हम जो चाहते थे
हमारे पास नवाचार के संकाय और उच्च तकनीक एमआईपीटी इस प्रकार के शांत पाठ्यक्रम हैं - एक अभिनव कार्यशाला। संक्षेप में - तृतीय-वर्ष के छात्रों से, टीमों की भर्ती की जाती है जो कुछ वास्तविक करने की कोशिश कर रहे हैं, अधिमानतः प्रोग्रामिंग और आधुनिक तकनीकों के साथ किसी भी तरह से जुड़ा हुआ है। यही हम हासिल करना चाहते थे। हमारी परियोजना एक हवाई जहाज बनाने की है (हाँ, आजकल फैशनेबल quadrocopters!), जो स्वचालित मोड में / भूमि को उतारने, जीपीएस बिंदुओं के साथ उड़ान भरने और सब कुछ शूट करने में सक्षम होगा जो इसे अंतर्निहित कैमरे पर देखता है। एफपीवी हम भी चाहते थे, लेकिन बाद में।
टिप्पणी
यह पद अधिक संभावना नहीं है कि वैज्ञानिक और तकनीकी नहीं है, लेकिन शांत कहानी की श्रेणी से, जिसमें कई विफलताएं थीं, लेकिन कुछ प्रकार की सफलता भी थी। इसलिए हर कोई जो हंसना चाहता है और यह पता करता है कि हमने क्या किया है, मैं हबर-कैट के लिए पूछता हूं।

हम कौन हैं?
हमारी टीम में पाँच तीसरे वर्ष के छात्र शामिल थे, और एक चिड़ियाघर की तरह था:
दो प्लस, एक असली आईओएस डेवलपर, एक गणितज्ञ और एक लड़की जो हमें साथ रखने के लिए बाध्य है और हमें कुछ करने के लिए मजबूर करती है।
साथ ही, एबीबीवाई के तीन लोगों ने हमारे साथ काम किया, क्योंकि हमारा प्रोजेक्ट इसी कंपनी का था।
हम पहले कैसे यह सब करना चाहते थे
योजना सरल थी - हमने शौक के लिए सरलतम आरटीएफ (उड़ान भरने के लिए तैयार) विमान खरीदा, उसमें से एक रेडियो निकाला, वहां एक आर्डिनो लगाया, या हो सकता है कि टूटे हुए स्मार्टफोन से वर्कस्टेशन पर एक बोर्ड लगा हो, फर्मवेयर को वहां रखें (वर्कस्टेशन के मामले में - आरओएस - रोबोट ऑपरेटिंग प्रणाली, Arduinka - ardupilot से कुछ, megapirat, बहु- wii या इस सब के कुछ कांटा)। उसके बाद, हमें वह मिल जाता है जो हम चाहते थे, शांति से पाठ्यक्रम को बंद करें, और फिर हम पूरी चीज को सुधारना जारी रखें - हम कैमरा जिम्बल को तेज करते हैं, इस गिम्बल का प्रबंधन करते हैं, कुछ और चिप्स के साथ आने और उन्हें जोड़ने की कोशिश करते हैं। इसका क्या हुआ? एह ... खैर, कम से कम कुछ तो।
घटकों की खरीद
प्रारंभ में, हमने काफी लोकप्रिय दूसरे Bixler की दो प्रतियों का आदेश दिया - hobbyking.com/hobbyking/store/__32541__Hobbyking_Bixler_2_EPO_1500_KIT_.html ,
इन दिमागों को चुना गया - www.hobbyking.com/hobbyking/store/__26588__MultiWii_PRO_Flight_Controller_w_MTK_GPS_Module.html
यह सब आदेश देने के बाद, हम बहादुर रूसी पोस्ट की प्रतीक्षा करने लगे।
तब मैं तुरंत HC के बारे में एक समीक्षा छोड़ दूंगा - चीनियों ने न केवल तीन दिनों के लिए खरीदारी की, उन्होंने एक ट्रैकिंग नंबर भी नहीं दिया, और यह उनके काम नहीं आया। नतीजतन, हमने मार्च के मध्य में पार्सल का आदेश दिया, इसे 9 मई को विजय दिवस पर प्राप्त किया ... सेमेस्टर पहले ही खत्म हो गया था।
अप्रैल के अंत में, हमने महसूस किया कि पौराणिक आधार पर घसीटना और इंतजार करना असंभव था, और हमें कुछ करना था।
रूस में, विमान खरीदा गया था, सबसे मजबूत (पहली उड़ानों के लिए), जो हमारे बोर्ड को खींच सकता था और भविष्य में, कैमरा।
यहाँ विमान की एक तस्वीर है:

