Chang'e-4着陸船とYutu-2ローバーの月の向こう側での5回目の地球月の作業が始まりました。
両方のデバイスは、月明かりの冷え込んだ夜の4回目をうまく生き延びました。現在、スリープモードから抜け出し、月の裏の複雑な表面と周囲の宇宙での研究を続けています。
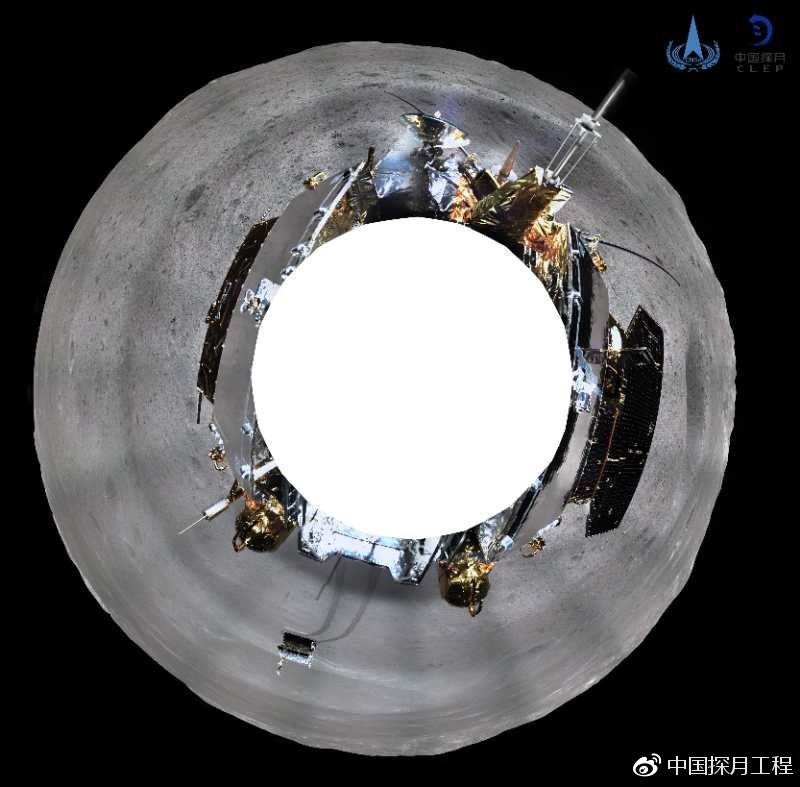
月の裏、打ち上げと着陸の瞬間の新しい写真。
注意、出版物の中にはたくさんの写真があります。
Chang'e-4ミッションに関する以前に公開された資料:
1. Chang'e-4宇宙船が月の裏側に着陸し、最初の写真を送信しました
2.準備と着陸のプロセスのオンボードビデオ、およびChang'e-4の月の裏側のパノラマ
3.月面の最初のメートルであるローバー「Yutu-2」の降下のビデオ。 月の2週間の睡眠は終わった
4.誇りと情熱、夢を宇宙プロジェクトに変える物語
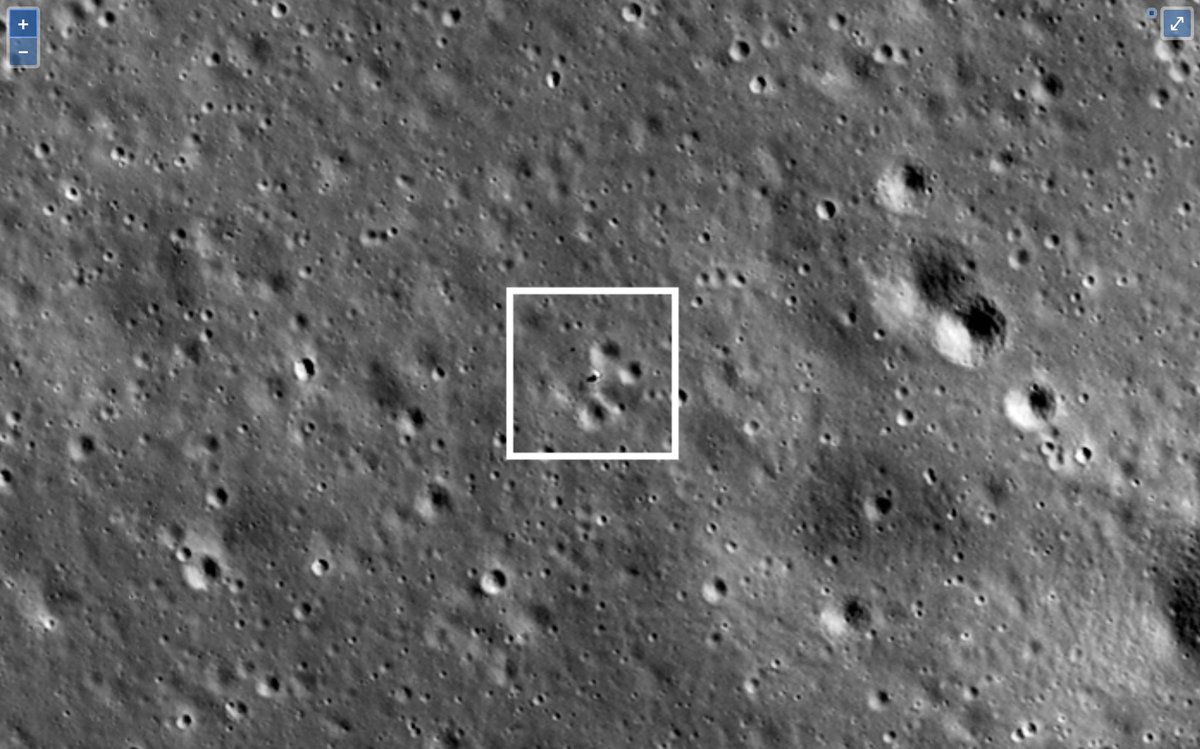
