)、センサーについてはもう読むことはできませんが、突然加速度計付きのジャイロスコープがすでにある場合、またはWii Motion Plusを注文するときに運で遊びたい場合中国の店、そして記事のこの部分を最後まで読んでください。
ITG3200ジャイロスコープを入手します
最近、ゲームコンソール用のWii Motion Plusをdealextremeやbuyincoinsなどのサイトから購入し 、それを開いて、どのジャイロチップがそこで使用されているかを確認します。ほとんどの場合、ITG3205、ITG3200です。
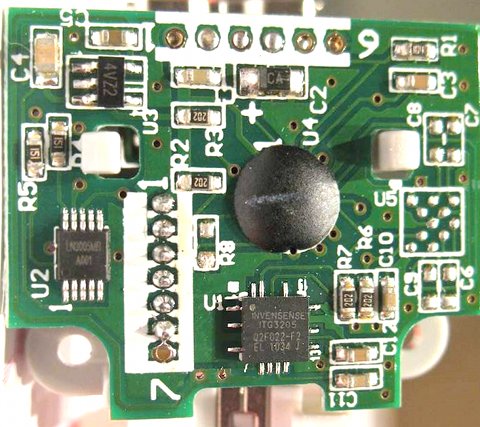
フォーラムhttp://forum.xufo.net/bb/viewtopic.php?p=171796の画像を使用します
ボードが次のように見える場合、あなたは非常に幸運であり、次のステップはこのWMPを良いジャイロに仕上げることです:
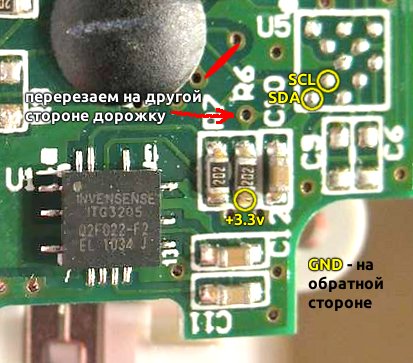
トラックがカットされた場所は赤でマークされ、裏面にもチップにつながるトラックがあります。また、切断されており、裏面にはGND配線(グランド、共通)をはんだ付けするのに便利な場所があります
BMA020またはBMA180加速度計の入手
そして、ここではすでにより複雑でシンプルになっています。幸運なことに、 rcdesign.ruフォーラムの親切なユーザーが、薄い両面テープに貼った最小限の結合でスカーフにBMA020をはんだ付けしました。
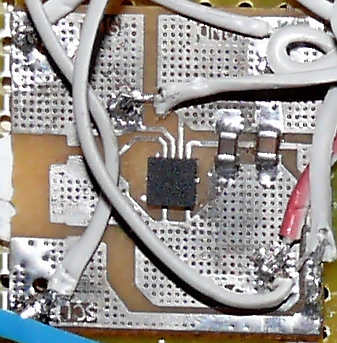
センサーを個別に検索して、同様のスカーフを自分で作成するか、友人に尋ねるか、BMA020またはBMA180センサーを備えた既製のスカーフを購入できます。
その他のセンサーオプション
実際、 I2Cバスを備えた加速度計を備えた利用可能なジャイロスコープはすべて動作しますが、コードの対応する部分を書き換えるか、L3G4200Dジャイロスコープやadxl335アナログ加速度計など、 MultiWiiプロジェクトから既製のコードを挿入する必要があります。 ただし、センサーの軸の方向を変更し(コード内の記号と軸を変更する)、振動と戦わなければならない場合があります。
脳の組み立て
インストールを簡単にするために、たとえば、プロトタイピングボードに配置できるものはすべて次のようになりました(見た目は美しくありませんが、動作します。左上の通信モジュールは使用されません)。