सॉफ्टवेयर
लंबे समय से विवादों और कुछ समझदारी को इकट्ठा करने के प्रयासों के बाद, हम अर्दुपिलॉट पर बस गए, जो बॉक्स के बाहर बहुत सारी शांत चीजें करने में सक्षम होने के अलावा, एक बहुत ही शांत चीज भी है - एपीएम मिशन प्लानर, जो आपको एक सुविधाजनक बोर्ड से सीधे मिशन बिछाने की अनुमति देता है गुआया (जिसे हम उपयोगकर्ताओं को पसंद करते थे) + आपके टैबलेट / फोन का उपयोग करके मिशन सेट करने की क्षमता भी है, आपको केवल अपनी स्थिति को ट्रैक करने और लक्ष्यों को बदलने के लिए प्लेन पर टेलीमेट्री किट और मिशन को सेट करने के लिए USB OTG सपोर्ट की आवश्यकता है।
पहले निर्माण
इसी लाल विमान को इकट्ठा करने के बाद, हमने PIDs को बहुत लंबे समय तक और जिद्दी बना दिया, क्योंकि यह बहुत लोकप्रिय नहीं है, यह अधिक कारीगर उत्पादन की तरह दिखता था, और हमें इसके लिए सामान्य तैयार किए गए कॉन्फ़िगरेशन नहीं मिले। कुल मिलाकर, फर्मवेयर में 321 मापदंडों की आवश्यकता होती है, जो निर्धारित करते हैं कि फर्मवेयर हार्डवेयर को कैसे नियंत्रित करेगा। इससे अच्छा कुछ नहीं हुआ, हम स्वचालित मोड में नहीं जा पाए।
नया विमान
फिर 9 मई आया, और हम भाग्यशाली थे - हमारे विमान पहुंचे। सच पूरी तरह से विघटित स्थिति में आया, इसलिए हमने शाम को उनकी पूरी सभा में बिताया।
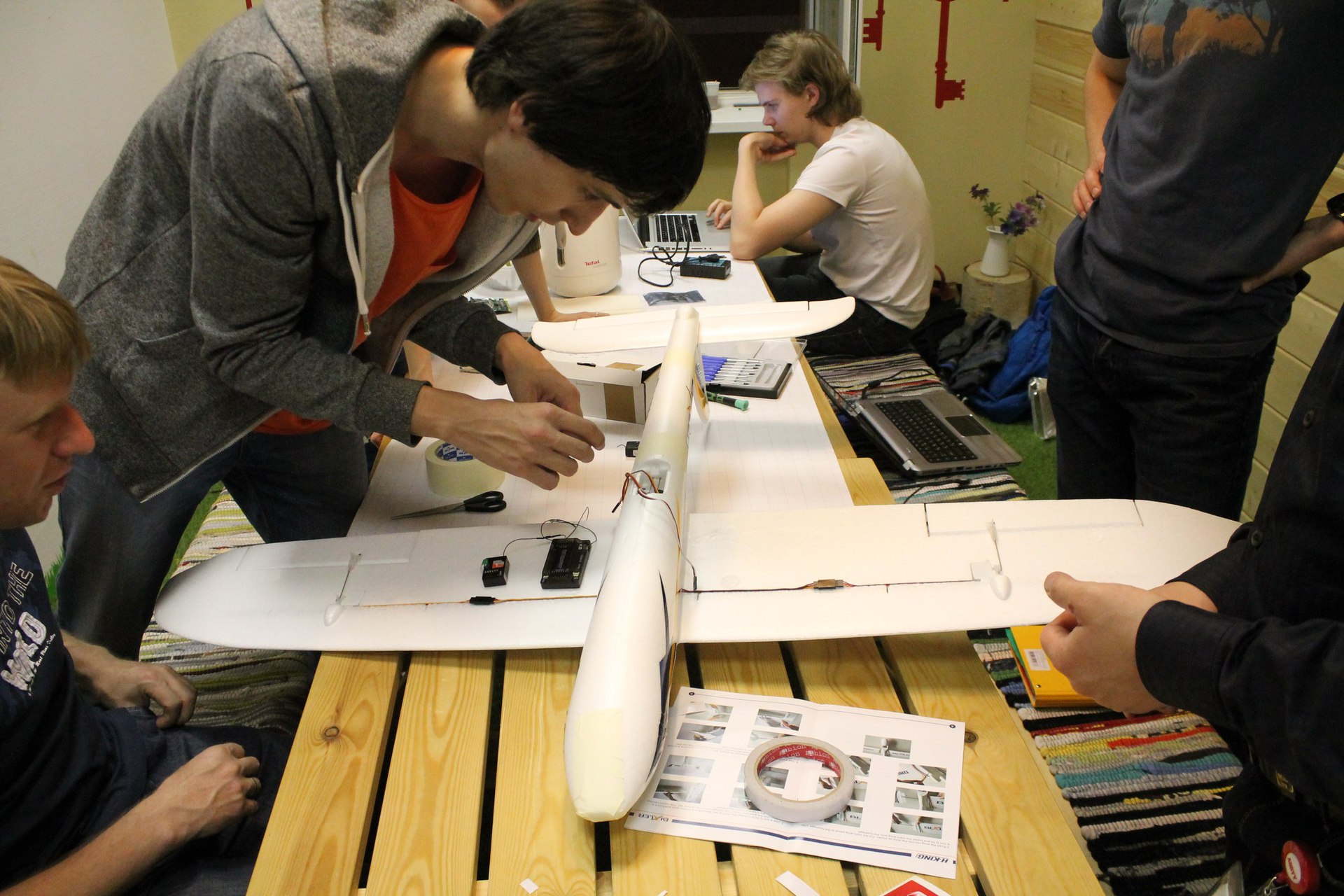


