Quadcopter as a method for rapid deployment of Wi-Fi networks

Earlier in our publications, we have repeatedly raised the topic of the use of quadcopters in telecommunications. Several materials on this topic based on practical applications have appeared in our blog.
However, today we will discuss the use of Copters in the organization of wireless networks. This has been said and remembered more than once that Facebook was going to distribute the Internet across the entire planet with the help of drones. The drones were also used in the Emergency Situations Ministry, for example, when organizing a short-term radio coverage when organizing various rescue operations or other activities. In general, in all those situations in which rapid deployment of wireless networks is necessary.
In this material I would like to present a study of foreign experts, in which the results of an experiment with a drone acting as an access point are clearly demonstrated.
About the methodology and features of the devices of the experiment
The main element of the system was the Intel Galileo board. The board is based on a 32-bit Quark SoC x 1000 Intel CPU with a clock frequency of 400 MHz. The software used was Linux version of quark 3.19.8 yocto-standard. The power source is a 10400 mAh battery capable of providing Galileo with up to 15 hours of battery life. An Intel Dual Band Wireless-AC 7260 wireless card was connected to the Galileo board through the PCI Express port. The card is capable of providing data transfer rates of up to 867 Mbps. Works on several Wi-Fi standards (802.11a / b / g / n / ac). Two external antennas with a gain of 5 dBi were connected to the card. The total weight of the Galileo board, battery, and the entire antenna part was 340 grams.
The first stage of the experiment consisted in the study of the theoretical possibilities of covering the drone. The calculation was made using radio propagation models: “Free Space” and the model “Wireless Initiative New Radio” –WINNER D1.
Using these models, the estimated maximum propagation distances were calculated for the uplink and downlink channels of several Wi-Fi versions. In addition, Galileo's board performance was measured as an intermediate Wi-Fi network node.
The experiment was based on two modes of operation of wireless access points. The first - “Infrastructure” - is implemented in most commercial Wi-FI networks. In this mode, the access point is the central communication hub, connecting devices on the network and serving as a gateway to the Internet. In this mode, the access point assumes all network management tasks.
The second mode is “Ad-Hoc”. It is no less common and is a mesh network where none of the access points is central. All nodes are equal and each takes on the tasks of the host or router. Ad-Hoc nodes can move to form a so-called mobile network (Mobile Ad-hoc NETwork - MANET). The advantage of this mode is that the connection between nodes can be dynamically changed when moving devices. But the effective operation of such a network can strongly depend on the routing algorithms responsible for delivering a packet between network nodes. Due to the dynamic nature of the network topology, the “cost” of the path between nodes must be periodically recalculated to find the best path.
For tests in the network connected two additional devices. Two laptops with Linux Ubuntu OS and Wi-Fi card IEEE 802.11 a / b / g / n acted as network nodes. A laptop with an Intel Centrino Advance-N 6230 wireless card was installed on the receiving side and a notebook with an Intel Dual Band 3160 card was installed on the other end. The Intel Galileo board that operated in AP mode (infrastructure mode) or as one of the intermediate nodes (Ad-Hoc) between the transmitter and receiver. In the latter device, the routing protocol BATMAN was used, which proved to be excellent. Obtaining network metrics was carried out using iPerf3. In this experiment, transmission was used with a constant speed between network nodes with the following parameters: the duration of the transmission - 30 seconds; transmission speed: 1, 3, 5, 7, 9, 11 Mbit / s; packet size: 512 and 1024 bytes.
Measurements of parameters of a real air network were made according to the following scheme:
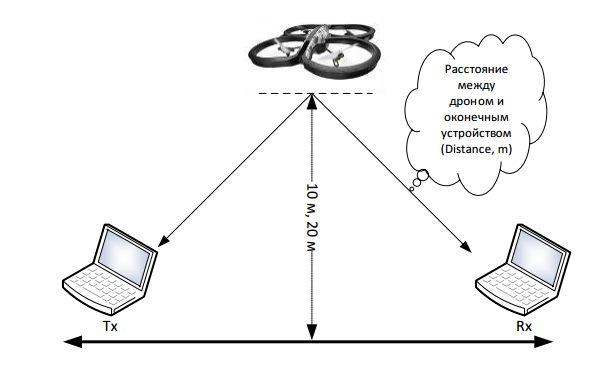
The two terminals were gradually removed from each other along the X axis. The network bandwidth was measured at points using the iPerf3 network analyzer, and the maximum signal level using the Rohde & Schwarz FSH3 spectrum analyzer. The quadcopter hung at a height of 10 and 20 meters, on which measurements were made. It looked like a drone:

Radius of action
As we already noted in the basis of the experiment, we measured the communication range and the calculation of the coverage according to the Free Space radio propagation models and the WINNER D1 model. The Friis formula is used when it is necessary to calculate the length of the radio signal between the transmitter and the receivers in the absence of obstacles between them.
This model is used only when calculating fields in the far field, the calculation is made according to the formula:

The WINNER D1 model is a stochastic model. It takes into account losses in the wireless communication channel. Determined by the formula:

In it, the undefined literal variables have the following values A = 21.5, B = 44.2, and C = 20.
In the calculations, the transmitter power for Uplink and Downlink was assumed to be 20 dBm (100 mW). The calculation of the communication range was made for different versions of the IEEE 802.11 standards. The table below shows the calculation results for the downlink (Downlink) and uplink (Uplink). In the calculations it was assumed that the UAV is at a height of 10 m.
In a real experiment, the received signal level was estimated. The figure below shows the signal level depending on the distance for the infrastructure operation mode (left) and Ad-hoc mode (right) when the drone is operating at a height of 10 meters.

