Atmega16 माइक्रोकंट्रोलर, या पास्कल AVR प्रोग्रामिंग पर एलईडी दिल
एक बार मैंने अपनी प्यारी प्रेमिका के लिए एक वर्तमान बनाने का फैसला किया। ऐसा करने के लिए, मैंने खुद को सोल्डरिंग आयरन, प्रोग्रामर और कंप्यूटर से लैस किया। और, एक कलाकार के रूप में, उन्होंने एक एलईडी दिल बनाया। अपने दिल को विशेष बनाने के लिए, मैंने सभी प्रकार के एलईडी ब्लिंकिंग मोड को लागू करने का प्रयास किया।
योजना
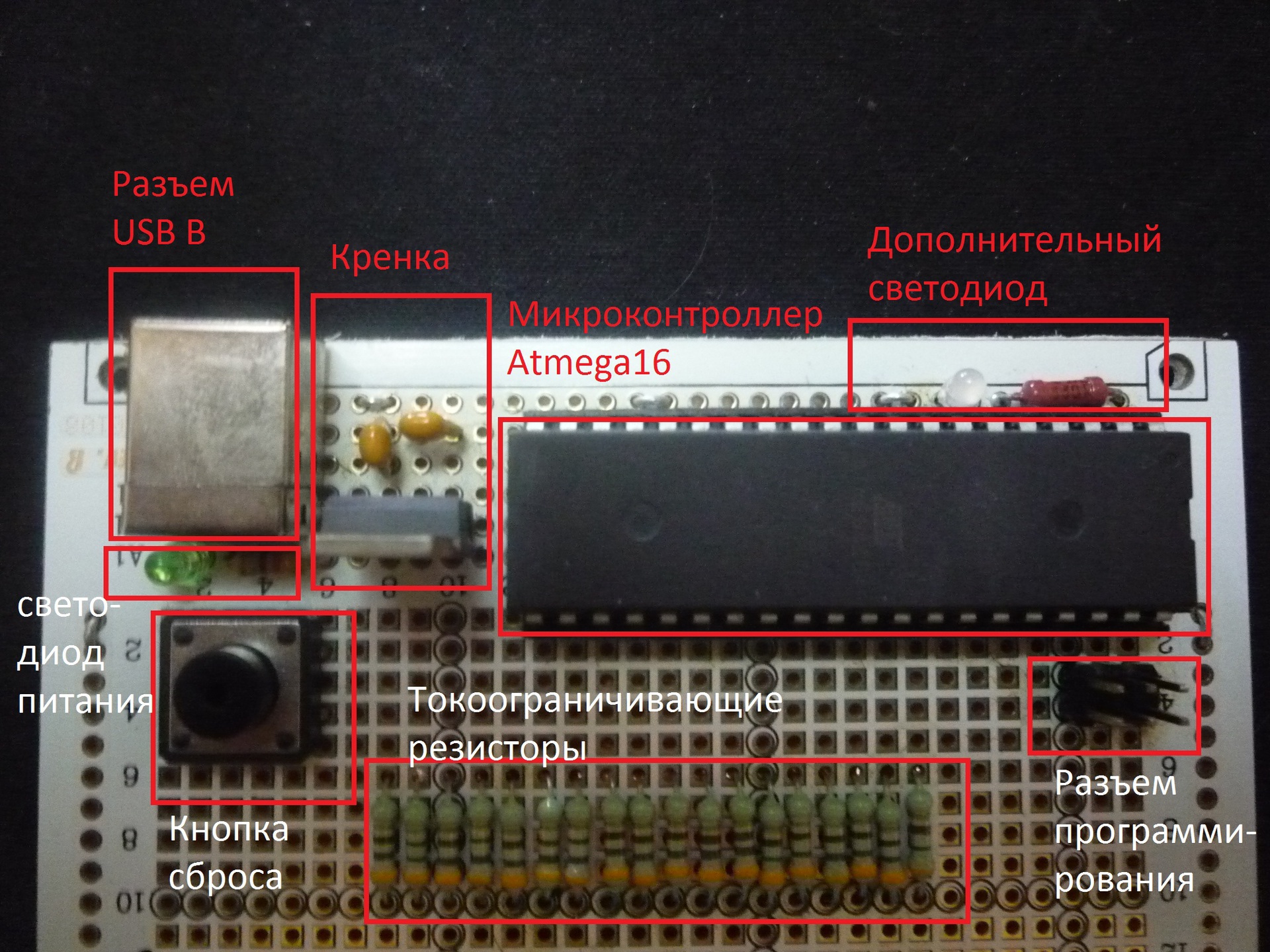
सर्किट कैसा होता है? यहां कुछ भी असामान्य नहीं है। दिल का नियंत्रण कोर, "पेसमेकर" का एक प्रकार है, जो न्यूनतम आवश्यक दोहन से घिरा हुआ प्रसिद्ध माइक्रोकंट्रोलर AVR Atmega16 है । मैंने क्वार्ट्ज से क्लॉकिंग शुरू नहीं की, माइक्रोकंट्रोलर 1 मेगाहर्ट्ज की आवृत्ति पर आंतरिक आरसी सर्किट पर चलता है।
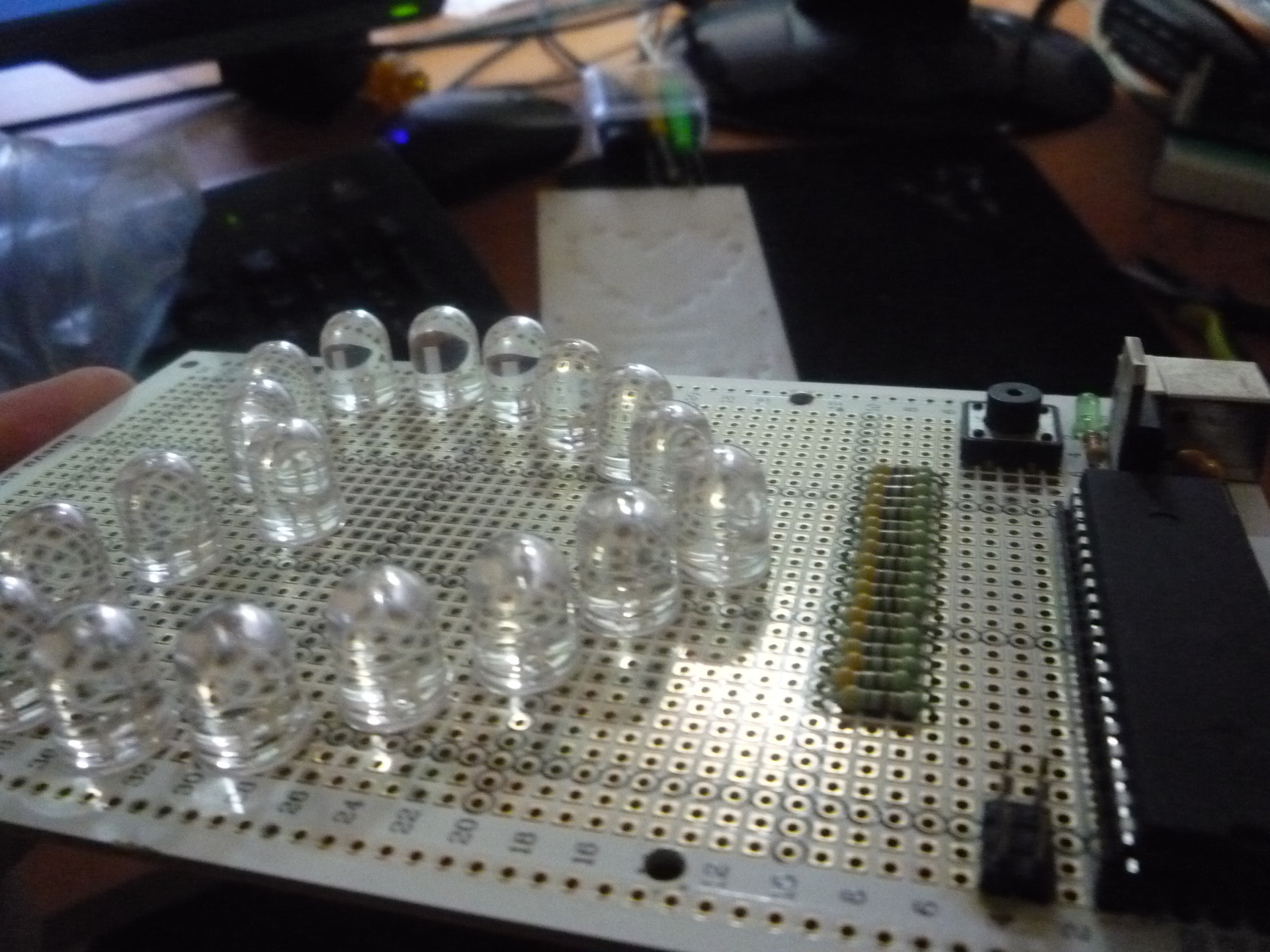
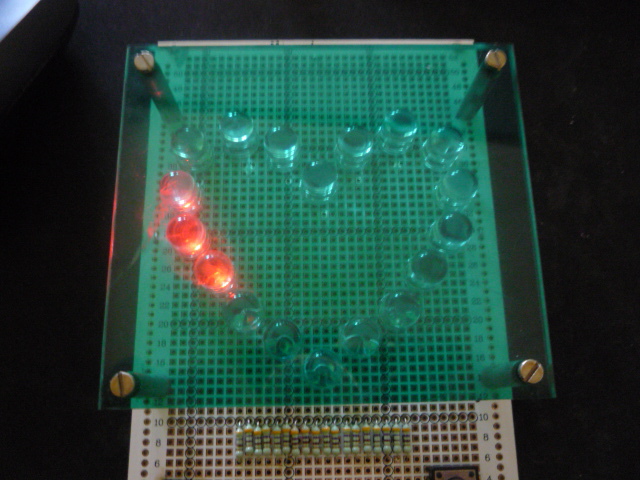
प्रत्येक एलईडी जो हृदय का निर्माण करता है, 500 ओएचएम वर्तमान-सीमित प्रतिरोध के माध्यम से माइक्रोकंट्रोलर के एक अलग "पैर" से जुड़ा हुआ है। पोर्ट अ (सभी पिन), सी (सभी पिन), डी (दो पिन) से जुड़े कुल अठारह एलईडी। एल ई डी को "यूनिट" द्वारा नियंत्रित किया जाता है।
बढ़ते
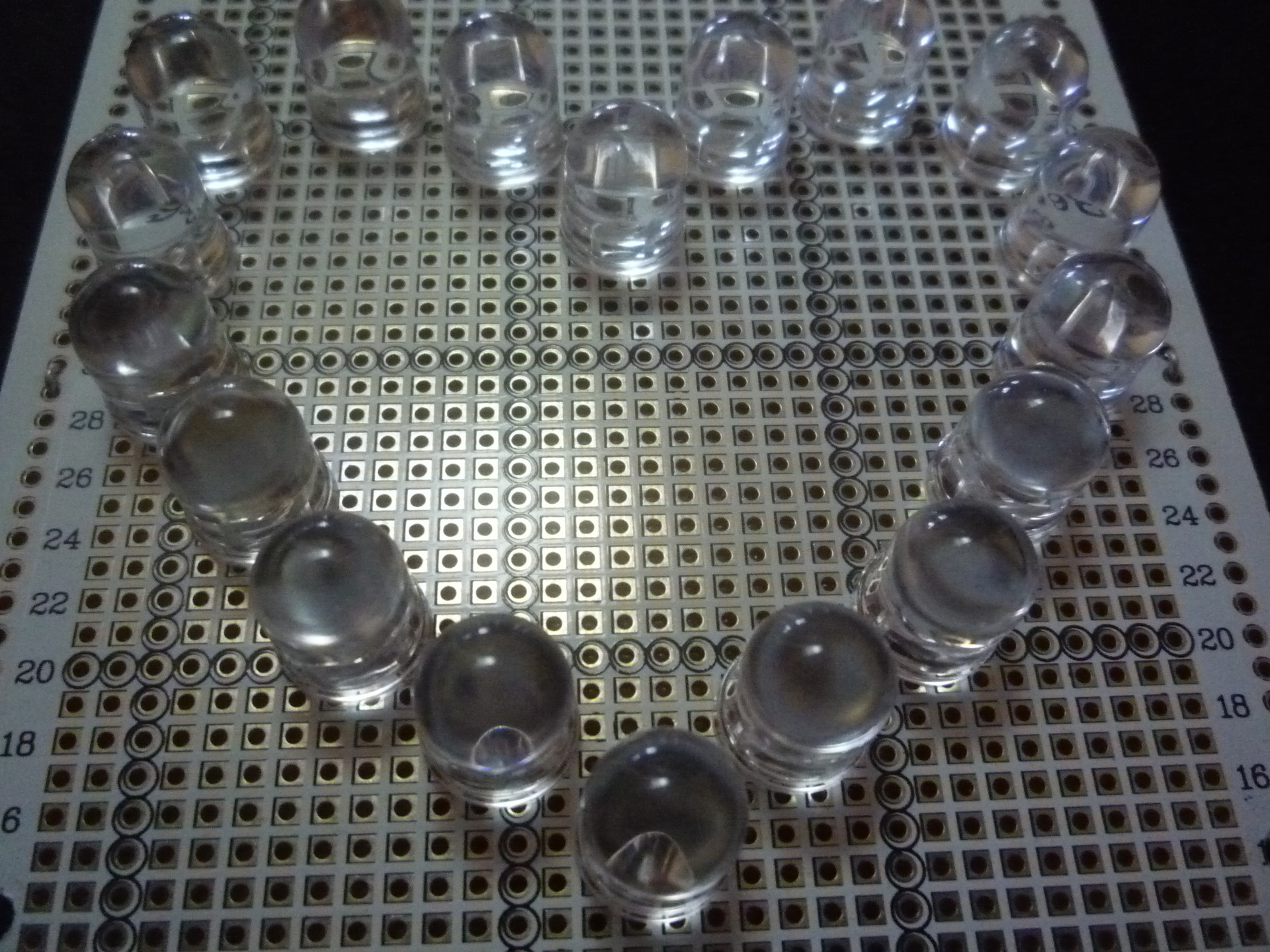
सभी तत्वों को एक ब्रेडबोर्ड पर MGTF तार द्वारा मिलाया गया था।
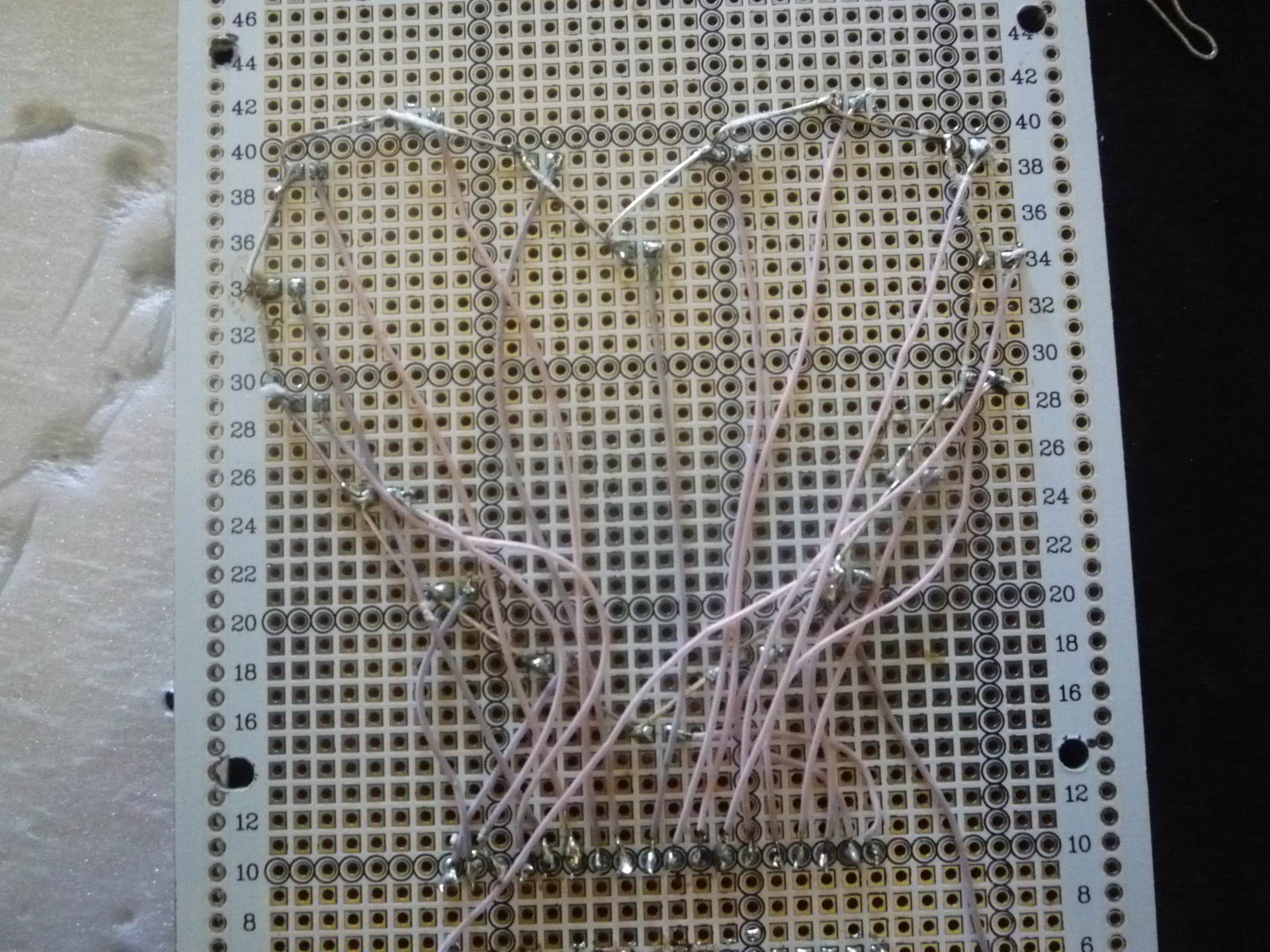
बैक बोर्ड स्थापना को बचाने के लिए पतले फोम के साथ "वायर्ड" था। इसके अलावा, "पैर" शिकंजा के साथ खराब किए गए रैक से बने थे।
