Underwater drones: from the search for thermonuclear bombs to student competitions
50 years ago, the first underwater drones were affordable only for the military, and for the first time they "lit up" in order to correct an international scandal at any cost.
Then the technology migrated to the service of oil and gas magnates for building and maintaining oceanic production platforms.
The next milestone is the search for the Titanic (but in reality it was disguised underwater intelligence). But still these expeditions have brought considerable benefits for civil and scientific purposes.
To attract young people to the industry, in 1998, the Americans began to hold an international student competition, and in 2013 the Asian Open Championship started in Singapore.
The price of entry into the industry gradually declined: at first there were only military budgets, then oil corporations came, followed by universities, and finally, open source projects costing from $ 500 for "garage start-ups" appeared on the scene. And now there is even a DIY designer of underwater UAVs for schoolchildren.

Content
1. How to look for a thermonuclear bomb at the bottom of the Spanish sea
2. Ocean oil platforms
3. "Titanic" and secret underwater intelligence
4. International competitions: USA and Singapore
5. Open source projects, crowdsourcing and designer for schoolchildren.
6. Achievements of Russian student teams

Thermonuclear bomb B28RI, raised from a depth of 869 meters.
Air crash over Palomares .
Time magazine has included the incident in the list of the most serious nuclear disasters.
On January 17, 1966, an American strategic bomber B-52G with a thermonuclear weapon on board collided with a KC-135 tanker aircraft during refueling in the air. As a result of the disaster, 7 people were killed and four thermonuclear bombs were lost. Three of them landed on land and were found immediately, the fourth, which fell into the sea - only after two months of searching.
The search team included a diving expert, Captain Willard Searle, and a mathematician, Dr. John Craven, who, using the Bayesian theory of effectively finding lost objects , created a search plan.

The shells of the two B28 fusion bombs from Palomares.
For the search operations, a squadron of the US Navy was formed from 34 ships carrying more than three thousand sailors and civilian contractors. Scuba divers were used to explore the bottom at shallow depths of up to 24 meters; divers in hard suits worked at depths of up to 120 meters. Searches at great depths were performed by Alvin and Aluminaut underwater manned vehicles.

Alvin is one of the most famous operating manned underwater vehicles (PPA). The bathyscaphe is designed for three people (two scientists and a pilot) and allows for 10 hours to dive to a depth of 4500 meters.

The world's first aluminum submarine Aluminaut , 1964. On it, by the way, then drove Jacques Cousteau.
The bomb was discovered by "Alvin" at a depth of almost 800 meters. The bomb lay on the 70-degree slope of the fault, the depth of which reached 1300 meters. The first attempt to lift it, undertaken on March 26, having tied a cable to parachute lines, was unsuccessful. The bomb fell, and it was lost again. She was discovered on April 2. On April 5, a serious emergency arose when the Alvin got entangled in a parachute, the pilots of the vehicle lost sight of and could not free themselves for 15 minutes.
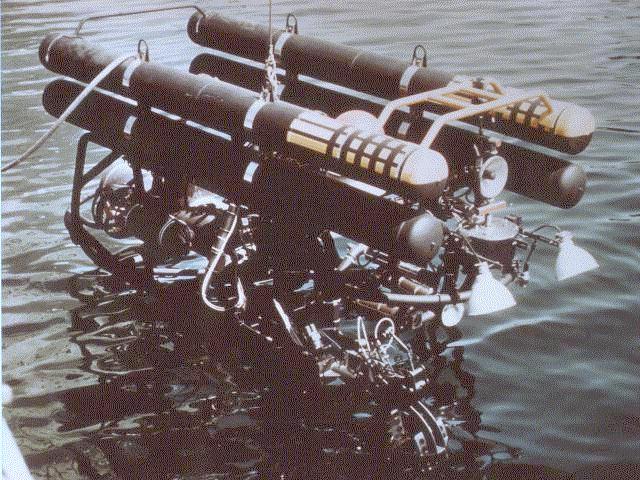
Remotely controlled unit with controlled-controlled Undersea Recovery Vehicle (CURV).
After this incident, the remote-controlled uninhabited unit CURV was used for further work. On April 7, with the help of the device, it was possible to attach two cables to the parachute, but when I tried to start the third cable, CURV also got confused and lost control. Attempts to free him ended in failure, and it was decided to raise the bomb with the device on two cables. The attempt ended successfully, and the bomb was raised on the deck of the rescue ship "Petrel" 81 days after the disaster.