The same experimental data but for the work of a drone at a height of 20 meters:
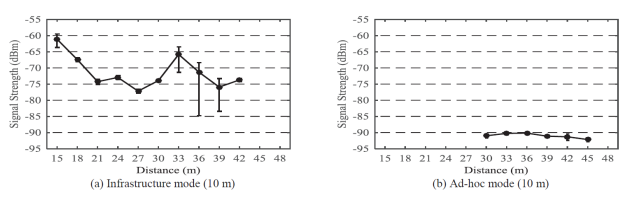
The results show a noticeable difference between theoretical and practical values. They are caused by many additional factors. However, in general, the received signal level is significantly higher than the signal received in Ad-hoc. Figures b and d depict fewer measured control points, since only those measurements that were obtained when the UAV operated as an intermediate point between two terminals were recorded. The results obtained by directly connecting the transmitter and receiver of the laptop were not taken into account. In other words, when the distance between the end access points was less than 60 meters (for a drone’s height of 10 meters) or 80 meters (for a height of 20 meters), the quadcopter did not act as an intermediate device in Ad-hoc mode.
Data transfer rate
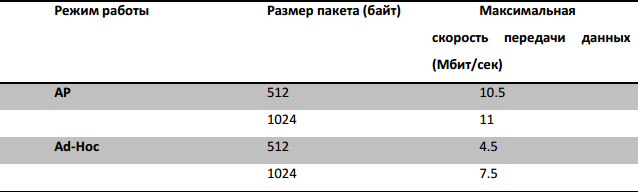
To assess the performance of the infrastructure mode of operation and the Ad-hoc mode in terms of maximum throughput, the iPerf program was used, with the help of which the packets were launched between the end access points. The first measurements were carried out in laboratory conditions. Speed was measured in several modes of operation and packets of 512 and 1024 bytes in size.
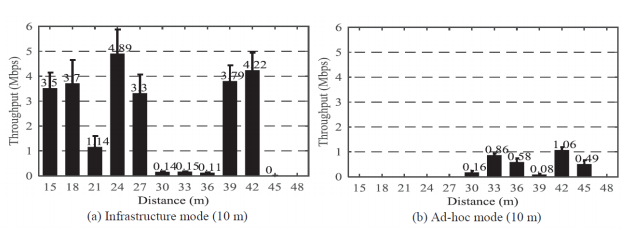
The following measurements were carried out in real conditions. The speed in infrastructure mode is higher than the speed in the Ad-hoc network.
For infrastructure operation (left) and Ad-hoc mode (right) when the drone is operating at a height of 10 meters:
The same experimental data but for the work of a drone at a height of 20 meters:
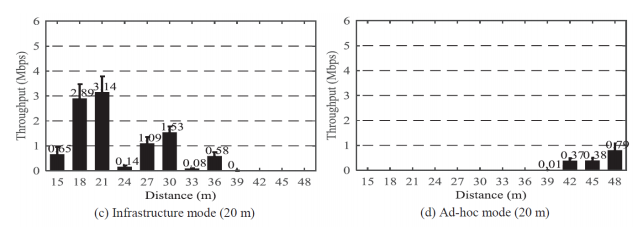
The maximum data transfer rate for Wi-F varies depending on the 802.11 version. It is mainly determined by modulation methods, channel width, number of spatial streams, coding, and spreading methods.
The maximum achievable speeds for the experiment in question are listed below:
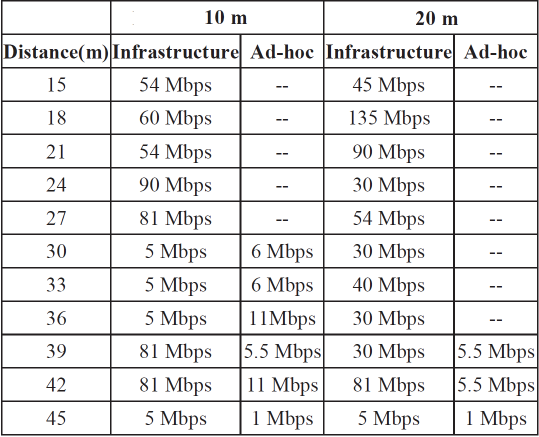
Increasing the distance affects the quality of communication. In turn, this forces network cards to resort to more conservative modulation techniques and lower data rates. In infrastructure mode, it turns out to withstand higher transmission speeds.
Above, in the course of the experiments, it was clearly shown what possibilities are opening up when using quadrocopters for scanning wirelessly automatically configured mesh networks. With the development of communication technologies and unmanned aerial vehicles, the possibilities for the development of just such a method of building a network will be many times greater
All Articles