私たちは引き続き脳を伸ばし、新しいスキルを身につけます。
ジャイロスコープと加速度計を拷問している間、安定化機能と他の機能を2つの独立したプロセッサに分割するという仮定を考慮して、装置のより詳細な図が頭と紙に現れました。
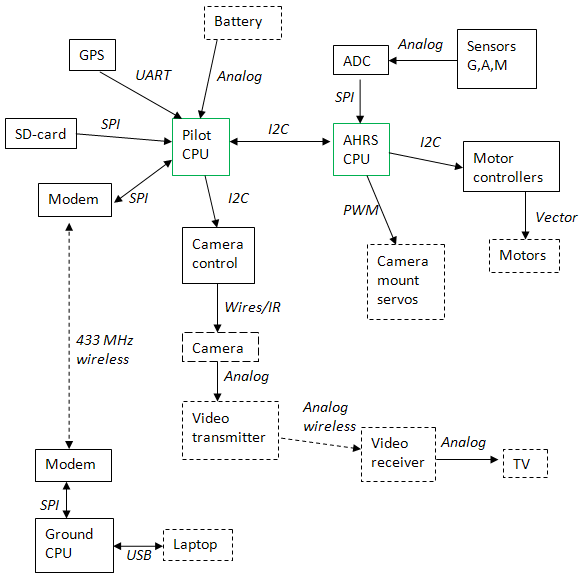
クアッドコプターのコンポーネント
AHRS CPU -ADC(たとえば、 SPIバスで動作する2つの安価なMCP3208 )からセンサーからデジタル化されたデータを受信し(目には1秒間に50回で十分です)、それらをフィルターし、デバイスの傾斜を計算し、回転を安定させるために必要なプロペラ速度を計算します(おそらく、最も単純で最も一般的なPID制御アルゴリズムによって)、これらの速度の値をI2Cバス上のモーターコントローラーに送信し、次にモーターにフィードします(
センサー -前述の3つのジャイロスコープ、3軸加速度計、3軸磁力計(地面に平行な平面で優れた方向を示します)、オプション-高さを測定するための圧力センサー。 すべてのセンサーは簡単にアナログで使用でき、安価であり、上記の2つの超小型回路は高速ADC変換に使用されます(一方には十分なチャンネルがありません)。
パイロットCPUは、2番目のマイクロコントローラーをデバイスとカメラの希望の傾斜に設定し、地上との通信を提供するオートパイロットです。 また、バッテリーの電圧を測定し、GPSから座標を受け取り(SDカードに記録されたキーポイントに飛行したり、ルートを記録したりするため)、カメラコントローラーにコマンドを送信します。
カメラ制御 - カメラの制御 (シャッター、ズームなど)に役立つマイクロコントローラー。 IRを介してカメラにコマンドを送信するか、有線で直接送信できます。
ビデオ送信機 - 標準のものを使用するのが最も便利です。これはセキュリティビデオシステムで使用されます。
無線モデム -ZigBeeプロトコル(2.4 GHz)で実行されている一般的なX-Beeを使用できますが、CC1100チップセット(433 MHz)に基づく一部のモデムははるかに安価で、優れた特性と詳細なデータシートを備えています。
ラップトップはコントロールパネルとして(およびデバイスのステータスを表示するために)使用され、モデムと通信するには別のマイクロコントローラーが必要になります。
メインボード設計
私たちの目的では、2つのATmegaマイクロコントローラーの処理能力で十分です(他のユーザーにはソフトウェアの作成方法がまったくわからない)、それらのバインディングは最小限です。 マイクロコントローラの入力/出力ポートの標準的な配線をコネクタに引き込み、そこに周辺機器をドッキングボードに取り付けます。
重要な点は、周辺機器が異なる電圧で動作することです。サーボマシンとモーターコントローラーは5 V、モデム、gps、センサー、SDカードは3.3です。 幸いなことに、ストレス分布は有益であることが判明しました。 マルチコプターの安定化を担当するマイクロコントローラーは5 Vで動作し(これにより、16 MHzの周波数で使用できるようになります)、モーターコントローラーにつながる5電圧I2Cバスにも接続され、5電圧ADCに接続された5電圧SPI一方、ADCは3ボルトのセンサーからの信号を3ボルトのリファレンスと比較し、すべてが適合するようにします)。 マイクロコントローラのパイロットは3.3 V(クロック周波数を8 MHzに制限しますが、もう必要ありません)で動作し、3.3 Vバスを介して残りの周辺機器に接続されます。 問題は、2つのマイクロコントローラーを接続する方法です。 幸運にも私たちに微笑みました。2本のワイヤと簡単な電圧インターフェイスのみを備えた、おおよそ無料のI2Cバスがありました。
それ以前は、私はほとんど電子機器を扱っておらず、多くは私にとって新しいものでした。 しかし、私の仲間は私たちのマルチコプタービジネスで助けてくれました(説明されたスキームは彼との長い議論の中で生まれました)。 私はそれをすべてスプリントレイアウトで描き始めましたが、この友人はプロテウスに助言しました。それは非常に実用的なアドバイスでした。 プロテウスは、回路を設計するための素晴らしい便利なシステムですので、この困難な作業を行う人にはお勧めです。
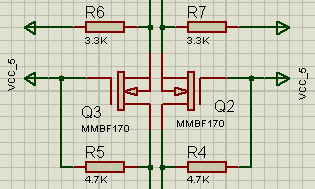
次に、すべてのデバイスで図を作成します。
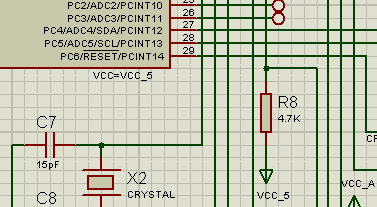
スクリーンショットを公開する準備をしていたときに回路全体をキャプチャしなかった理由を覚えていませんが、フレームには、電源用に5 V、3.3 V、個別にフィルター処理された3.3 Vの個別の電源を提供するコネクタと電源ユニットのみが含まれていませんでしたセンサー。
ボードレイアウトモードに切り替え、ここで最も創造的なプロセスが始まります。