5. NASAの月周回探査機は、中国のChang'e-4ステーションの最初の写真を撮りました-2ピクセルの光
6. Chang'e-4モジュールとYutu-2ローバーは、月の向こう側の2泊目の準備ができています
7. NASAの月周回探査機は、中国のChang'e-4ステーションの新しい写真を撮影しました。
8.中国の月計画とChang'e-4宇宙ミッションの歴史に関する興味深い事実
9. Chang'e-4ミッションは月の3日目です。 ローバー「Yutu-2」〜石探し
10. Chang'e-4ミッション-着陸モジュールと中継衛星上の科学機器
11. Chang'e-4ミッションは、着陸モジュールとYutu-2ローバーの4番目の月曜日です。 デバイス上のカメラとコントローラーについて
1. Chang'e-4宇宙船が月の裏側に着陸し、最初の写真を送信しました
2.準備と着陸のプロセスのオンボードビデオ、およびChang'e-4の月の裏側のパノラマ
3.月面の最初のメートルであるローバー「Yutu-2」の降下のビデオ。 月の2週間の睡眠は終わった
4.誇りと情熱、夢を宇宙プロジェクトに変える物語
5. NASAの月周回探査機は、中国のChang'e-4ステーションの最初の写真を撮りました-2ピクセルの光
6. Chang'e-4モジュールとYutu-2ローバーは、月の向こう側の2泊目の準備ができています
7. NASAの月周回探査機は、中国のChang'e-4ステーションの新しい写真を撮影しました。
8.中国の月計画とChang'e-4宇宙ミッションの歴史に関する興味深い事実
9. Chang'e-4ミッションは月の3日目です。 ローバー「Yutu-2」〜石探し
10. Chang'e-4ミッション-着陸モジュールと中継衛星上の科学機器
11. Chang'e-4ミッションは、着陸モジュールとYutu-2ローバーの4番目の月曜日です。 デバイス上のカメラとコントローラーについて
Yutu-2ローバーは、2019年4月28日の朝、4月28日の夕方にスリープモードから復帰し、Chang'e-4着陸機も目を覚まし、両車両は月の5日目のシフトを開始しました。