क्योंकि एल ई डी बहुत उज्ज्वल निकला, मुझे हरे Plexiglas से एक मफलिंग सुरक्षात्मक स्क्रीन बनाना पड़ा और इसे रैक तक बढ़ा दिया। क्यों पूर्व-ड्रिल किए गए छेद।
कार्यक्रम
एटमेगा 16 माइक्रोकंट्रोलर को प्रोग्राम करने के लिए, मैंने ई-लैब विकास पर्यावरण का उपयोग करने का निर्णय लिया। ई-लैब क्यों? शायद इसका जवाब यह है कि उस समय Arduino प्लेटफॉर्म अभी तक पैदा नहीं हुआ था। और इस तरह की परियोजना के कार्यान्वयन के लिए अपेक्षाकृत सरल और सुविधाजनक उपकरण की आवश्यकता थी। E-LAB एक तरह का "दादा" Arduino IDE है। ई-लैब उच्च स्तरीय प्रोग्रामिंग भाषा पास्कल में एवीआर माइक्रोकंट्रोलर्स के लिए कार्यक्रमों का निर्माण प्रदान करता है, जिसे हर कोई जानता है। हालांकि पास्कल एक उच्च-स्तरीय भाषा है, लेकिन एवीआर माइक्रोकंट्रोलर्स की वास्तुकला का ज्ञान और उनके कामकाज के सामान्य सिद्धांत इस भाषा के सफल उपयोग के लिए आवश्यक हैं। E-LAB, माइक्रोकंट्रोलर (टाइमर, PWM, I2C, UART, आदि) में निर्मित परिधीय मॉड्यूल के साथ काम करने के लिए पुस्तकालयों का एक भंडार है, साथ ही साथ विभिन्न बाह्य परिधीय उपकरणों (कीबोर्ड, साइन-सिंथेसिस एलसीडी, "सात-खंड", ईथरनेट आदि) .D।)।
कार्यक्रम का मुख्य तर्क कार्यक्रम टाइमर के व्यवधान में एलईडी डिस्प्ले मोड को क्रमिक रूप से स्विच करना है। जब मैंने इस कार्यक्रम को लिखा था, तो मैंने संस्करण नियंत्रण प्रणालियों का उपयोग नहीं किया था, इसलिए कार्यक्रम का नवीनतम संस्करण संरक्षित नहीं था। लेकिन मुझे प्रोग्राम का एक मध्यवर्ती संस्करण मिला जिसमें मुख्य ऑपरेटिंग मोड, विशेष रूप से सॉफ्टवेयर 18-चैनल पीडब्लूएम, मौजूद हैं।
पास्कल कार्यक्रम पाठ