According to the New York Times, this was the first ever case of a public demonstration of nuclear weapons.
The military continued to develop in the field of remote-controlled and autonomous vehicles. In the meantime, oilmen had an eye on technology.

“Remote-controlled unmanned underwater vehicles” (TNLA, ROV) began to gain popularity in the 1980s, when most of the new oil and gas development on the shelf exceeded the capabilities of divers. But in the mid-80s, the marine TNL industry suffered from a serious stagnation in technological development, caused, in particular, by the fall in oil prices and the global economic downturn.
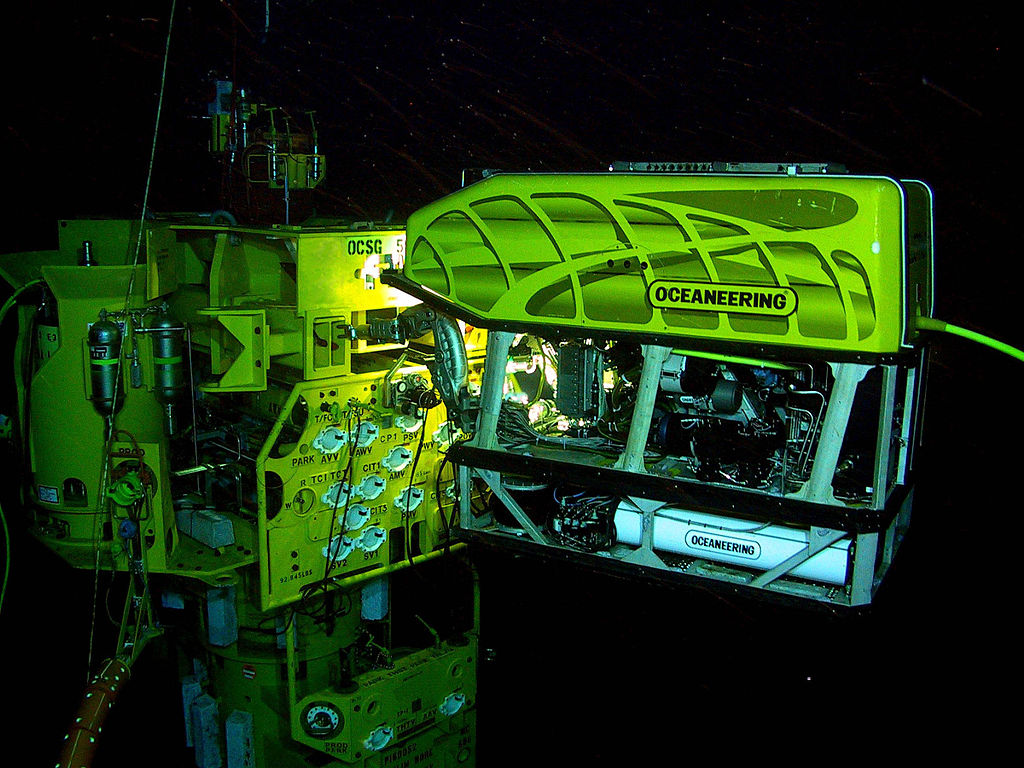
ROV in action at the underwater oil and gas field. TNP turns the nuts on the underwater design.

TNPA similar to this, are widely used in offshore mining. New technologies allow robots to dive even deeper.
Here, by the way, the legendary video, like a shark bites the underwater cable:

The Titanic sank on April 15, 1912. Attempts to find him were undertaken in 1953, in 1966, in 1970 and in the 1980s. (Read more here .)
According to the invoices, the Titanic transported a collection of jewelry worth about $ 300 million. In addition, on board were the originals of ruby and Omar Khayyam, as well as the mummy of the ancient Egyptian princess.
Robert Ballard discovered the Titanic in 1985. Although this "expedition" was just a cover. The operation was funded by the US Navy for secret reconnaissance of two nuclear submarines USS Scorpion and USS Thresher, which had sunk in the 1960s, and not the Titanic. The submarines sank in 1963 and 1968, respectively, and the naval forces wanted to find out if there was a leak of radiation.
ANGUS is a bunch of video cameras and cameras towed by a ship under water on a cable:
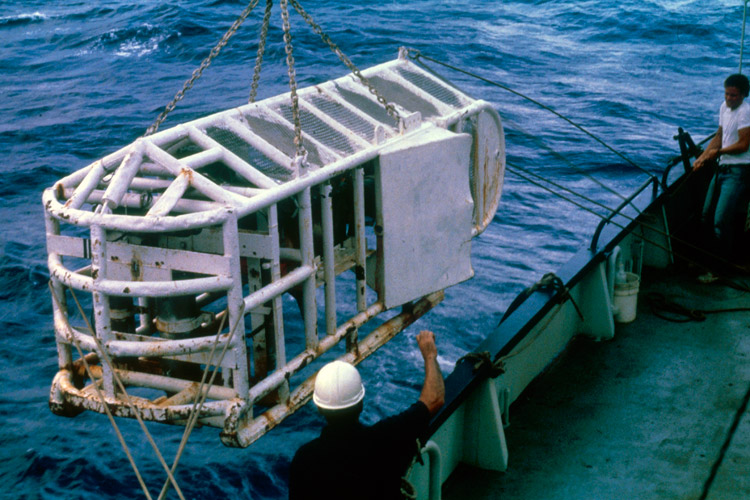
ANGUS (Acoustically Navigated Geological Underwater Survey). This unit had flaws: it was not operational enough. The footage could be developed and studied only after the apparatus was raised to the surface.
The creators of this device were those still funny. Engineers affectionately called the device "a fool on a string" due to the absence of even the simplest methods of control. The slogan for the ANGUS team was the phrase, “Although it’s leaking, it continues to tick.”
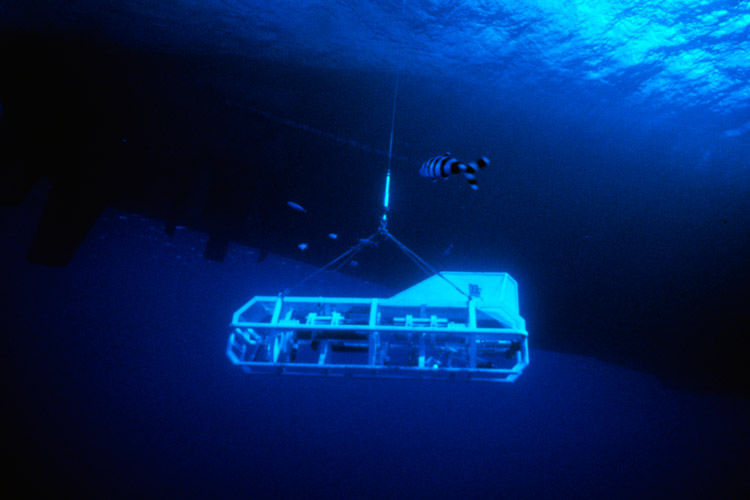
Argo, like ANGUS, was a metal structure equipped with five video cameras and two sonar systems.
On September 1, 1985, a monitor associated with the Argo video camera showed objects of non-natural origin. The next day, the Titanic corps was discovered, and ANGUS was sent to the bottom for a photo shoot.
Over the next four days, Argo and ANGUS took thousands of photographs. The wreckage of the "Titanic" was scattered over an area of 1600 meters in radius at a depth of about 3800 meters.
July 12, 1986, Ballard makes the second expedition to the Titanic. Now he has at his disposal a three-person Alvin bathyscaphe and remote-controlled robot Jason Jr.
.jpg)
"Alvin" - one of the most famous operating manned underwater vehicles (PPA). The bathyscaphe is designed for three people (two scientists and a pilot) and allows for 10 hours to dive to a depth of 4500 meters.

Jason Junior Apparatus (Jason Jr)