完全性と曲率の間に妥協点が見つかった場合、結果のボードの3D視覚化をオンにしてリラックスできます。
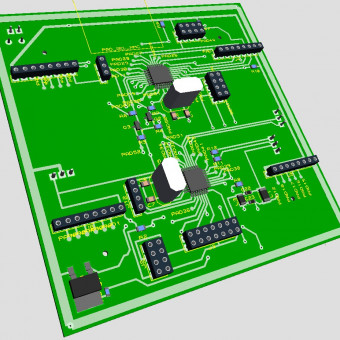
ボード全体の幅は約15センチ、長さは同じでした。 同様に、周辺機器用のドッキングボードを描画します(これらのドッキングボードは、「マザーボード」のコネクタに簡単に挿入できます)。
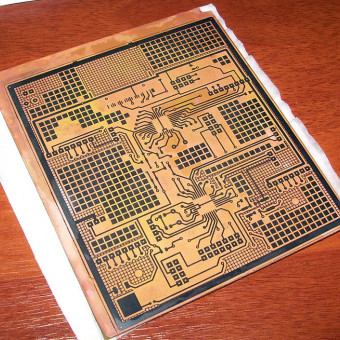
ボード作成
LJユーザーalex_avr2 によって美しく説明されている、わずかに異なるテクノロジーを使用してそれらを作成しました。 その本質は、トラックのパターンをホイルに直接印刷し(ホイルの紙をプリンターに入れるのはかなり怖い)、そして鉄でそれを押した後、ボードがホイルでエッチングされることです。 基材を剥がす必要がないため、パターンは鮮明で美しいです。 電子機器を使用することを決定した人にとってのもう1つのヒントは、この方法の品質がはるかに高く、不良率が低く、生産が容易になることです。
GPS用のドックを作成します。

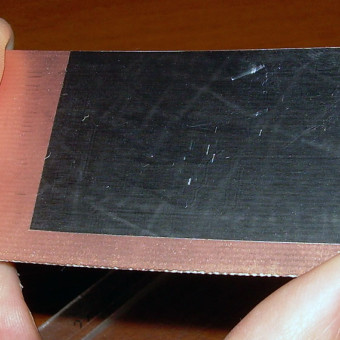
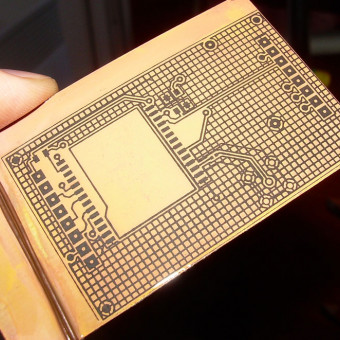
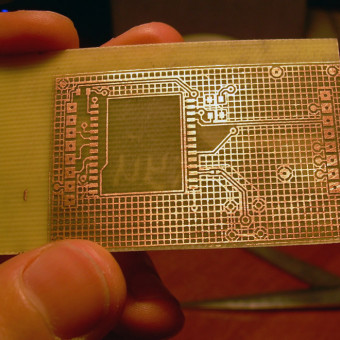
そしてメインボード:

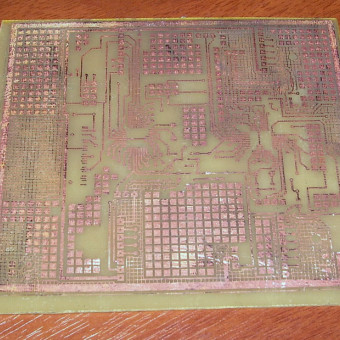
(2番目の写真は、ホイルを鉄で押した後、トラックのレリーフがどのように表示されるかを示しています。最後に、見た目ほど悪くなく、ちょうどそのように研削しています)
次に、穴を開けてメタライズして、ボードの2つの層の間に接点を作成する必要があります。 自宅では、「正直な」金属化を達成することは非常に困難です(金属が穴の壁に落ち着く場合)。そのため、銅線を穴に挿入し、両側でシールします。 しかし、ワイヤーのリベットでこの方法の小さなバリエーションを試してみることにしました(この方法では、突き出しが少なくなり、はんだ付けが容易になります)。 今回口ひげに巻き付けた2つのこと:自家製のミニドリルで多くの穴を開けるのは非常に難しいことです。ワイヤーをリベットで留める場合は、より多くの接触円を作成する必要があります。
さらに、便利なワイヤフィードのために、スタイラスの代わりに自動鉛筆に押し込むことができ、 シンプルなデバイスがボードに厳密に垂直に穴を開けるのに役立ちます。 ただし、ボードの層が正確に整列されていない場合、垂直ドリルは役に立たないので、私のような手でフォトレジストを使用することをお勧めします。
ラマ、最初の試み
エンターテイメントのために、フレームを作成しない方法を説明します。 断面が5x5 mmの薄っぺらなPCBやカーボンファイバーのプロファイルで作られている必要はありません。300グラムを超えるクアドロコプターに耐えることはできません。 さて、あなたが絶対に美しさ、強度、軽量を望むなら、たった一つの選択肢があります:エポキシ樹脂(「カーボン」)を含浸させた数層のカーボンファイバー。

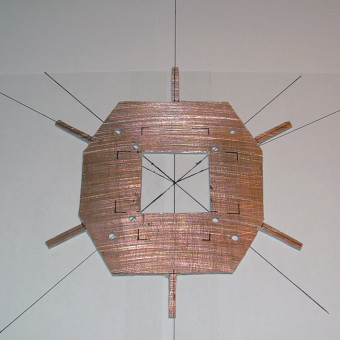
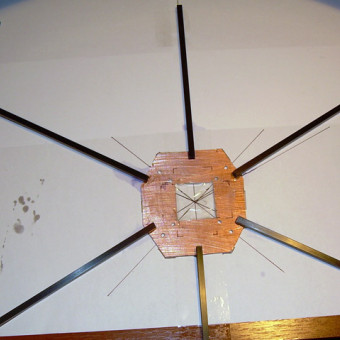




最後の写真では、エピックの失敗の概念を特徴付けるものに気付くことができます。プロペラの端が互いに接触しています。 理由はわかりませんが、上から(そして下からも)初めて成功しませんでした。 間違った側に何かをねじ込むことが可能であった場合、私は間違いなくそれをしましたが、私は何度もそれをチェックしました。 悲しいです
書きたくなかったセクション
良いニュースと悪いニュースがあります。 悪いことは、すべての「創造性」がそこで終わるということです。 私たちは、このプロジェクトがすでに1,000ドル以上と約1年の時間を費やしており、結果を控えめに言っても、すぐそこにあることに気付きました。 多かれ少なかれゼロからソフトウェアを作成するには、少なくともさらに6か月の時間が必要であり、デバッグにはさらに多くの時間が必要です。 そして、私の曲率と限られた財政を考慮に入れて、私たちは自信を持ってそれが離陸しないと言うことができます。
もちろん悲しいことですが、このプロジェクトは撤回しませんでした。 誰かが私たちよりもうまくやってくれると信じたいです。そして、大量の資料を勉強した後、私の頭やハードディスクに蓄積されたアドバイスや情報で、そのような人々を喜んで助けます。
しかし、良いニュースがあります:次の部分では、最終的に練習に移りますが、このシャイタンマシンを組み立てます(ただし、ミスファイアがないわけではありません)。 このトピックへの関心と、以前の(そしておそらくこの)部分に関する有益なコメントをありがとう。
おわりに
電子機器の開発は非常に興味深く、魅力的な活動です。 しかし、この問題に関する経験と、刺激的で精力的な同僚のチームがなければ、最終結果は経験に過ぎません。 まあ、そしておそらく退屈な論文。
あなたの強みを過大評価せず、より多くの人々(ただし、2つのウォレットのように2つのヘッドが1つよりも優れています)、できれば関連する分野の専門家を募集してください。
継続する。