program Love_Machine; {$NOSHADOW} { $WG} {global Warnings off} // ATmega16 // 3.3 Device = mega16, VCC=3.3; { $BOOTRST $01C00} {Reset Jump to $01C00} Import SysTick, TickTimer; From System Import LongWord; Define // 1 M ( RC-) ProcClock = 1000000; {Hertz} SysTick = 10; {msec} StackSize = $0032, iData; FrameSize = $0032, iData; TickTimer = Timer1; // // Define_USR SysLED_Delay = 500; Implementation {$IDATA} {--------------------------------------------------------------} { Type Declarations } type {--------------------------------------------------------------} { Const Declarations } const TimeCount: Byte = 70; MOutBits_L1:array[0..7] of Byte = ( $00, $00, $00, $00, $00, $00, $00, $ff ); MOutBits_L2:array[0..7] of Byte = ( $00, $00, $00, $00, $00, $00, $ff, $ff ); MOutBits_L3:array[0..7] of Byte = ( $00, $00, $00, $00, $00, $ff, $ff, $ff ); MOutBits_L4:array[0..7] of Byte = ( $00, $00, $00, $00, $ff, $ff, $ff, $ff ); MOutBits_L5:array[0..7] of Byte = ( $00, $00, $00, $ff, $ff, $ff, $ff, $ff ); MOutBits_L6:array[0..7] of Byte = ( $00, $00, $ff, $ff, $ff, $ff, $ff, $ff ); MOutBits_L7:array[0..7] of Byte = ( $00, $ff, $ff, $ff, $ff, $ff, $ff, $ff ); {* MOutBits: array[0..24] of LongWord =( %010000000000000101, %010000000000000101, %010000000000000101, %010000000000000101, %010000000000000101, %010000000000000001, %010000000000000001, %010000000000000001, %010000000000000001, %010000000000000001, %010000000000000001, %010000000000000001, %010000000000000001, %010000000000000001, %010000000000000001, %000000000000000101, %000000000000000101, %000000000000000101, %000000000000000101, %000000000000000101, %000000000000000001, %000000000000000001, %000000000000000001, %000000000000000001, %000000000000000001 ); *} {--------------------------------------------------------------} { Var Declarations } {$IDATA} var OutBitsIndex: Byte; St_Level: Byte; St_Timer: Byte; PortDataA: Byte; PortDataC: Byte; PortDataD: Byte; ShiftCounter: Byte; TimerTickCounter: LongWord; {--------------------------------------------------------------} { functions } // // - procedure InitPorts; begin // ( 8 ) // DDRA:= %11111111; // PortA:= %00000000; // // DDRC:= %11111111; // PortC:= %00000000; // () // DDRD:= %00000011; // PortD:= %00000000; // (2 ) // DDRB:= %00000011; end InitPorts; // procedure SysLED_Red; begin // 1- // B incl(PortB,1); // 0- // B excl(PortB,0); end SysLED_Red; // procedure SysLED_Green; begin // 0- // B incl(PortB,0); // 1- // B excl(PortB,1); end SysLED_Green; // //- procedure SysLED_SwColor; begin // SysLED_Red; // mDelay(Word(SysLED_Delay)); // SysLED_Green; // mDelay(Word(SysLED_Delay)); end SysLED_SwColor; // procedure onTickTimer; //(SaveAllRegs); begin //SysLED_SwColor; case St_Timer of 0: toggle(PortA,0); toggle(PortA,1); toggle(PortA,2); toggle(PortA,3); toggle(PortA,4); toggle(PortA,5); toggle(PortA,6); toggle(PortA,7); toggle(PortC,0); toggle(PortC,1); toggle(PortC,2); toggle(PortC,3); toggle(PortC,4); toggle(PortC,5); toggle(PortC,6); toggle(PortC,7); toggle(PortD,0); toggle(PortD,1); | 1: PortDataA := PortDataA ror 1; PortA := PortDataA; PortDataC := PortDataC ror 1; PortC := PortDataC; PortDataD := PortDataD ror 1; PortD := PortDataD; | 2: // PortDataC := PortDataC ror 1; // PortC := PortDataC; // PortDataD := PortDataD ror 1; // PortD := PortDataD; if (ShiftCounter = 0) or (ShiftCounter = 18) then PortD := $00; ShiftCounter := 0; PortDataA := $01; PortA := PortDataA; inc(ShiftCounter); elsif (ShiftCounter < 8) and (ShiftCounter > 0) then PortDataA := PortDataA rol 1; PortA := PortDataA; inc(ShiftCounter); elsif (ShiftCounter = 8) then PortA := $00; PortDataC := $01; PortC := PortDataC; inc(ShiftCounter); elsif (ShiftCounter > 8) and (ShiftCounter < 16) then PortDataC := PortDataC rol 1; PortC := PortDataC; inc(ShiftCounter); elsif (ShiftCounter = 16) then PortC := $00; PortDataD := $01; PortD := PortDataD; inc(ShiftCounter); elsif (ShiftCounter > 16) and (ShiftCounter < 18) then PortDataD := PortDataD rol 1; PortD := PortDataD; inc(ShiftCounter); endif; | 3: inc(TimerTickCounter); if ( ( TimerTickCounter mod TimeCount ) = 0 ) then inc(St_Level); if ( St_Level >= 16) then St_Level := 1; endif; endif; case St_Level of 0: PortA := $00; PortC := $00; PortD := $00; | 1: PortA := MOutBits_L1[OutBitsIndex]; PortC := MOutBits_L1[OutBitsIndex]; PortD := MOutBits_L1[OutBitsIndex]; | 2: PortA := MOutBits_L2[OutBitsIndex]; PortC := MOutBits_L2[OutBitsIndex]; PortD := MOutBits_L2[OutBitsIndex]; | 3: PortA := MOutBits_L3[OutBitsIndex]; PortC := MOutBits_L3[OutBitsIndex]; PortD := MOutBits_L3[OutBitsIndex]; | 4: PortA := MOutBits_L4[OutBitsIndex]; PortC := MOutBits_L4[OutBitsIndex]; PortD := MOutBits_L4[OutBitsIndex]; | 5: PortA := MOutBits_L5[OutBitsIndex]; PortC := MOutBits_L5[OutBitsIndex]; PortD := MOutBits_L5[OutBitsIndex]; | 6: PortA := MOutBits_L6[OutBitsIndex]; PortC := MOutBits_L6[OutBitsIndex]; PortD := MOutBits_L6[OutBitsIndex]; | 7: PortA := MOutBits_L7[OutBitsIndex]; PortC := MOutBits_L7[OutBitsIndex]; PortD := MOutBits_L7[OutBitsIndex]; | 8: PortA := $FF; PortC := $FF; PortD := $FF; | 9: PortA := MOutBits_L7[OutBitsIndex]; PortC := MOutBits_L7[OutBitsIndex]; PortD := MOutBits_L7[OutBitsIndex]; | 10: PortA := MOutBits_L6[OutBitsIndex]; PortC := MOutBits_L6[OutBitsIndex]; PortD := MOutBits_L6[OutBitsIndex]; | 11: PortA := MOutBits_L5[OutBitsIndex]; PortC := MOutBits_L5[OutBitsIndex]; PortD := MOutBits_L5[OutBitsIndex]; | 12: PortA := MOutBits_L4[OutBitsIndex]; PortC := MOutBits_L4[OutBitsIndex]; PortD := MOutBits_L4[OutBitsIndex]; | 13: PortA := MOutBits_L3[OutBitsIndex]; PortC := MOutBits_L3[OutBitsIndex]; PortD := MOutBits_L3[OutBitsIndex]; | 14: PortA := MOutBits_L2[OutBitsIndex]; PortC := MOutBits_L2[OutBitsIndex]; PortD := MOutBits_L2[OutBitsIndex]; | 15: PortA := MOutBits_L1[OutBitsIndex]; PortC := MOutBits_L1[OutBitsIndex]; PortD := MOutBits_L1[OutBitsIndex]; | endcase; inc( OutBitsIndex ); if OutBitsIndex >= 8 then OutBitsIndex := 0; endif; | endcase; end; {--------------------------------------------------------------} { Main Program } {$IDATA} // Reset'a begin // / InitPorts; // // = 1 // = 1 TickTimerTime(1000); // TickTimerStart; // TickTimerStop; // EnableInts; { // // c incl(PortA,0); mDelay(1000); incl(PortA,1); mDelay(1000); incl(PortA,2); mDelay(1000); incl(PortA,3); mDelay(1000); incl(PortA,4); mDelay(1000); incl(PortA,5); mDelay(1000); incl(PortA,6); mDelay(1000); incl(PortA,7); mDelay(1000); incl(PortC,0); mDelay(1000); incl(PortC,1); mDelay(1000); incl(PortC,2); mDelay(1000); incl(PortC,3); mDelay(1000); incl(PortC,4); mDelay(1000); incl(PortC,5); mDelay(1000); incl(PortC,6); mDelay(1000); incl(PortC,7); mDelay(1000); incl(PortD,0); mDelay(1000); incl(PortD,1); mDelay(1000); // (Toggle) St_Timer := 0; // 200 TickTimerTime(200000); // TickTimerStart; // 2 mDelay(2000); // 150 TickTimerTime(150000); // TickTimerStart; mDelay(2000); // TickTimerStop; // 