The study "Titanic" using the apparatus "Jason Junior".
In 1987, the National Geographic Channel filmed a documentary search for "Titanic", it was watched by James Cameron and inspired to create his masterpiece.
In September 1995, Cameron personally made 12 dives to the Titanic on the Mir-1 and Mir-2 submersibles aboard the Russian research vessel Akademik Mstislav Keldysh, later also involved in the film.
The film "Titanic" was worth more than the ship itself. Construction of the ship cost 4 million pounds, which in modern money is 100 million pounds, and the cost of the film James Cameron - 125 million pounds.
Contests are a great game mechanic that attracts young people and allows you to “career-guidance” a lot of specialists in the area of interest. The appearance of international competitions is an important milestone in the development of underwater UAVs and the formation of industry and the market.
RoboSub
Since 1998, international competitions have been held at the United States Space and Naval Systems Center.
Website - www.robonation.org/competition/robosub
Rules of 2017 (PDF).
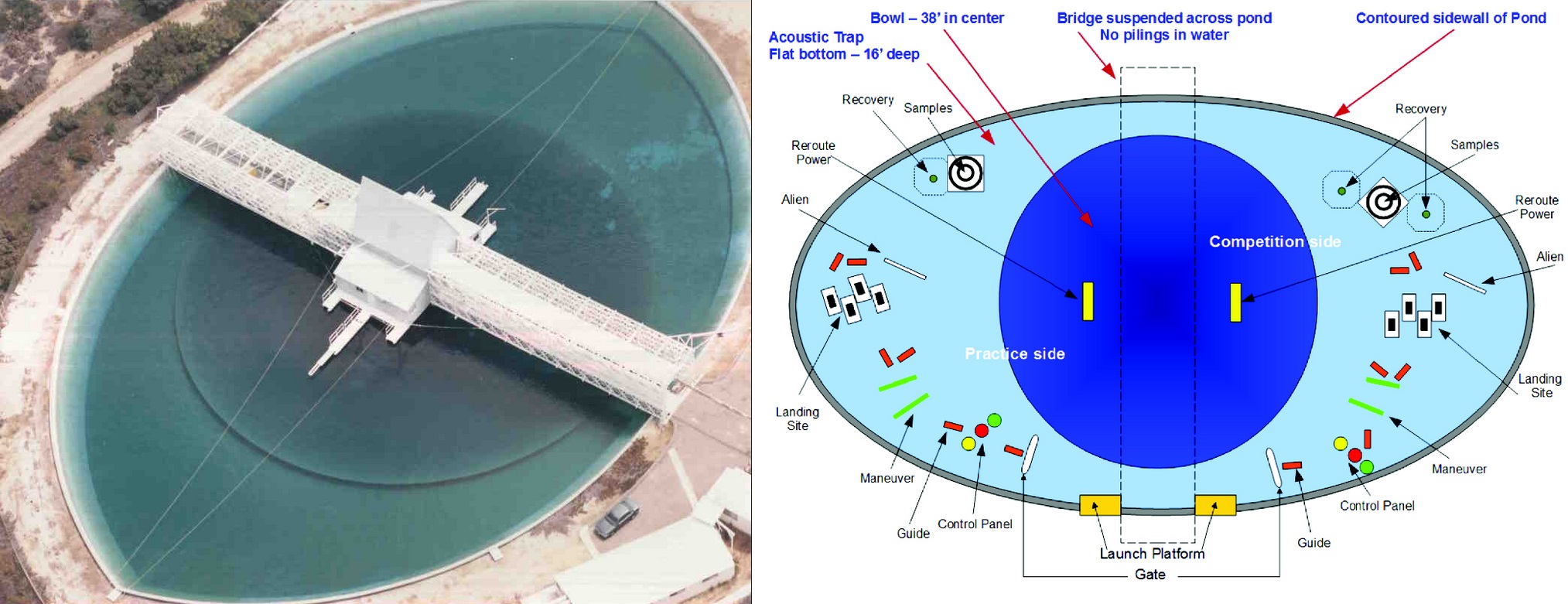

Autonomous underwater vehicles (AUVs) participate in the RoboSub competition, and perform realistic missions in a demanding underwater environment.

Founded by the International Association of Unmanned Machines, AUVSI Foundation is a non-profit organization that provides students with the opportunity to participate in practical activities in the field of robotics, aimed at stimulating and maintaining their interest in science, technology, engineering and mathematics (STEM).

Each year, AUVSI Foundation offers a number of educational programs, as well as robotic competitions, which allow students to apply their technical education outside the classroom. Such activities are an ideal preparation for professional activities, so students participating in them are often offered the desired internship and employment before graduation.
Singapore AUV challenge (SAUVC)
Asian Open Championship underwater robotics Singapore AUV Challenge (SAUVC), competitions have been held in Singapore since 2013.
Website - www.sauvc.org
Facebook page .
Rules 2018 .
Here is how the participant of the 2013 competition describes the tasks in his own words:
A detailed story about 2013 in underwater robotics here .

