1. आधुनिक नेटवर्क में एक साथ स्थिरता और प्लास्टिसिटी नहीं है, अर्थात, नेटवर्क के सही संचालन की प्रक्रिया इसके प्रशिक्षण के अनुकूल नहीं है। आधुनिक नेटवर्क में नई चीजें सीखना, वे सफलतापूर्वक पुराने को भूल जाते हैं, इसलिए तंत्रिका नेटवर्क के एक अपरिवर्तनीय कलाकारों का उपयोग प्रशिक्षण के बाद काम के लिए किया जाता है, जिसे प्रबंधित करने की आवश्यकता नहीं होती है।
2. एक कार्यशील नेटवर्क के लिए हमारी आवश्यकताओं की विशिष्टता, भले ही इसमें स्थिरता और प्लास्टिसिटी दोनों हों, यह इसे गलतियाँ करने की अनुमति नहीं देता है, और प्रशिक्षण में इससे बचना असंभव है। हम एक ऐसी प्रणाली क्यों पूछ रहे हैं जो न केवल शारीरिक रूप से विफल हो सकती है, बल्कि "मानव कारक" जैसी चीज़ के भी पास है?
मैंने अपने आप को एक फ्लैट स्पेस में अमीबा को नियंत्रित करने के लिए एक तंत्रिका नेटवर्क पर एक मॉडल बनाने का लक्ष्य निर्धारित किया, लक्ष्य की ओर मुड़ने और इसे प्राप्त करने की प्रवृत्ति। कार्य बहुत तुच्छ है, लेकिन पूरी समस्या यह थी कि अमीबा को मेरी मदद के बिना खुद यह सीखना चाहिए। आखिरकार, स्वचालित सिस्टम बनाने के बाद भी, हम उस विशिष्ट कार्य के लिए परिस्थितियों के पूरे सेट के लिए सभी समाधानों को पूर्व-निर्धारित करते हैं जो मशीनें प्रदर्शन करेंगी, और हम सिस्टम को उनके कामकाज की प्रक्रिया में सीखने की अनुमति नहीं देते हैं। सुंदर शब्दों में, इसे निम्नानुसार वर्णित किया जा सकता है: "समस्या का समाधान पहले से नियंत्रण प्रणाली में नहीं रखा गया है, हम न केवल कार्य के निष्पादन को सिस्टम में स्थानांतरित करते हैं, बल्कि इस समस्या का समाधान भी ढूंढते हैं।"
हम स्वचालित प्रणालियों में पूर्व-बिछाने समाधानों के लिए उपयोग किए जाते हैं ताकि स्व-सीखने के एक अमूर्त मॉडल की कल्पना करना मुश्किल हो और स्वतंत्र रूप से स्वचालित प्रणाली के लिए समाधान खोजना। एक ही रेक पर कदम रखने की जरूरत नहीं है, यह सोचकर कि फिनाले में हमें किसी न किसी रूप में यह बताना होगा कि समस्या को कैसे हल किया जाए। किसी दिन, एक ऑटोमेटन हमसे प्राप्त जानकारी को समझने और अन्य लोगों के अनुभव का उपयोग करने में सक्षम होगा, लेकिन वास्तव में हमें एक ऐसी प्रणाली के साथ काम करना शुरू करना होगा जिसमें अभी तक सीखने की क्षमता, पर्यावरण को समझने और इसे प्रभावित करने के अलावा कोई कौशल नहीं है। यह एक पारंपरिक स्वचालित प्रणाली से निकलता है जिसे आपको तुरंत एक पूर्व-एम्बेडेड समाधान को फेंकने की आवश्यकता होती है, और इसमें एक कंप्यूटिंग सबसिस्टम लगाया जाता है जो हमारे दिमाग की तरह कुछ को लागू करता है। इसलिए, मैं तंत्रिका नेटवर्क का उपयोग मस्तिष्क के सबसे नज़दीकी झलक के रूप में करता हूं।
