すべての読者へのご挨拶!
今年の夏でさえ、私はいくつかの小型ロボットを作成し、それらに相互に通信する方法を教えるというアイデアに圧倒されました。 ロボットを1つ作成すると、あらかじめ定義された基本的な機能セットが既にあり、残りの機能は予算のサイズによってのみ決まります。 :)標準的なロボット能力(障害物のバイパス、移動距離の計算など)を使用すると、他の同様のロボットとのコミュニケーションツールをインストールできるため、集合的な精神はより興味深いものになります。 そして、一緒に、彼らはすでにそれらを個別に解決する場合、より時間がかかる問題を解決することができます(例:t。Aからt。Bへのルートを見つける)。
そして可能な限り、この方向での私の作業の進捗状況を説明します。
それがすべて始まった方法。
第一に、ロボットの寸法は主にそれに依存していたため、力学を決定する必要がありました。 Webの広大さの中で、ロボット製造業者にスペアパーツを供給する良い店が見つかりました: www.sparkfun.com
私は高品質のモデルを作りたかったので、ギアボックス付きモーターがそこで注文されました:

それらへの車輪:

そして、ヒープに、これらのセンサーのいくつか:

ロボット自体は、「サンドイッチ」に基づいて組み立てることが決定されました。
エンジンとドライバーは最初の「レイヤー」に配置されました。

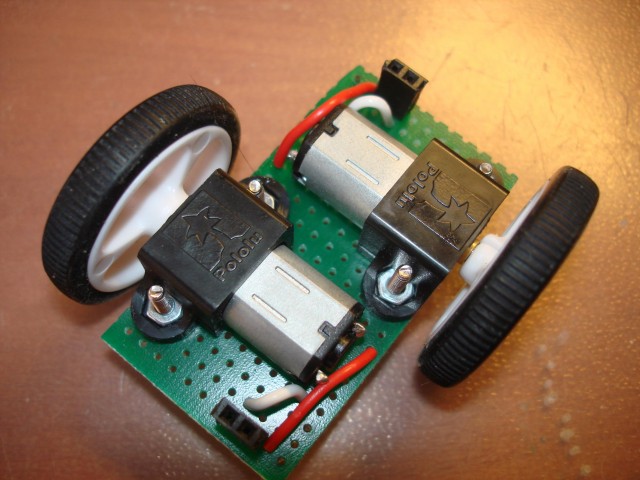
2番目の層には、コントローラーとその他の電子機器がありました。
通信スキームはまだ完成していないため、初期段階ではロボットは次のように見えました。

寸法は非常に小さく、55x50 mmでした。
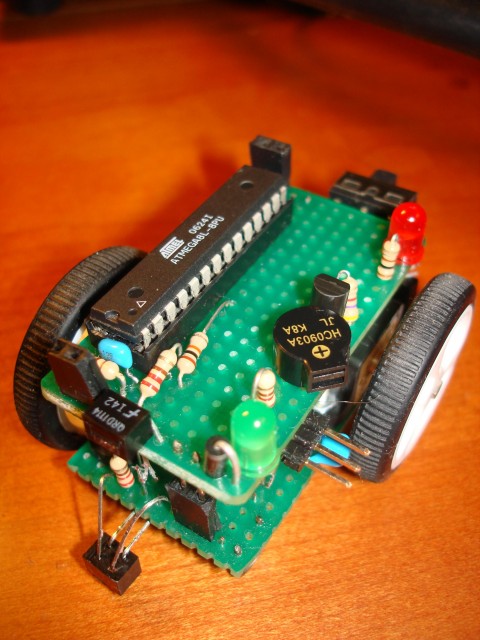
「Ant」には次の機能があります。
- 障害物検出
- エッジ検出
- 光センサー(光がない場合、彼はそれを探し始め、より速く走りました)
- 気分インジケータ
- 音声信号
ロボットのビデオ:
次は何ですか
そして、私は2つのプロジェクトを破裂させました-これと追跡ロボットについては、ここで読むことができます: habrahabr.ru/blogs/DIY/76128
そのため、通信回路を備えた「レイヤー」が燃え上がり、非常に高品質でない回路基板のためにロボット自体が崩壊し始めました。
学期が始まったため、アイデアは少し忘れられ、十分な時間はありませんでした。 そして今、私は再びこの考えに火をつけましたそして、静かにプロジェクトの作業を再開します。 スキームが変更され、モーターが調整され、本体が薄いPCBで作られます。 最も重要な原則は、すべての回路がプリント基板上に作成されるのではなく、ロボットに「生物工学」または何かを与えるために「重量」に配置されることです。 :)
また、バッテリーはプラスチックケースから免れたため、サイズが小さくなりました。
今、私はコミュニケーションスキームの理論に取り組んでいます。
その本質は、ロボットの周囲に沿って、異なる信号を送信する送信機と他のロボットからの信号を受信する受信機があるということです。 信号が異なるため、ロボットは互いの位置を決定し、それに応じて正しい方向に移動できます。移動の精度は、設定されたエンコーダーによって決定されます。
実際のところ、これですべてです。 新年の後、私の作品の次の段階を公開します。
みんなありがとう!