"Garage Startup" - this is how the story of Hewlett-Packard and Apple began, as well as many other Silicon Valley projects. When technology becomes available to “hackers,” they begin to experiment on their own and find tremendous solutions.
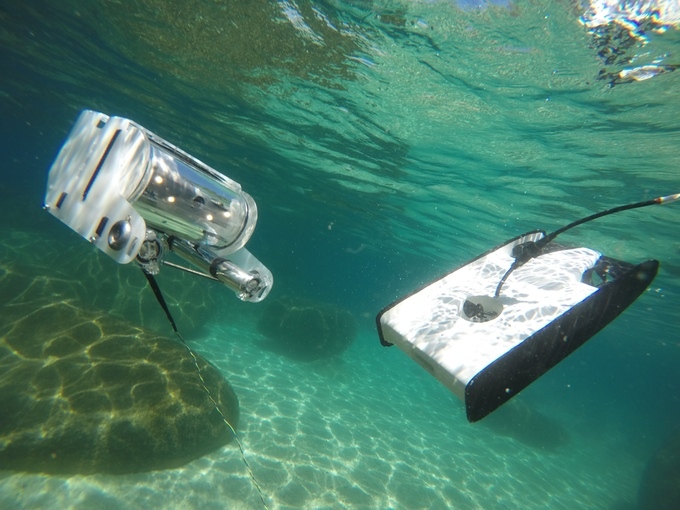
In 2012, the OpenROV project was launched on Kickstarter - a remote-controlled mini-underwater robot weighing about 2.5 kg. It is controlled from a laptop, equipped with a video camera with backlight. Immersion depth: up to 100 meters, battery life: ~ 1.5 hours. In motion, it is driven by three brushless motors (800Kv Brushless motor): two in the horizontal and one in the vertical plane. To get a visual picture, a regular webcam (Microsoft LifeCam HD-5000) is used, which is connected via USB to the BeagleBone.
The kit comes in the form of parts that need to be assembled. The project developers set a goal to make underwater research cheap and widely available, according to the principles of open source software and open source hardware. Drawings are available on GitHub .
TED Talk:

As the onboard computer used Beagle board .
Trident 2016 (next version of OpenROV)

Start-up OpenROV, USA is raising funds to build Trident underwater remote-control vehicle (ROV). The company planned to raise $ 50 thousand, but instead attracted more than $ 560 thousand.
OpenROV 2.8 and Trident drones
The control range is up to 100 meters. Weight - 2.9 kg. Maximum speed - 2 m / s. Battery life is 3 hours. Support automatic freeze and save driving direction. Can connect to virtual reality glasses for first-person management.
Gladius 2017
In 2017, another crowdfunding project of an underwater robot appeared on the IndiGoGo site.

4k video camera, 100 meters depth, 500 range, price 600-1700 dollars.
The designer for school students
MUR - JuniorSkills competition kit.

The development was presented by Sergey Moon from Vladivostok at the RoboFur 2015 exhibition in Khabarovsk on November 12.
Project site - murproject.com
On the basis of this designer, the STI Olympiad is held for high school students from all over Russia in the Water Robotic Systems profile.
At the qualifying stages it is necessary to solve puzzles in physics and computer science, as well as master the management of underwater robots on a 3D simulator.
In the final stage of the problem more interesting:
Back in 2017, the Water Intellectual Robotic Systems Olympiad was held in Innopolis. (The rules are here .)
I was very pleased to know that the team of developers of underwater UAVs from my city and my university (Far Eastern Federal University - FEFU) is so cool.

Since 2012, the joint team of FEFU and FEB RAS robotics engineers has become the prize winner in the autonomous robots class at the world RoboSub and Asian Championships of Singapore AUV Challenge.
And here is the “Junior”, a robot, with which the Vladivostok teamcaptures the depths of the pools winning prizes.