夜、Chang'e-4モジュールのセンサーによると、月の向こう側で、月面の温度はマイナス190度まで(最低)下がります。
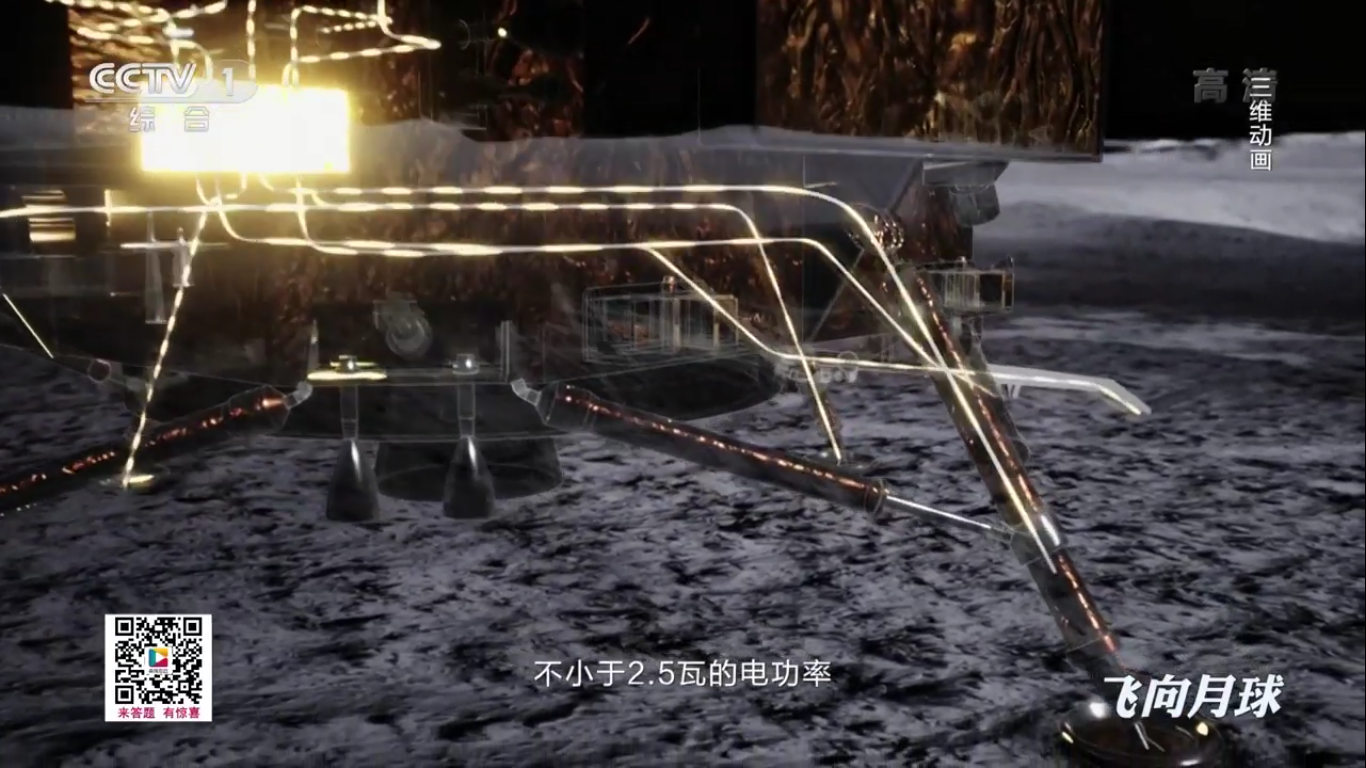
ロシア連邦原子力センター(VNII実験物理学(VNIIEF))で開発された加熱ユニットは、月明かりの夜にChang'e-4モジュールを加熱する役割を果たします。これらは、中国のシステムに電力を供給するために設計された放射熱源(RIT)および放射性同位体電源(RTG)です月のミッション。
Chang'e-4月ミッションのプロジェクトとモジュールに関するデータ:
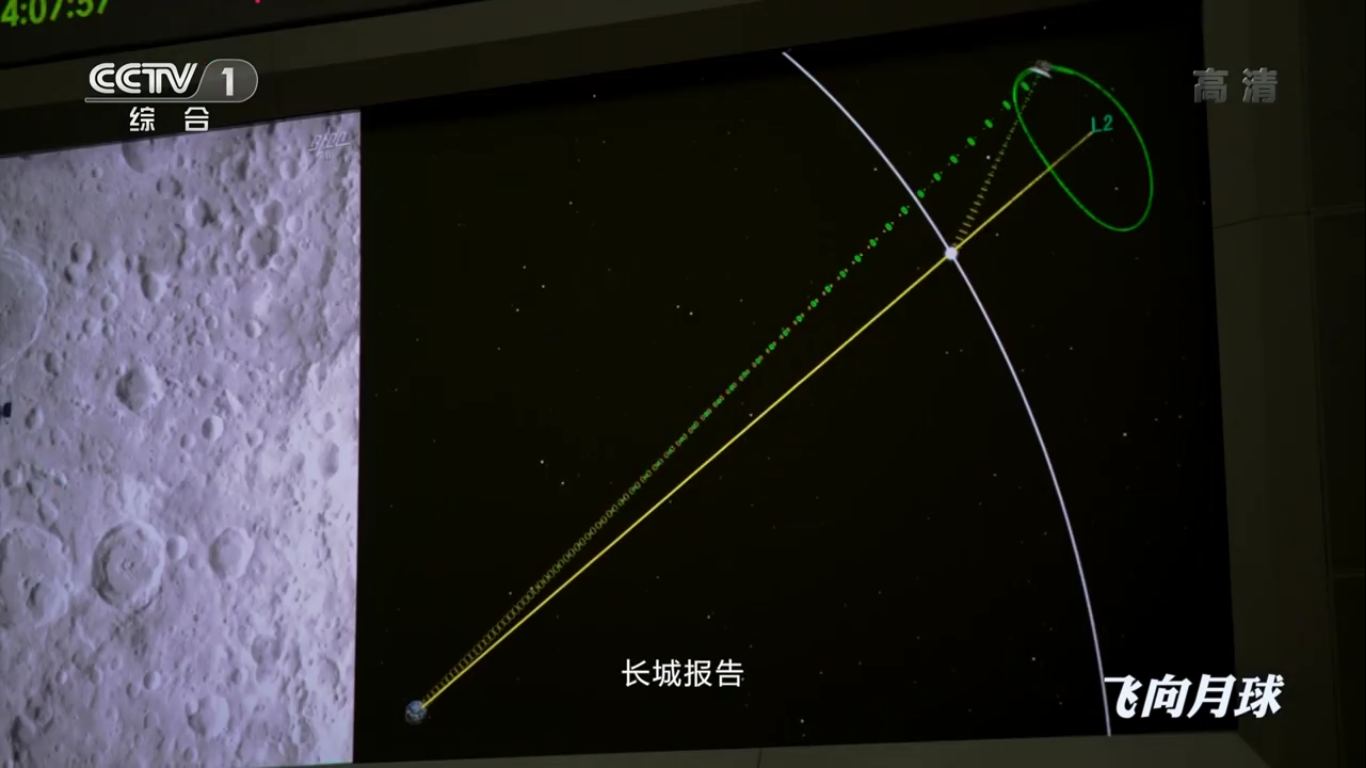
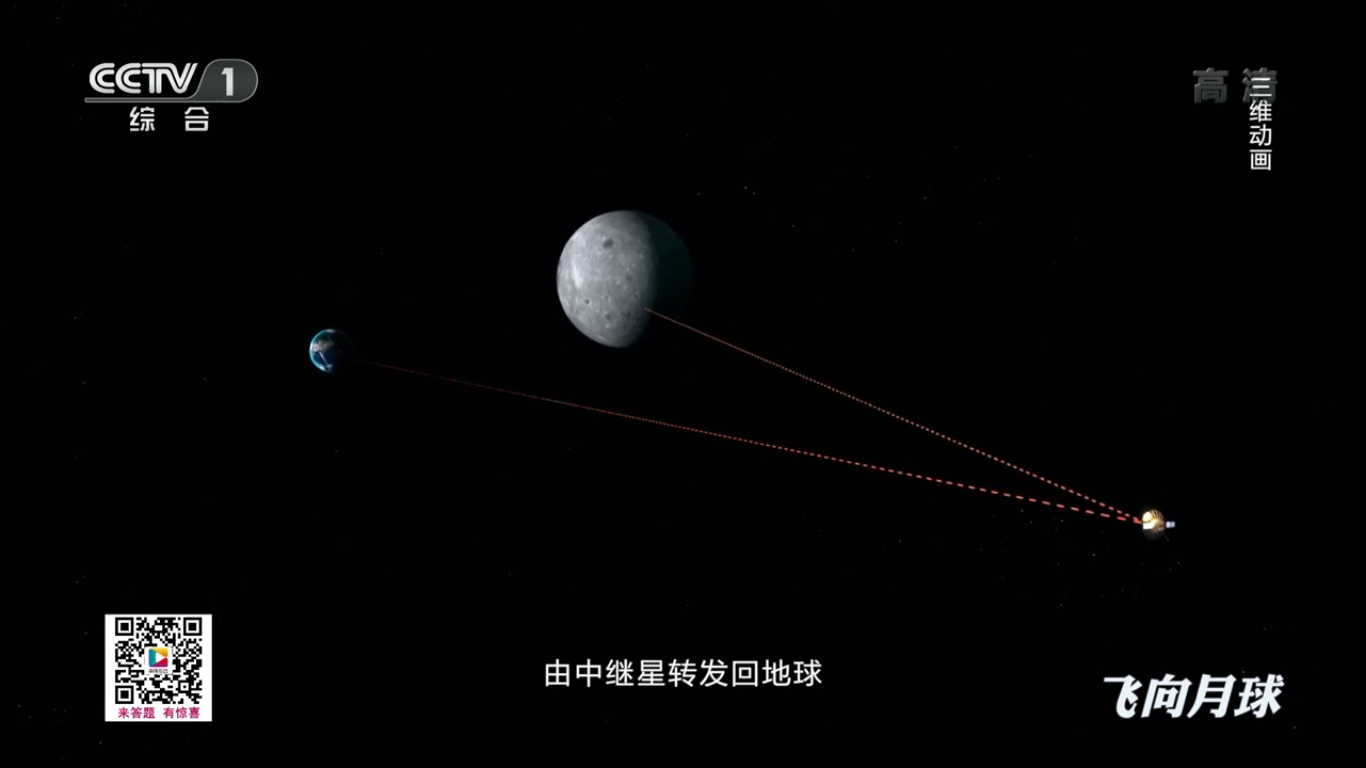
2018年5月21日:衛星中継Tseyutsiao(フォーティスブリッジ)は、西昌中国の宇宙基地から打ち上げられました。地球と月の裏側の間の通信を組織するために必要です。
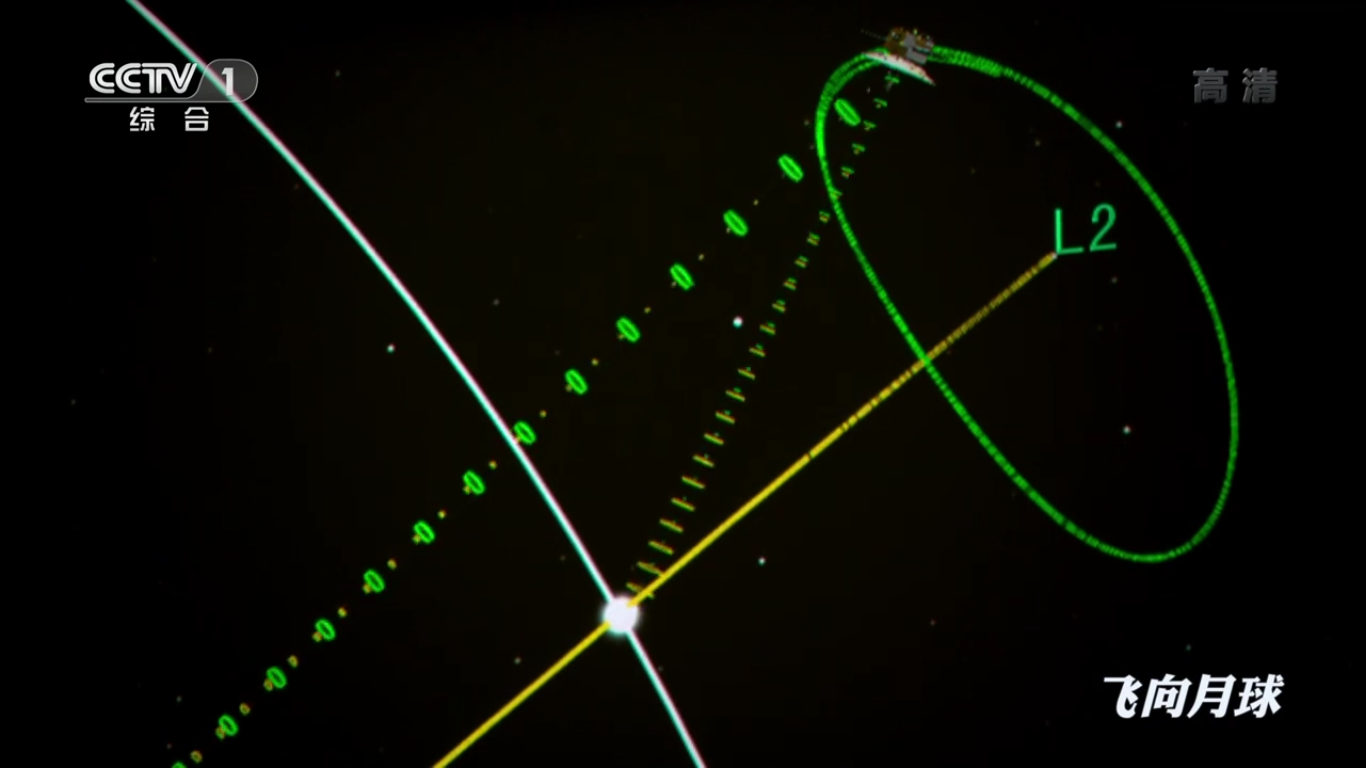
2018年6月14日:Tseyuqiao衛星リレーは、月から約65,000 kmの地球-月システムのラグランジュ点L2の周りの軌道に入り、世界でこの軌道の最初の通信衛星になりました。
2018年12月8日:Chang'e-4ステーションを備えたChangzheng-3Bブースターロケットが、中国のSichan宇宙センターから正常に打ち上げられました。
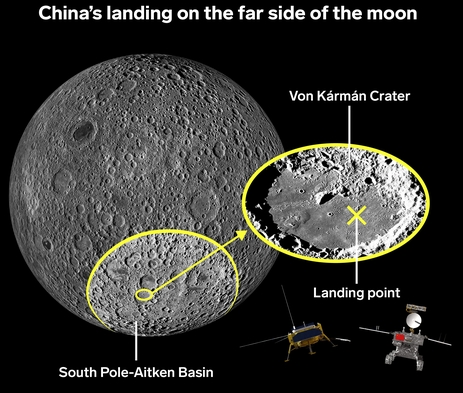
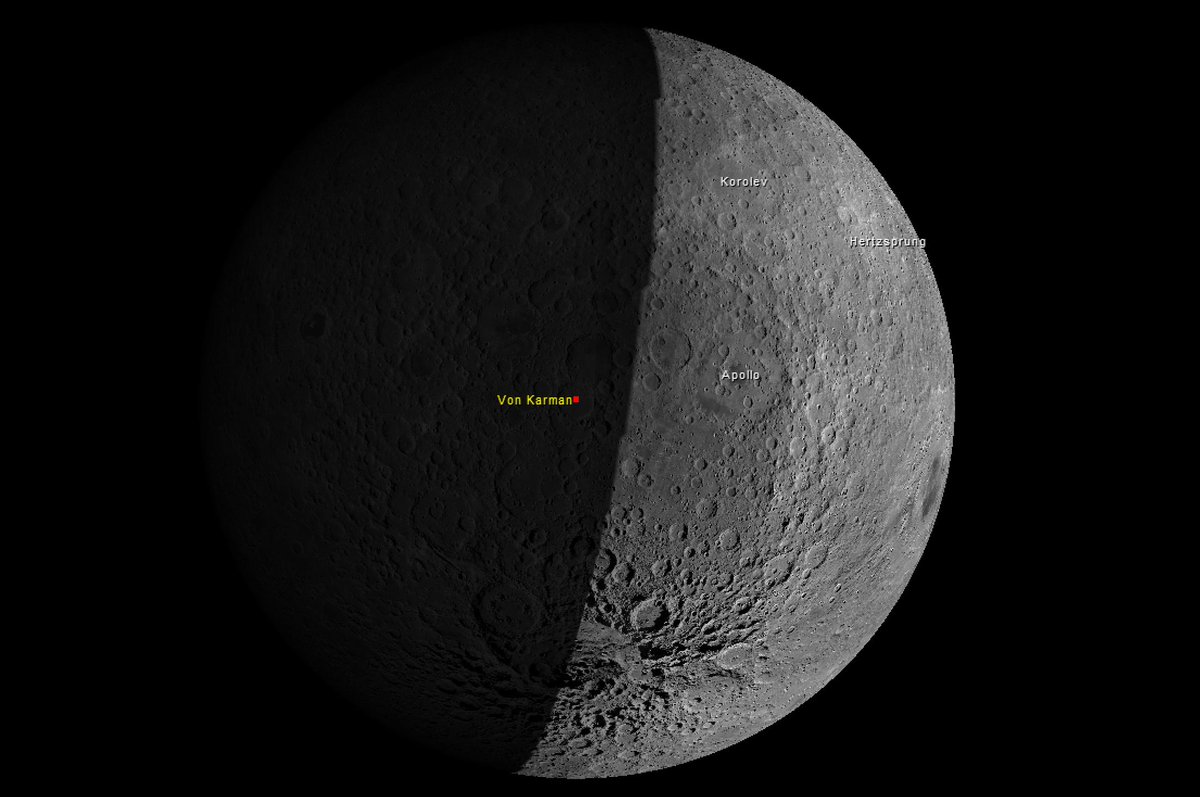
2019年1月3日:Chang'e-4着陸船が月の向こう側のカルマンクレーターに着陸します。 Chang'e-4着陸機には、2番目の中国の月面探査機Yutu-2(Yutu探査機の近代化された類似体)が含まれています。 Chang'e-4ミッションの装置は正常に動作し続けます。
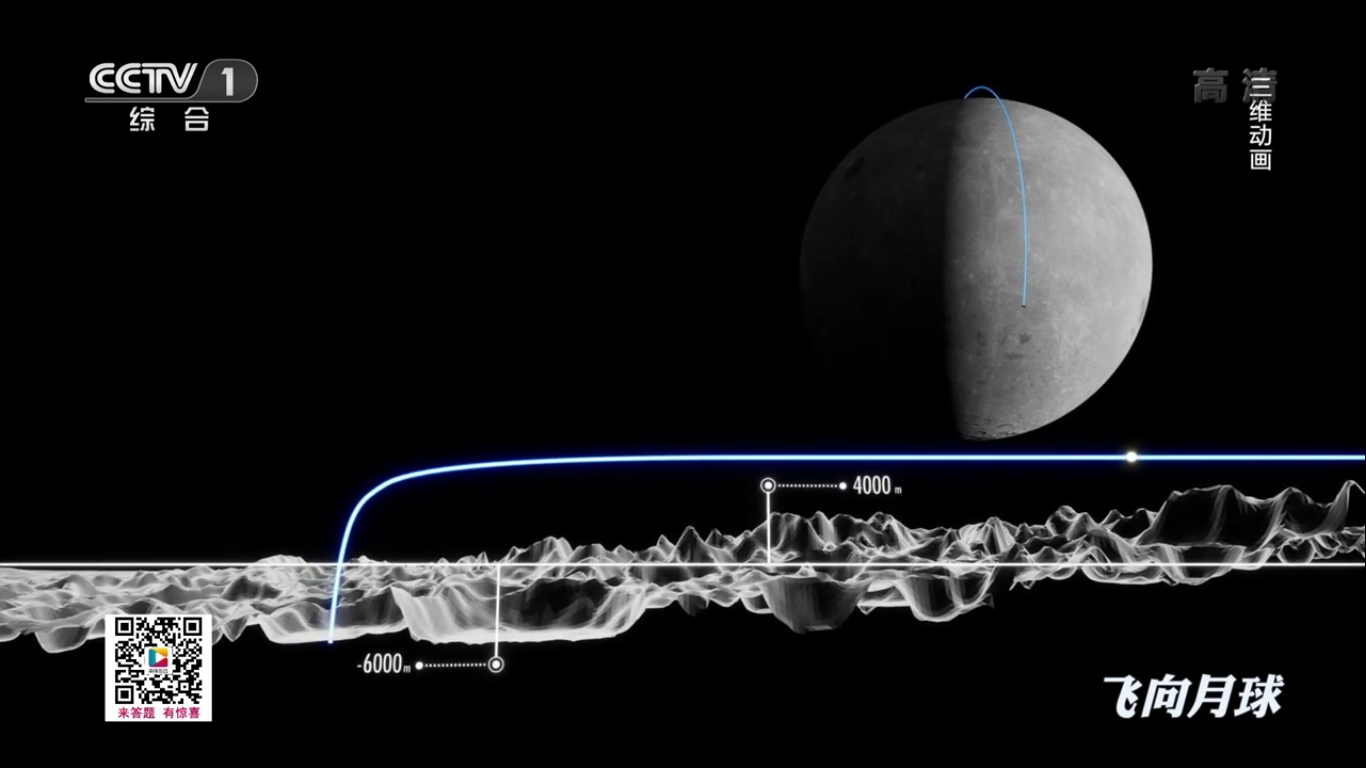
月の裏側での着陸手順のビデオ:
成功した着陸手順のすべての段階を完了し、Chang'e-4デバイス(着陸モジュールとローバー)との独立した通信チャネルをインストールした後、月の裏側の探査の時代が始まりました。
ローバー「Yutu-2」の降下のビデオ:
ローバー旅行「Yutu-2」のビデオ:
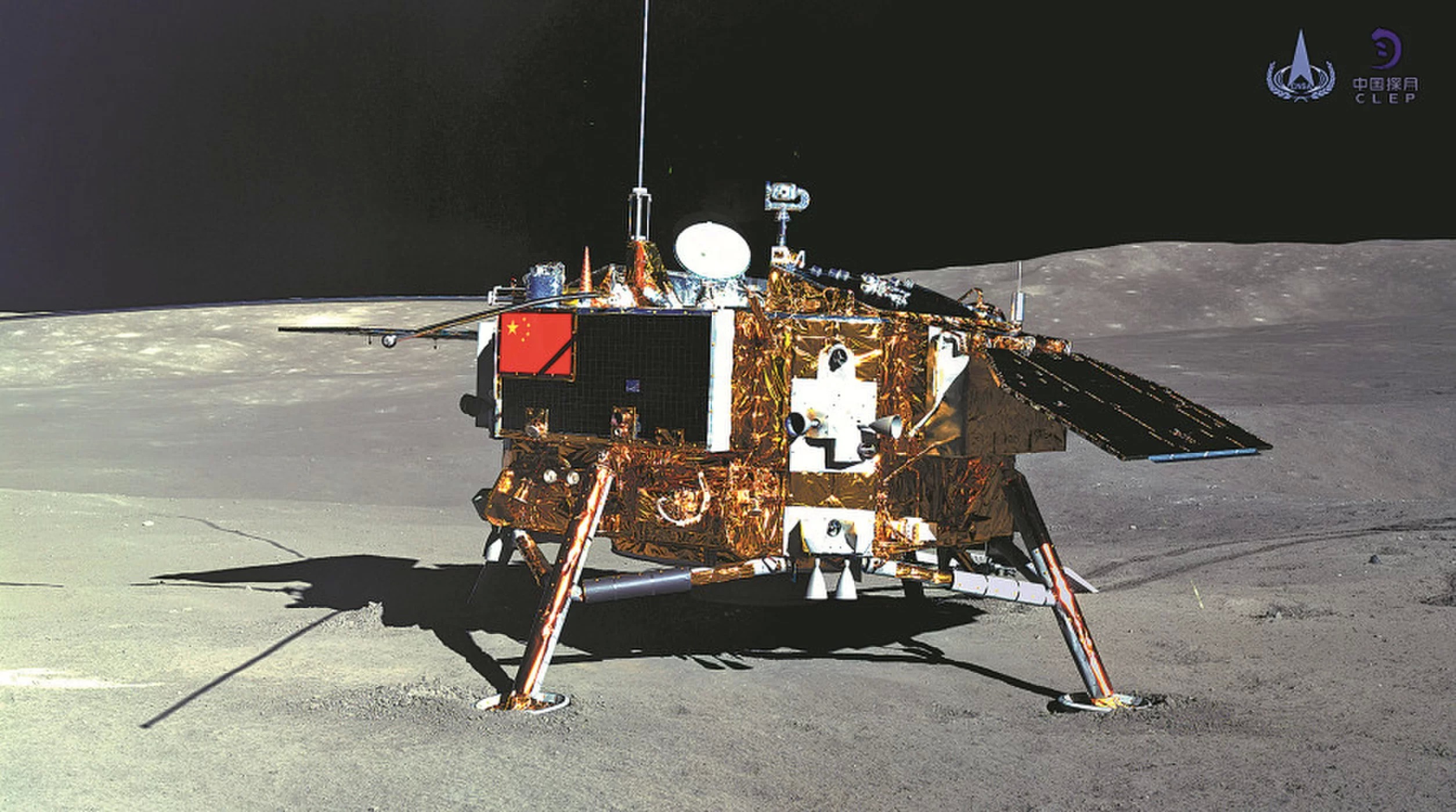
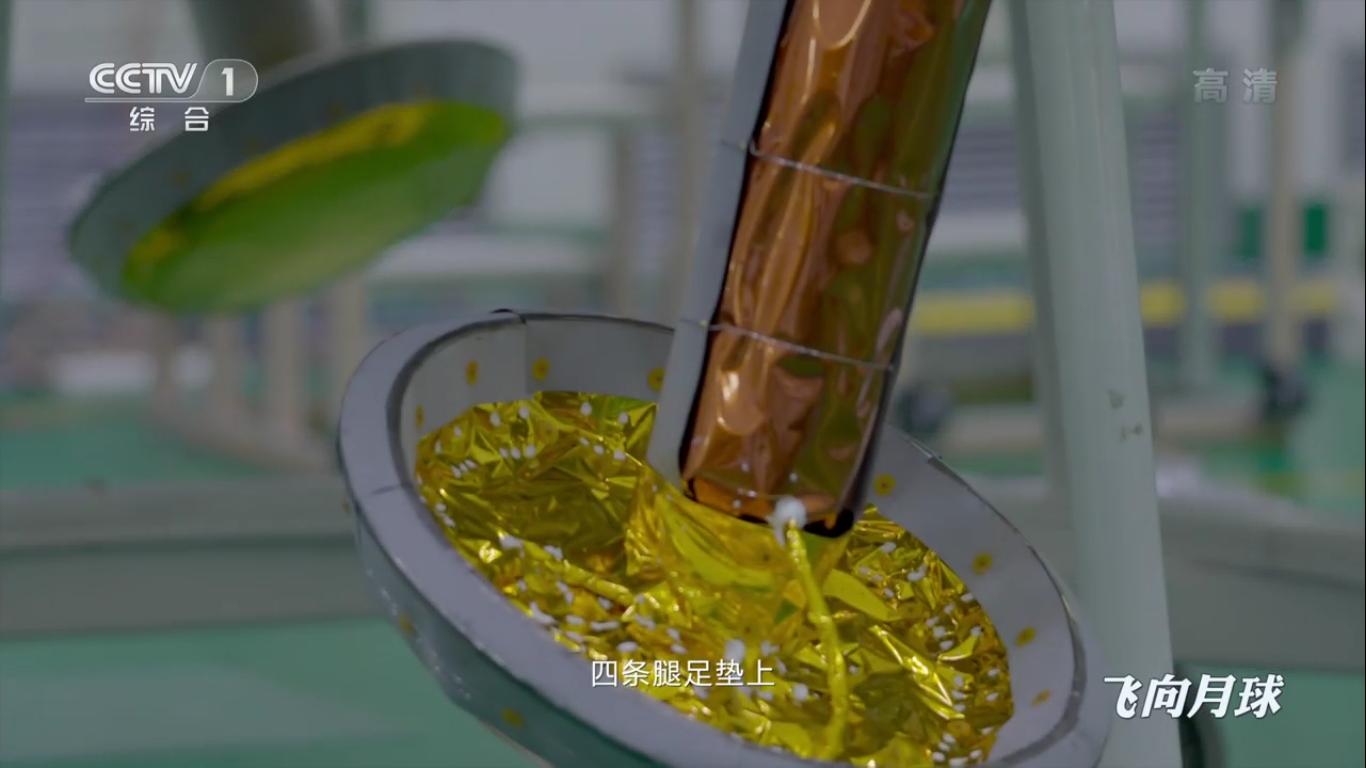
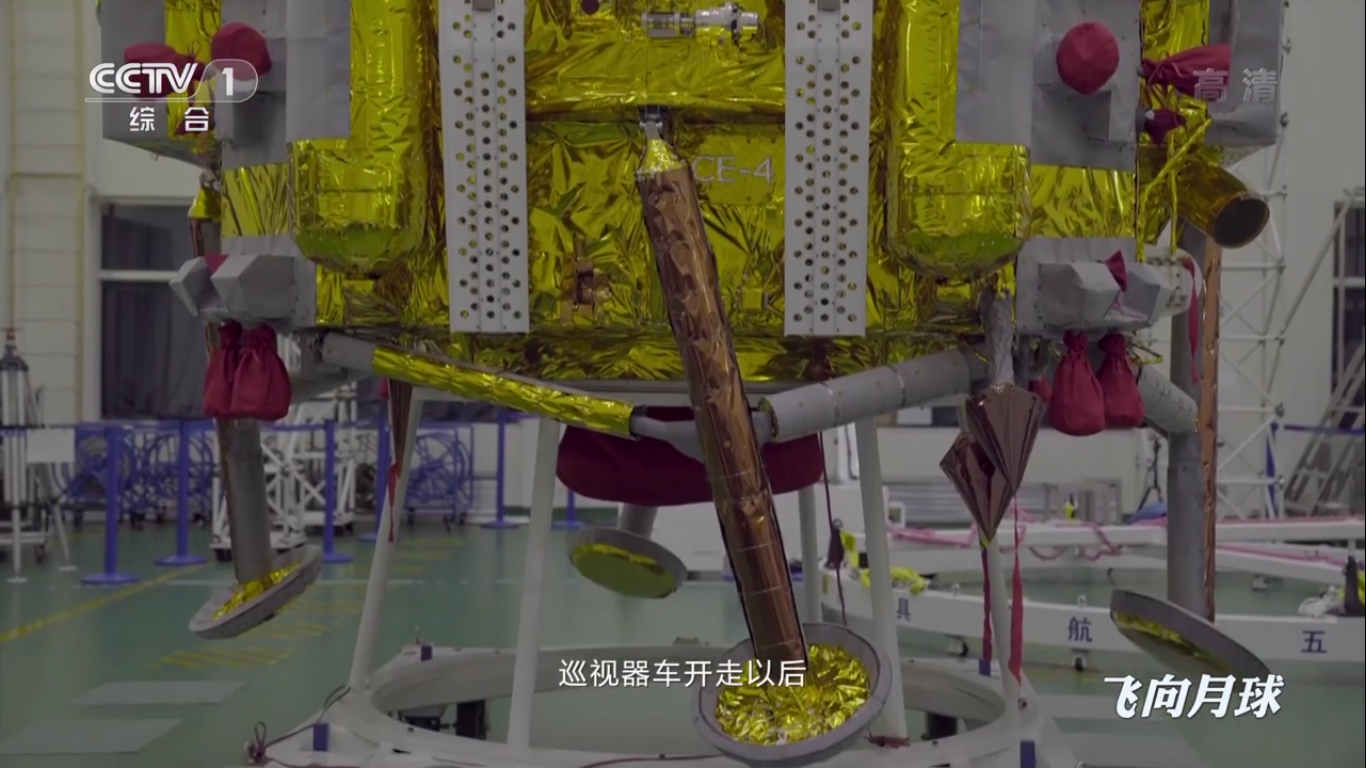
Chang'e-4降下モジュール:
- 対向する着陸サポート間の4.4メートル、重量1200 kg。
- 作業期間:1地球年。
インストール済みの機器:
- LFS-低周波分光計;
- LND-月着陸船の中性子と線量測定(中性子線量計);
- TCAM-地形カメラ(風景カメラ);
- LCAM-着陸カメラ(着陸カメラ)。
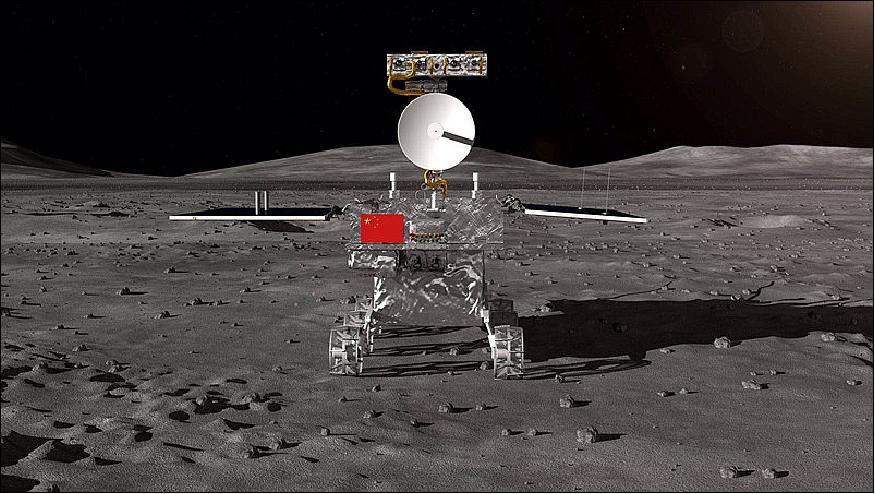