ファームウェアは定期的に変更されるため、接続のピン配列はわずかに異なる場合がありますが、執筆時点では、モーター、センサー、レシーバーなどです。 このように接続する必要があります(リリースノートから):
| モーター
(上面図、上部のヘリコプターの前、 回転方向と対応するプロペラは、この写真またはこれで 見ることができます) | |
|---|---|
| 左前 | 2 |
| フロント右 | 5 |
| 左後 | 6 |
| 右後 | 3 |
| 受信機
(少なくとも最初の4つは、IDEループからコネクタを取り、レシーバーへの余分な挿入を切断できます) | |
| スロットル | A8 |
| ロール | A9 |
| ピッチ | A10 |
| ヨー | A11 |
| モード(Aux1) | A12 |
| Aux2 | A13 |
| Cam1 | A14 |
| Cam2 | A15 |
| 脳と受信機の力 | |
| Arduinoは、速度コントローラ(電力変換器がある場合)、USBとVinに電力出力をはんだ付けすることによって電力を供給することができます、別のオプションは、ボード上の特別な電源コネクタを介してバッテリーから直接供給することです | |
| レシーバーは、対応する出力+ 5vおよびGNDを介してArduinoから給電されます | |
| その他 | |
| コマンドラインモードへの切り替え(そう、コンソールがあります)と設定
便宜上、ジャンパーまたはスイッチを入れることができます | GNDでのA5短絡 |
| GPSモジュール | RX2、TX2 |
| Xbeeモジュール | RX3、TX3 |
| ソナー/レンジファインダー | 9-tx、10-エコー |
| LED(直列の抵抗器を忘れないでください) | 13.30.31 |
ファームウェアのセットアップとダウンロード
記事のこの部分は無関係になる可能性があるため、 ArduCopter Megaフォーラムスレッド(通常のArduino(テスト)用のポート)にご注目ください
- ファームウェアを含むアーカイブをダウンロードして解凍します
- ライブラリフォルダーは、Arduino IDEの同じフォルダー(arduino-0022)に(交換して)コピーする必要があります。
- ライブラリー/ AP_ADC_ADS7844.cppファイルのAP_ADCフォルダーで、センサーのタイプを選択します。オプション#define FFIMU、#define ALLINONEまたは同時に#define ALLINONEおよび#define BMA_020をITG3200およびBMA020センサーのバリアントに対して選択します。
- (私のような)バロメーターがない場合、ライブラリ/ APM_BMP085 / APM_BMP085.cppファイルでこのセンサーを使用してI2Cバスを操作するためのコードをコメント化する必要があります。
- Arduino IDEでMegaPirateフォルダー内のファイルを開きます
- APM_Config.hタブで、ヘリコプターのタイプを選択します。#define FRAME_CONFIGの後に、オプションの1つを挿入します。QUAD_FRAMETRI_FRAME HEXA_FRAME Y6_FRAME OCTA_FRAME、およびフレームの向きのタイプ#define FRAME_ORIENTATION、PLUS_FRAMEまたはX__RRAMEを設定します
- GPSがない場合は、最初に#define GPS_PROTOCOLの値をGPS_PROTOCOL_NONEに変更して、GPSが初期化されるまで10〜15秒待たないようにしてください(ない場合)。
- これで、Arduino Megaを接続して、このスケッチをコントローラーにアップロードできます
ヘリコプターのセットアップ
スケッチファームウェアをArduinoに正常にダウンロードした後、セットアッププログラムをダウンロードして (注意、Windowsでのみ動作し、LinuxでWineを使用すると非常に曲がります)、A5コンタクトをGNDで閉じることができます 。
プログラムを起動した後、[オプション]メニューで、Arduino COMポートを選択します。

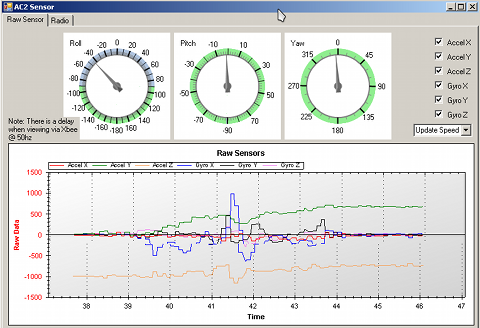
[アクション]メニューで、[AC2セットアップ]を選択します
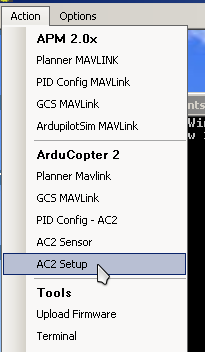
そして、クリックして指示に従う必要がある巨大なボタンが表示されます。リモートコントロールハンドルを最小値と最大値に移動するように求められるテキストのある最初のウィンドウと、次のことを確認するように求められる別のウィンドウを見逃さないことが特に重要ですヘリコプターはセンサーを較正するためのレベルです。
設定が完了したら、A5をGNDで開き、メニューで[AC2センサー]を選択して[Rawセンサー]タブでセンサーの妥当性を確認できます。センサー付きのハンカチの回転は明確に解決されるはずです。コード内のセンサーまたは係数に問題があります。
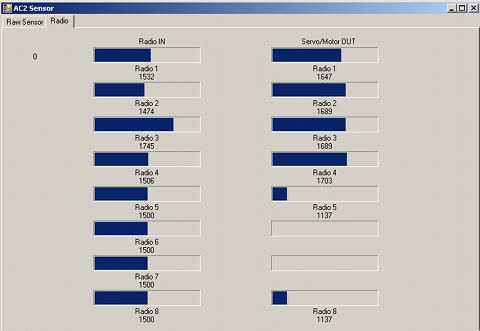
次のタブで受信機の動作を確認することも価値があります。レベルが正しく移動する場合は、スロットルスティック(モード2リモコンの左)を右に2秒間下げます(バッテリーが接続されておらず、プロペラがないことを願っています)。コントローラのLEDが点滅し始めます。 そして、スロットルスティックをゆっくりと上に動かします。左の列では、レベルはほぼ等しく増加します。
結果
さて、それはすべてのようです=)今、あなたはプロペラを固定することができます(どのもの、どの回転を混ぜないで、モーターが正しい方向に回転していることを確認してください)左のノブを2秒間上下に傾けて、ゆっくりとガスを追加します。 ヘリコプターが離陸した場合-すでに良好で、揺れ始めている場合は、アクションメニューでPIDを調整する必要があります。このため、PID構成-AC2を選択し、桁数に恐怖を感じ、自分で値の調整を開始します。 入力することで実際に行われたため、これを行う方法について話すことはできませんが、パラメーターPから始める価値があります。これらの設定でうまく飛んでいます:

着陸後、左のジョイスティックのハンドルを押し下げてモーターをオフにし、同じ2秒間左に動かして、ステータスLEDが点滅しなくなることを忘れないでください 。
ヘリコプターの構築と設定に成功し、フォーラムで新しいチップについて読むことを忘れないでください 。
ヘリコプターの茂みへの落下の小さなビデオ
GoProを搭載した適切なフライト
次の記事は完全に自律的な飛行に関するものかもしれませんが、1か月以上前には気をつけてください。