लेकिन इस तरह की मशीन के साथ पहली मुलाकात के बाद आपको एहसास होगा कि वह एक पूर्ण ऑटिस्टिक है, परवाह नहीं है और उसके चारों ओर की दुनिया गहरी उदासीन है। लेकिन हम अभी भी उसे सक्षम होने की जरूरत है, इससे पहले कि हम अपने एम्बेडेड समाधान बाहर फेंक दिया। मुझे एक महत्वपूर्ण बात याद आई, हमारी समस्या को हल करने के लिए सिस्टम के सामने रखना भूल गया। इस प्रणाली को स्पष्ट किया जाना चाहिए जब इसके कार्य हमारी समस्या को हल करने के लिए शर्तों को पूरा करते हैं और इसके विपरीत। यहां केंद्रीय शब्द "समझ" शब्द है, और यह तंत्रिका नेटवर्क है जिसे हमें "समझना" चाहिए जो हम चाहते हैं। यहां कुछ भी विशेष आविष्कार करने की आवश्यकता नहीं है, बस मौजूदा एक को दोहराएं, और हां, "भावनाओं की भाषा" हमारे लिए पूर्व-निर्मित है। मैं अब केवल आम "भावनाओं की भाषा" के बारे में बात नहीं करूंगा। मैं केवल यह कह सकता हूं कि हम सभी न केवल भावनाओं को महसूस करते हैं, बल्कि उनके साथ समान रूप से प्रतिक्रिया करते हैं, हमारी शारीरिक भाषा दिखाते हैं कि हम कैसा महसूस करते हैं। हम गाजर और छड़ी विधि का उपयोग करेंगे, क्योंकि यह सबसे सरल जानवरों के साथ भी काम करता है, यह सुखद और अप्रिय (दर्द) की भावनात्मक भावनाओं की उपस्थिति का अर्थ है। हम इन भावनाओं की तुलना में भावनाओं के एक बड़े सेट के साथ संपन्न हैं, लेकिन अमीबा मॉडल और हमारे कार्य के लिए ऐसा सेट काफी पर्याप्त है। लक्ष्य के लिए रोटेशन के सेंसर को जोड़कर, लक्ष्य के लिए आंदोलन और इसके विपरीत, साथ ही साथ उन्हें भावनात्मक रंग जोड़ना, हम समस्या की व्याख्या करते हैं और हमारी समस्या को हल करने के लिए तंत्रिका नेटवर्क को प्रेरित करते हैं।
यह तंत्रिका नेटवर्क के लिए एक महत्वपूर्ण क्षण है, क्योंकि हम प्रेरणा और संचार की एक प्रणाली शुरू कर रहे हैं (कम से कम हम अमीबा के लिए "बारी" कर सकते हैं)। एक बाहरी पर्यवेक्षक द्वारा हमारे अमीबा के व्यवहार से प्रेरित व्यवहार और उसमें भावनात्मक धारणा की उपस्थिति के साथ एक मजबूत संबंध का कारण होगा।
इसके अलावा, न्यूरॉन्स, सेंसर और समग्र रूप से तंत्रिका नेटवर्क के उपकरण का वास्तविक विवरण छोटा है, लेकिन क्यों की व्याख्या की कमी के कारण मुश्किल है। पढ़ना आवश्यक नहीं है। आप निष्कर्ष पढ़ सकते हैं।
नेटवर्क डिवाइस
न्यूरॉन मॉडल का मुख्य गुण जो मैं उपयोग करता हूं।
- नेटवर्क के एक घड़ी चक्र द्वारा न्यूरॉन द्वारा परिणाम के उत्पादन में देरी हो रही है। मुख्य लाभ यह है कि आप सामान्य रूप से न्यूरॉन्स को जोड़ने की क्षमता रखते हैं, क्योंकि यह नेटवर्क लॉजिक में त्रुटियों को नहीं लाता है, पहले सभी न्यूरॉन्स के सभी मूल्यों की गणना की जाती है, और फिर उनके आउटपुट अपडेट किए जाते हैं।
- मैं "0" और "1" न्यूरॉन्स के उत्पादन में केवल दो मूल्यों का उपयोग करता हूं।
- एक न्यूरॉन का आउटपुट एक "नकारात्मक" और "पॉजिटिव" सिनाप्स का निर्माण कर सकता है, साथ ही साथ यह सिनाप्स अपने राज्य को "पॉजिटिव" से "निगेटिव" और इसके विपरीत में बदल सकता है।