RoboSub
2012 - 5th place (FEFU, Vladivostok)
2013 - 3rd place (FEFU, Vladivostok)
2014 - 4th place (FEFU, Vladivostok)
2015 - 3rd and 6th place (Maritime University named after Nevelsky and FEFU, Vladivostok)
2016 - 4th place (Nevelsky Maritime University, Vladivostok)
2017 - 2nd place (FEFU, Vladivostok)
Singapore AUV challenge
2013 - 1st place (FEFU, Vladivostok)
2015 - 2nd place (FEFU, Vladivostok)
2016 - 2nd place (FEFU, Vladivostok)
2017 - 1st place (FEFU, Vladivostok)
About the Vladivostok team (interviews with developers, TTX of the robot, etc.) and about the rules of international competitions I will write in the next issue.
Then the technology migrated to the service of oil and gas magnates for building and maintaining oceanic production platforms.
The next milestone is the search for the Titanic (but in reality it was disguised underwater intelligence). But still these expeditions have brought considerable benefits for civil and scientific purposes.
To attract young people to the industry, in 1998, the Americans began to hold an international student competition, and in 2013 the Asian Open Championship started in Singapore.
The price of entry into the industry gradually declined: at first there were only military budgets, then oil corporations came, followed by universities, and finally, open source projects costing from $ 500 for "garage start-ups" appeared on the scene. And now there is even a DIY designer of underwater UAVs for schoolchildren.
Content
1. How to look for a thermonuclear bomb at the bottom of the Spanish sea
2. Ocean oil platforms
3. "Titanic" and secret underwater intelligence
4. International competitions: USA and Singapore
5. Open source projects, crowdsourcing and designer for schoolchildren.
6. Achievements of Russian student teams
Thermonuclear bomb search
Thermonuclear bomb B28RI, raised from a depth of 869 meters.
Air crash over Palomares .
Time magazine has included the incident in the list of the most serious nuclear disasters.
On January 17, 1966, an American strategic bomber B-52G with a thermonuclear weapon on board collided with a KC-135 tanker aircraft during refueling in the air. As a result of the disaster, 7 people were killed and four thermonuclear bombs were lost. Three of them landed on land and were found immediately, the fourth, which fell into the sea - only after two months of searching.
The search team included a diving expert, Captain Willard Searle, and a mathematician, Dr. John Craven, who, using the Bayesian theory of effectively finding lost objects , created a search plan.
The shells of the two B28 fusion bombs from Palomares.
For the search operations, a squadron of the US Navy was formed from 34 ships carrying more than three thousand sailors and civilian contractors. Scuba divers were used to explore the bottom at shallow depths of up to 24 meters; divers in hard suits worked at depths of up to 120 meters. Searches at great depths were performed by Alvin and Aluminaut underwater manned vehicles.
Alvin is one of the most famous operating manned underwater vehicles (PPA). The bathyscaphe is designed for three people (two scientists and a pilot) and allows for 10 hours to dive to a depth of 4500 meters.
The world's first aluminum submarine Aluminaut , 1964. On it, by the way, then drove Jacques Cousteau.
The bomb was discovered by "Alvin" at a depth of almost 800 meters. The bomb lay on the 70-degree slope of the fault, the depth of which reached 1300 meters. The first attempt to lift it, undertaken on March 26, having tied a cable to parachute lines, was unsuccessful. The bomb fell, and it was lost again. She was discovered on April 2. On April 5, a serious emergency arose when the Alvin got entangled in a parachute, the pilots of the vehicle lost sight of and could not free themselves for 15 minutes.
Remotely controlled unit with controlled-controlled Undersea Recovery Vehicle (CURV).
After this incident, the remote-controlled uninhabited unit CURV was used for further work. On April 7, with the help of the device, it was possible to attach two cables to the parachute, but when I tried to start the third cable, CURV also got confused and lost control. Attempts to free him ended in failure, and it was decided to raise the bomb with the device on two cables. The attempt ended successfully, and the bomb was raised on the deck of the rescue ship "Petrel" 81 days after the disaster.
According to the New York Times, this was the first ever case of a public demonstration of nuclear weapons.
The military continued to develop in the field of remote-controlled and autonomous vehicles. In the meantime, oilmen had an eye on technology.
Service of oil and gas industry and production platforms
“Remote-controlled unmanned underwater vehicles” (TNLA, ROV) began to gain popularity in the 1980s, when most of the new oil and gas development on the shelf exceeded the capabilities of divers. But in the mid-80s, the marine TNL industry suffered from a serious stagnation in technological development, caused, in particular, by the fall in oil prices and the global economic downturn.