पहली उड़ान
विमान को इकट्ठा करने के बाद, हम उड़ान भरने गए। पहले, ज़ाहिर है, कुछ भी नहीं हुआ - विमान स्वचालित रूप से एक मिशन पर नहीं जाना चाहता था, हाथ से शुरू करने के बाद इंजन को चालू नहीं किया। उसके बाद, हमने कॉन्फ़िगर और सेटिंग्स के माध्यम से अफवाह उड़ाई - यह पता चला कि जब बिजली चालू होती है, तो बोर्ड ऑपरेशन के गलत मोड पर डिफ़ॉल्ट रूप से बदल जाता है - यह पीसी से कनेक्शन की प्रतीक्षा कर रहा था, और मिशन शुरू करने की कोशिश नहीं कर रहा था।
उसके बाद हमारी उड़ानों का सबसे मजेदार और दुखद क्षण था। देर शाम, अगले लॉन्च के बाद, विमान ने उड़ान भरी। एक तरफ हवा चली, उसने स्थिर करने की कोशिश की, और ... लुढ़का हुआ था ... हम एयोलॉन के लिए जिम्मेदार सर्वो की ध्रुवीयता को उलट देते हैं ... हालांकि, उड़ान वहाँ समाप्त नहीं हुई - लगभग 20 मीटर के बाद विमान अपने लैंडिंग पेट तक पहुँच गया, और हाँ, यह उतरना शुरू कर दिया। यह देखते हुए कि हमने लिफ्ट की ध्रुवीयता को भ्रमित नहीं किया है, विमान लंबवत ऊपर की ओर गया और पेड़ की शाखाओं को पकड़ लिया।
उस दिन की फोटो रिपोर्ट -



जैसा कि आप देख सकते हैं, हमने विमान के नाक और पंखों को बिजली के टेप और बढ़ते टेप के साथ मजबूत किया है - और अच्छे कारण के लिए। सभी दुर्घटनाओं और दुर्घटनाओं के बाद, विमान स्थिर रहा और उड़ान भरी, और अगले प्रक्षेपण के लिए इसे तैयार करने में लगभग 5-10 मिनट का समय लगा।
हालांकि, उड़ानों का पहला दिन कुछ भी नहीं था - यह अंधेरा हो गया, लेकिन हमने कभी उड़ान भरना नहीं सीखा।
दूसरी उड़ान का दिन हमारे लिए कुछ भी उपयोगी नहीं था - लगभग 2 घंटे तक उड़ान भरने की कोशिश करते हुए, हमारा विमान एक उच्च बर्च पर लटका हुआ था, और बहादुर स्थानीय तीरंदाजों - टोलकेनिस्टों ने इसे वहां से हटा लिया। पूरी रात मरम्मत हुई।
सफलता
हमारी परियोजना की प्रस्तुति से पहले, केवल 2.5 घंटे शेष थे, सुबह 6 बजे घड़ी थी, और हम उड़ान भरने की कोशिश करने गए।
पहली उड़ान लगभग अंतिम बन गई:

हमने पहले से ही सोचा था कि यह फोटो हमारे प्रोजेक्ट की प्रस्तुति में एकमात्र स्लाइड होगी।
यह पता चला कि लॉन्च के दौरान, जेपीआई ने प्रस्थान किया - बोर्ड पर एक जम्पर जो यह निर्धारित करता है कि बोर्ड विमान के ईएससी से या यूएसबी से बिजली लेता है।
असफल वीडियो:
हालाँकि, हमने इसे ठीक कर दिया, और आंशिक, लेकिन सफलता, हमारी प्रतीक्षा की।
जैसा कि आप देख सकते हैं, हाथ से शुरू करने के बाद, स्वचालित मोड चालू हो गया था, विमान ने उड़ान भरी (क्योंकि नियंत्रण बोर्ड को पारित किया गया), नीचे गोता लगाया, फिर निश्चित रूप से, लैंडिंग क्षेत्र पर पहुंच गया और अधिक या कम कोमलता से बैठ गया। दुर्भाग्य से, ऑपरेटर भाग्यशाली नहीं था, और हमने इसे कुटिलता से गोली मार दी। हालांकि, आप स्पष्ट रूप से देख सकते हैं कि विमान कैसे बढ़ रहा है और स्थिर हो रहा है।
उसके बाद, हम अब फिर से उड़ान भरने में सक्षम नहीं थे - जेपीआई जम्पर ने नोजल पर रखा और लगातार उड़ान भरी, और समय समाप्त हो रहा था।
निकट भविष्य में, एक कैमरा संलग्न करने और बड़े क्षेत्रों में उड़ान भरने की योजना है, लेकिन यह भविष्य के पोस्ट के लिए एक विषय है।
अगर किसी को किसी चीज में दिलचस्पी है, तो वह पीएम / टिप्पणियों / किसी अन्य पोस्ट में जवाब देने के लिए तैयार है।
ps और यहाँ बताया गया है कि हम एक पेड़ पर कैसे समाप्त हुए: