Microsoft Robotics Studioをダウンロードする
一連の記事では、研究室での作業について説明したいhttp://msdn.microsoft.com/en-us/library/dd772008.aspx 暇なときにそれらを翻訳し、テストし、それらを説明したいと思います。 ところで、それらはインストール直後にあります:Samples \ VplHandsOnLabs \
最初の実験では、マニピュレーターを使用してロボットを制御する方法を説明します。 マニピュレータ-デスクトップジョイスティックと、ホイールのデータを受信するセンサー(Generic Differential Drive(GDD)と呼ばれる)の2つのサービスが必要です。
それらをダイアグラムにドラッグしてリンクします。

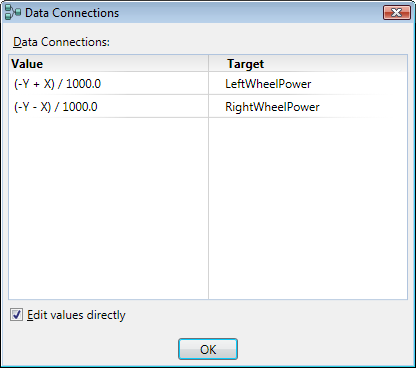
デスクトップジョイスティックの側面からの接続プロパティは非常に重要です。UpdateAxesを配置します。 マニピュレーターの側で新しい変更を送信するたびに。 また、GDDの場合、SetDrivePowerをインストールします。SetDrivePowerは、指定された式に従ってホイールパワーを設定します。

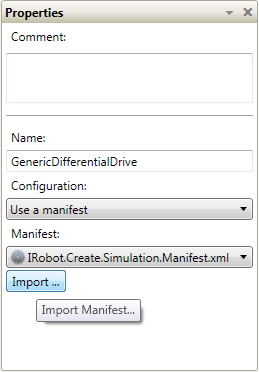
Roboticsには多くのタイプのロボットがあり、物理レベルでも簡単に動作し、Bluetoothまたは赤外線で通信します。 作成したダイアグラムは、必要なマニフェスト(.xml形式の特定のロボットの設定)を選択して、他のロボットで実行できます。 チャートには、iRobot Createを選択します。これは、ちなみに他の実験室で使用されます。
[ プロパティ ]パネルの右側(標準)で、[ マニフェストを使用 ]を選択し、[ インポート ]をクリックして、使用することに同意したロボットを選択します。
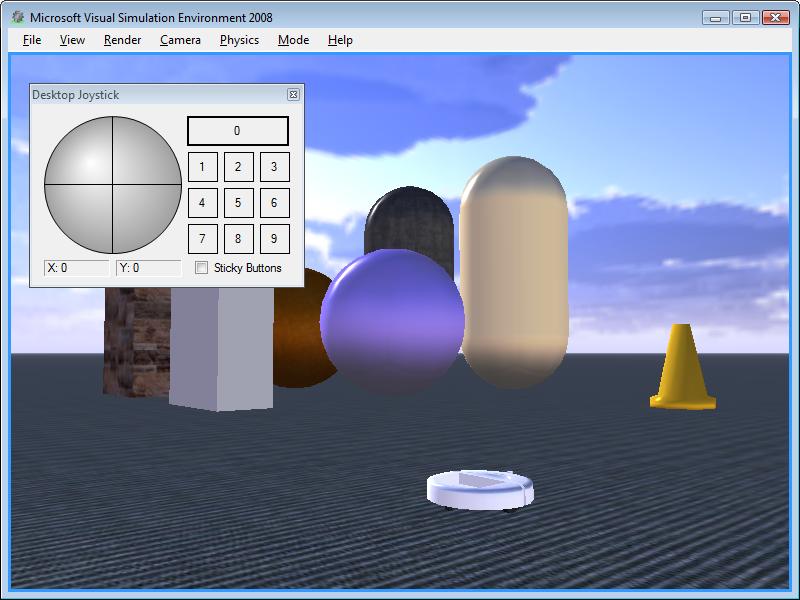
保存してF5を押すと、標準環境と、デスクトップジョイスティックを使用して制御されるロボットが取得されます。
この作業は非常に簡単です。次回ロボットのセンサーをプログラムする方法について説明します。