ROV in action at the underwater oil and gas field. TNP turns the nuts on the underwater design.
TNPA similar to this, are widely used in offshore mining. New technologies allow robots to dive even deeper.
Here, by the way, the legendary video, like a shark bites the underwater cable:
Titanic
The Titanic sank on April 15, 1912. Attempts to find him were undertaken in 1953, in 1966, in 1970 and in the 1980s. (Read more here .)
According to the invoices, the Titanic transported a collection of jewelry worth about $ 300 million. In addition, on board were the originals of ruby and Omar Khayyam, as well as the mummy of the ancient Egyptian princess.
Robert Ballard discovered the Titanic in 1985. Although this "expedition" was just a cover. The operation was funded by the US Navy for secret reconnaissance of two nuclear submarines USS Scorpion and USS Thresher, which had sunk in the 1960s, and not the Titanic. The submarines sank in 1963 and 1968, respectively, and the naval forces wanted to find out if there was a leak of radiation.
ANGUS is a bunch of video cameras and cameras towed by a ship under water on a cable:
ANGUS (Acoustically Navigated Geological Underwater Survey). This unit had flaws: it was not operational enough. The footage could be developed and studied only after the apparatus was raised to the surface.
The creators of this device were those still funny. Engineers affectionately called the device "a fool on a string" due to the absence of even the simplest methods of control. The slogan for the ANGUS team was the phrase, “Although it’s leaking, it continues to tick.”
Argo, like ANGUS, was a metal structure equipped with five video cameras and two sonar systems.
On September 1, 1985, a monitor associated with the Argo video camera showed objects of non-natural origin. The next day, the Titanic corps was discovered, and ANGUS was sent to the bottom for a photo shoot.
Over the next four days, Argo and ANGUS took thousands of photographs. The wreckage of the "Titanic" was scattered over an area of 1600 meters in radius at a depth of about 3800 meters.
July 12, 1986, Ballard makes the second expedition to the Titanic. Now he has at his disposal a three-person Alvin bathyscaphe and remote-controlled robot Jason Jr.
"Alvin" - one of the most famous operating manned underwater vehicles (PPA). The bathyscaphe is designed for three people (two scientists and a pilot) and allows for 10 hours to dive to a depth of 4500 meters.
Jason Junior Apparatus (Jason Jr)
The study "Titanic" using the apparatus "Jason Junior".
In 1987, the National Geographic Channel filmed a documentary search for "Titanic", it was watched by James Cameron and inspired to create his masterpiece.
In September 1995, Cameron personally made 12 dives to the Titanic on the Mir-1 and Mir-2 submersibles aboard the Russian research vessel Akademik Mstislav Keldysh, later also involved in the film.
The film "Titanic" was worth more than the ship itself. Construction of the ship cost 4 million pounds, which in modern money is 100 million pounds, and the cost of the film James Cameron - 125 million pounds.
International competitions
Contests are a great game mechanic that attracts young people and allows you to “career-guidance” a lot of specialists in the area of interest. The appearance of international competitions is an important milestone in the development of underwater UAVs and the formation of industry and the market.
RoboSub
Since 1998, international competitions have been held at the United States Space and Naval Systems Center.
Website - www.robonation.org/competition/robosub
Rules of 2017 (PDF).
Autonomous underwater vehicles (AUVs) participate in the RoboSub competition, and perform realistic missions in a demanding underwater environment.
Founded by the International Association of Unmanned Machines, AUVSI Foundation is a non-profit organization that provides students with the opportunity to participate in practical activities in the field of robotics, aimed at stimulating and maintaining their interest in science, technology, engineering and mathematics (STEM).
Each year, AUVSI Foundation offers a number of educational programs, as well as robotic competitions, which allow students to apply their technical education outside the classroom. Such activities are an ideal preparation for professional activities, so students participating in them are often offered the desired internship and employment before graduation.
Singapore AUV challenge (SAUVC)
Asian Open Championship underwater robotics Singapore AUV Challenge (SAUVC), competitions have been held in Singapore since 2013.
Website - www.sauvc.org
Facebook page .
Rules 2018 .
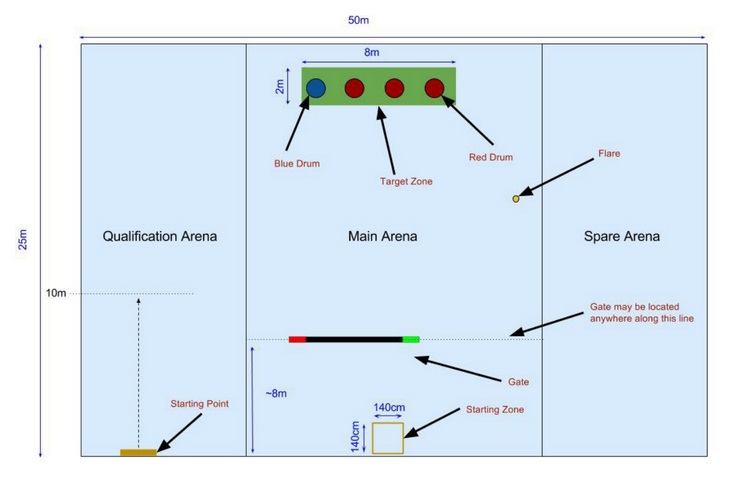
Here is how the participant of the 2013 competition describes the tasks in his own words:
“The task can be roughly described as follows: you need to go over the black stripe at the bottom of the pool and at some point emerge. That is, such a line-following robot. The rules, however, somewhat unclear, describe the whole thing. There are some gates through which to go. But if it is good to go over the strip, then you will pass through them automatically. There is also a rack on which the ball stands, and it must be kicked. Again, if you go well above the strip and at the correct height, then at the next turn you kick the ball automatically. And you need to emerge in the right place - when the black strip ends. In general, the whole competition was spinning around the black strip at the bottom :-). ”