ローバー「Yutu-2」:
- 高さ1メートル、幅1メートル(ソーラーパネルなし)、長さ1.5メートル、折りたたみ式ソーラーパネル2つ、ホイール6つ。
- ローバーの総重量は約140 kg(310ポンド)です。
- 積載量約20 kg(44ポンド);
- 斜面を移動でき、他のオブジェクトとの衝突を防ぐ自動センサーを備えています。
- ローバーには2つのソーラーパネルを使用して電力が供給されるため、ローバーは月の日中に動作します。
- 毎時200メートルの最大速度(月面のこの速度には到達できません。表面の要素がローバーを早く加速したり無効にしたりできないためです)。
- 最大の研究エリアは3平方メートルです。 km;
- 推定稼働時間は3か月(2160時間)であり、ローバーはすでに耐用年数を超えています。
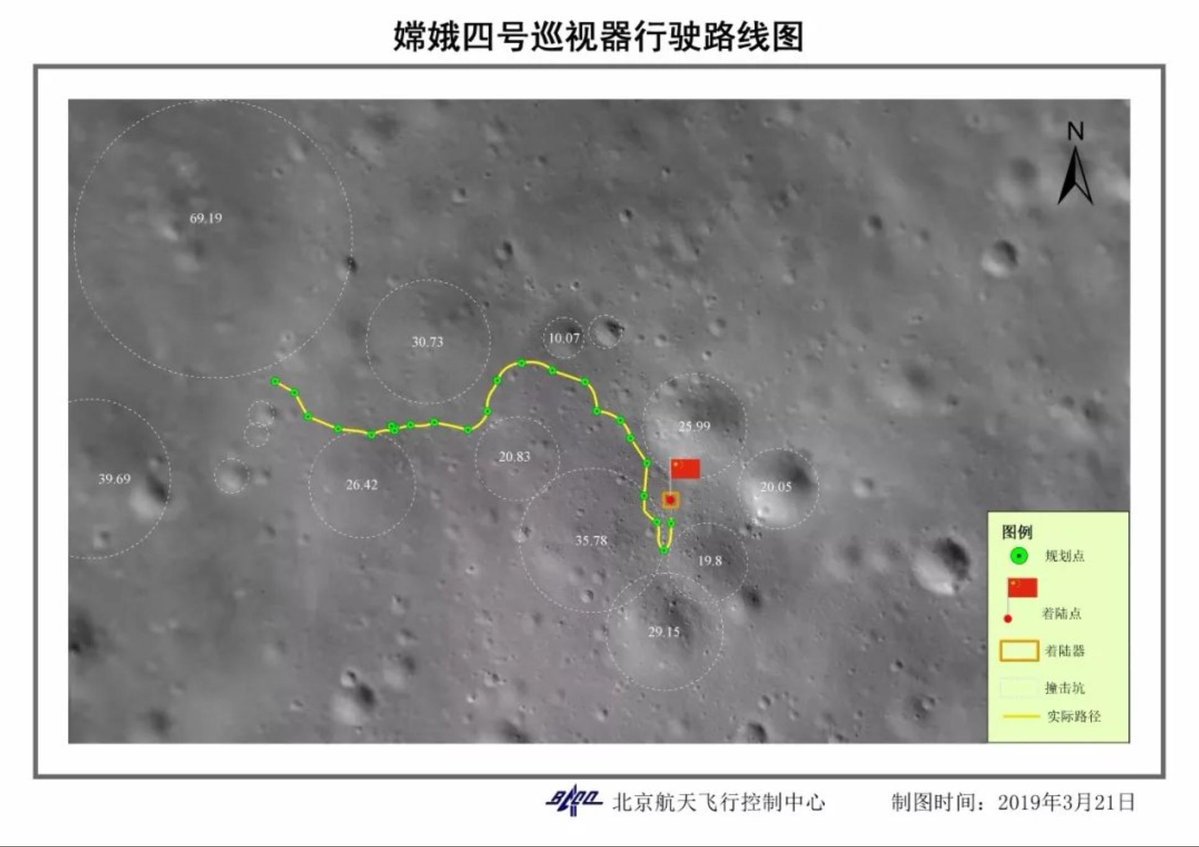
- 最大推定距離は10 kmで、178.9メートルが5か月で月面に沿って通過しました(月の向こう側にあるローバーの1位、すべての月面ローバーの6位)。 ここにローバーの距離の表があります 。