- सक्रियण फ़ंक्शन की गणना सक्रिय सकारात्मक और नकारात्मक इनपुट के बीच अंतर के रूप में की जाती है। यदि अंतर सकारात्मक है, तो परिणाम "1" है, यदि नहीं, तो "0"।
- यदि सिक्योरिटी फंक्शन का परिणाम "1" है, और "नेगेटिव" तभी है, जब रिजल्ट "0" हो, और पिछला परिणाम "1" हो, तो सिंकडॉप "सकारात्मक" बनने का प्रयास करता है।
- न्यूरॉन्स कनेक्शन स्थापित करने के क्षेत्र तक सीमित हैं, इसलिए नेटवर्क टोपोलॉजी एक भूमिका निभाना शुरू कर देता है।
मेरे नेटवर्क में न्यूरॉन्स कई प्रकारों में विभाजित हैं
- सेंसर। नेटवर्क पर प्रस्तुत पारंपरिक सेंसर केवल आउटपुट करते हैं।
- प्रभावोत्पादक। मोटर न्यूरॉन्स, आउटपुट मांसपेशियों को नियंत्रित करते हैं, और नेटवर्क को केवल इनपुट द्वारा दर्शाया जाता है।
- भावनात्मक संवेदक। यह साधारण सेंसर की तरह ही है, लेकिन वे अपरिवर्तनीय कनेक्शन स्थापित करते हैं, केवल प्रकृति में सकारात्मक या नकारात्मक, सेंसर के प्रकार पर निर्भर करता है और इन कनेक्शनों की स्थिति को बदल नहीं सकता है।
- परम्परागत। मैंने उन्हें अपने पहले लेख में वर्णित किया। आपको समस्या में सोचने की ज़रूरत नहीं है, इसे "वातानुकूलित सजगता" के स्तर पर हल किया जाता है, इसलिए मैं यहाँ उपयोग नहीं करता।
नेटवर्क एक दो-आयामी स्थान है जिसमें न्यूरॉन्स की स्थिति निर्देशांक द्वारा निर्धारित की जाती है, जिम्मेदारी के सीमित दायरे के कारण, संचार केवल पास के न्यूरॉन्स के बीच स्थापित होते हैं। बहुत शुरुआत में, न्यूरॉन्स के बीच कोई संबंध नहीं हैं। पहले कनेक्शन स्थापित होने तक, यादृच्छिक रूप से सक्रिय होते हैं। कनेक्शन तेजी से स्थापित होते हैं, करीब और अधिक बार न्यूरॉन्स एक साथ सक्रिय होते हैं (हेबब का नियम)। फाइनल में, टोपोलॉजी इस तरह दिखती है।
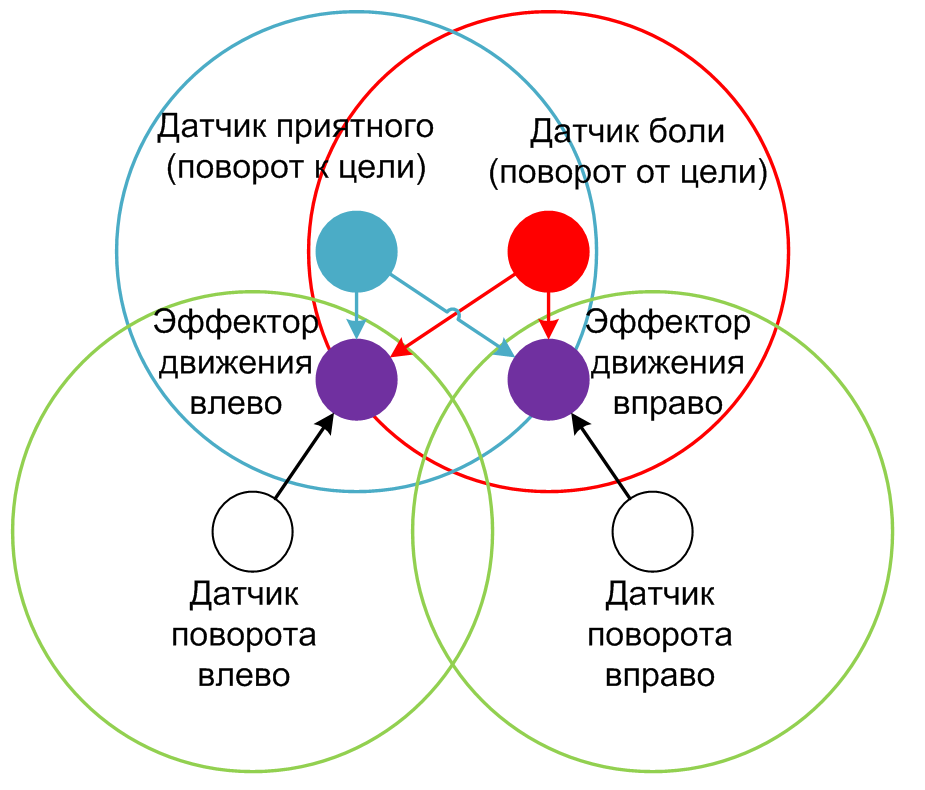
चित्रा 1. तंत्रिका नेटवर्क के खंड की टोपोलॉजी घुमावों के लिए जिम्मेदार है
मंडलियां न्यूरॉन्स की जिम्मेदारी के क्षेत्रों को इंगित करती हैं। समान टोपोलॉजी में लक्ष्य तक जाने के लिए जिम्मेदार तंत्रिका नेटवर्क का एक हिस्सा होता है। नेटवर्क के दोनों हिस्से कनेक्ट नहीं हैं।
निष्कर्ष
सामान्य न्यूरॉन्स याद नहीं थे, आपको समस्या में सोचने की ज़रूरत नहीं है, यह सशर्त रूप से उत्पन्न होने वाली रिफ्लेक्सिस के स्तर पर हल किया जाता है, इसलिए यहां मैं उनका उपयोग नहीं करता। समस्या को हल करने में केंद्रीय भूमिका नेटवर्क टोपोलॉजी द्वारा निभाई गई थी कि न्यूरॉन्स और सेंसर कैसे रखे जाते हैं। यह बहुत महत्वपूर्ण है कि आप तंत्रिका नेटवर्क कैसे तैयार करते हैं, वास्तव में, समाधान के लिए कार्य निर्धारित करें। इसके अलावा, अमीबा स्थानांतरित करने के लिए प्रयास करता है, कनेक्शन एक साथ सक्रिय न्यूरॉन्स के बीच स्थापित होते हैं, फाइनल में, दर्द की भावनाएं और सुखद इसे लक्ष्य तक पहुंचाती हैं।
अंजीर 2. अमीबा का मार्ग।
वह लक्ष्य की ओर मुड़ती और रेंगती है।
अंजीर 3. स्क्रीनशॉट।
और इसलिए यह ट्रेसिंग डिसेबल के साथ दिखता है।