A detailed story about 2013 in underwater robotics here .
Openrov
"Garage Startup" - this is how the story of Hewlett-Packard and Apple began, as well as many other Silicon Valley projects. When technology becomes available to “hackers,” they begin to experiment on their own and find tremendous solutions.
In 2012, the OpenROV project was launched on Kickstarter - a remote-controlled mini-underwater robot weighing about 2.5 kg. It is controlled from a laptop, equipped with a video camera with backlight. Immersion depth: up to 100 meters, battery life: ~ 1.5 hours. In motion, it is driven by three brushless motors (800Kv Brushless motor): two in the horizontal and one in the vertical plane. To get a visual picture, a regular webcam (Microsoft LifeCam HD-5000) is used, which is connected via USB to the BeagleBone.
The kit comes in the form of parts that need to be assembled. The project developers set a goal to make underwater research cheap and widely available, according to the principles of open source software and open source hardware. Drawings are available on GitHub .
TED Talk:
As the onboard computer used Beagle board .
Trident 2016 (next version of OpenROV)
Start-up OpenROV, USA is raising funds to build Trident underwater remote-control vehicle (ROV). The company planned to raise $ 50 thousand, but instead attracted more than $ 560 thousand.
OpenROV 2.8 and Trident drones
The control range is up to 100 meters. Weight - 2.9 kg. Maximum speed - 2 m / s. Battery life is 3 hours. Support automatic freeze and save driving direction. Can connect to virtual reality glasses for first-person management.
Gladius 2017
In 2017, another crowdfunding project of an underwater robot appeared on the IndiGoGo site.
4k video camera, 100 meters depth, 500 range, price 600-1700 dollars.
The designer for school students
MUR - JuniorSkills competition kit.
The development was presented by Sergey Moon from Vladivostok at the RoboFur 2015 exhibition in Khabarovsk on November 12.
Project site - murproject.com
On the basis of this designer, the STI Olympiad is held for high school students from all over Russia in the Water Robotic Systems profile.
At the qualifying stages it is necessary to solve puzzles in physics and computer science, as well as master the management of underwater robots on a 3D simulator.
In the final stage of the problem more interesting:
- assembly of two underwater robots from the designer (the MUR designer is proposed);
- Both robots must go the distance, focusing on underwater objects. But only one robot is equipped with cameras, the second one should receive a signal from the first robot;
- development of own communication device between robots using the proposed components and having access to the protocols and electrical circuits of the constructor;
- organization of communication between robots.
Back in 2017, the Water Intellectual Robotic Systems Olympiad was held in Innopolis. (The rules are here .)
Russia, Vladivostok
I was very pleased to know that the team of developers of underwater UAVs from my city and my university (Far Eastern Federal University - FEFU) is so cool.
Since 2012, the joint team of FEFU and FEB RAS robotics engineers has become the prize winner in the autonomous robots class at the world RoboSub and Asian Championships of Singapore AUV Challenge.
And here is the “Junior”, a robot, with which the Vladivostok team
RoboSub
2012 - 5th place (FEFU, Vladivostok)
2013 - 3rd place (FEFU, Vladivostok)
2014 - 4th place (FEFU, Vladivostok)
2015 - 3rd and 6th place (Maritime University named after Nevelsky and FEFU, Vladivostok)
2016 - 4th place (Nevelsky Maritime University, Vladivostok)
2017 - 2nd place (FEFU, Vladivostok)
Singapore AUV challenge
2013 - 1st place (FEFU, Vladivostok)
2015 - 2nd place (FEFU, Vladivostok)
2016 - 2nd place (FEFU, Vladivostok)
2017 - 1st place (FEFU, Vladivostok)
About the Vladivostok team (interviews with developers, TTX of the robot, etc.) and about the rules of international competitions I will write in the next issue.
Sources
- Plane crash over Palomares , Wikipedia
- Palomares. Hydrogen bombs on the beach , TopWar
- Full immersion: how the use of robots in search of "Titanic" changed the approach to underwater research , T & P
- Unusual ways to raise the "Titanic": versions of scientists , RIA Novosti
- Robert Bollard explores the oceans , TED
- Way of James Cameron , Wired, Geektimes
- James Cameron: Before Avatar ... an inquisitive boy , TED
- RoboSub
- Robosezon 2013: from under water to the sky , Geek magazine
- OpenRov , Wikipedia
- OpenROV - underwater robot (open source) , Habrahabr
- David Lang: My Underwater Robot , TED
- Underwater drone OpenROV Trident , Geektimes
- The designer for school students of Micro Underwater Robot Edu
- STI Olympiad: Water Robotic Systems
All Articles