100 TickTimerTime(100000); // TickTimerStart; // 2 mDelay(2000); // TickTimerStop; // 50 TickTimerTime(50000); // TickTimerStart; // 2 mDelay(2000); // TickTimerStop; // 25 TickTimerTime(25000); // TickTimerStart; // 2 mDelay(2000); } // TickTimerStop; PortDataA := $AA; PortDataC := $AA; PortDataD := $AA; // (Shift Inv) St_Timer := 1; // 200 TickTimerTime(200000); // TickTimerStart; // 5 mDelay(2000); // TickTimerStop; PortA := $00; PortC := $00; PortD := $00; PortDataA := $00; PortDataC := $00; PortDataD := $00; ShiftCounter := 0; // (Shift One) St_Timer := 2; // 200 TickTimerTime(200000); // TickTimerStart; // 5 mDelay(5000); // TickTimerStop; // (PWM) St_Timer := 3; // = 1 TickTimerTime(1000); // TickTimerStart; // loop //inc(St_Level); //if ( St_Level >= 9) //then // St_Level := 0; //endif; //mDelay(200); //SysLED_SwColor; // incl(PortC,1); // mDelay(1); endloop; end Love_Machine.
ई-लैब परियोजना की फाइलें यहां डाउनलोड की जा सकती हैं ।
E-LAB का एक गंभीर दोष यह था कि पर्यावरण से प्रोग्रामिंग के लिए एक विशेष मालिकाना प्रोग्रामर की आवश्यकता होती है। एक नहीं होने के लिए, मैंने अपने खुद के उत्पादन के " AVR910 " प्रोग्रामर AVR910 का उपयोग करके माइक्रोकंट्रोलर में हेक्स-फ़ाइल का पता लगाया।
निष्कर्ष
मुझे लगता है कि अब, हर कोई Arduino प्लेटफॉर्म पर एक समान उपहार बना सकता है, और इस तरह अपने प्रियजनों को खुश कर सकता है। यह एक इच्छा होगी।