- 制御モード:自動(小さな障害物の迂回)、手動(メイン)-オペレーターは地球から制御します。
インストール済みの機器:
- LPR-月面貫通レーダー;
- ASAN-ニュートラル用の高度な小型アナライザー(中性粒子の小型アナライザー);
- VNIS-可視および近赤外イメージング分光計(赤外線分光計);
- PCAM-パノラマカメラ(デュアルパノラマカメラ)。
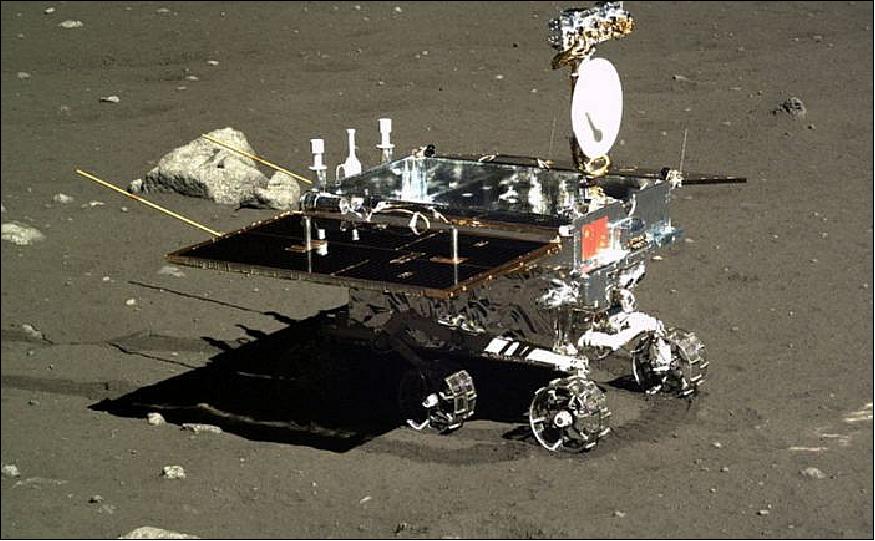
地球上の写真ローバー:

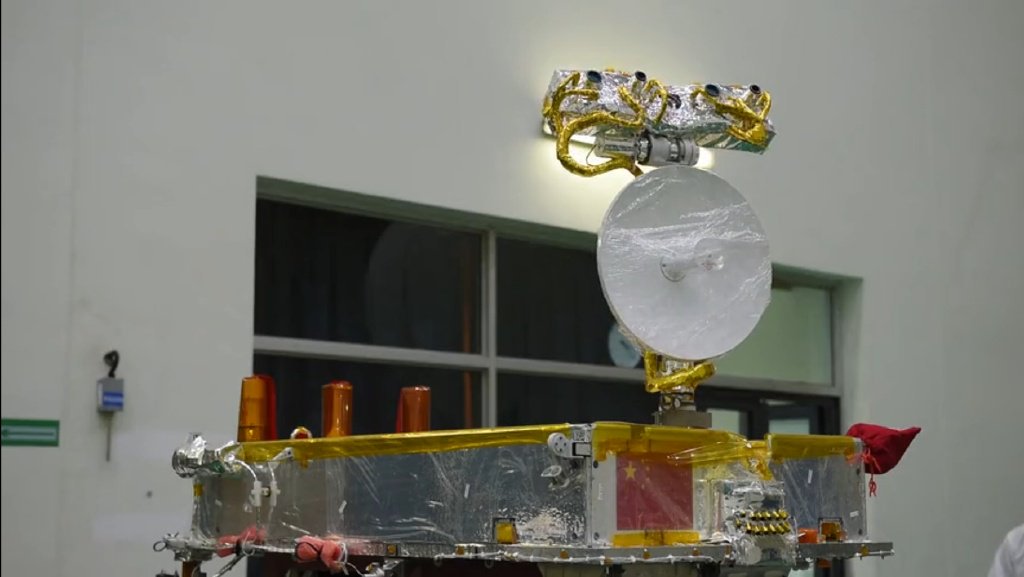


2018年5月21日に打ち上げられたTseyuqiao衛星リレー(フォーティースブリッジ)は、特別な重力安定ラグランジュポイントEarth-Moon L2の周りのハロー軌道で動作し、そこからいつでも地球と月の裏側からの直接の視認性を維持できますMCCとChang'e-4プロジェクトのモジュール間のデータ交換のため。
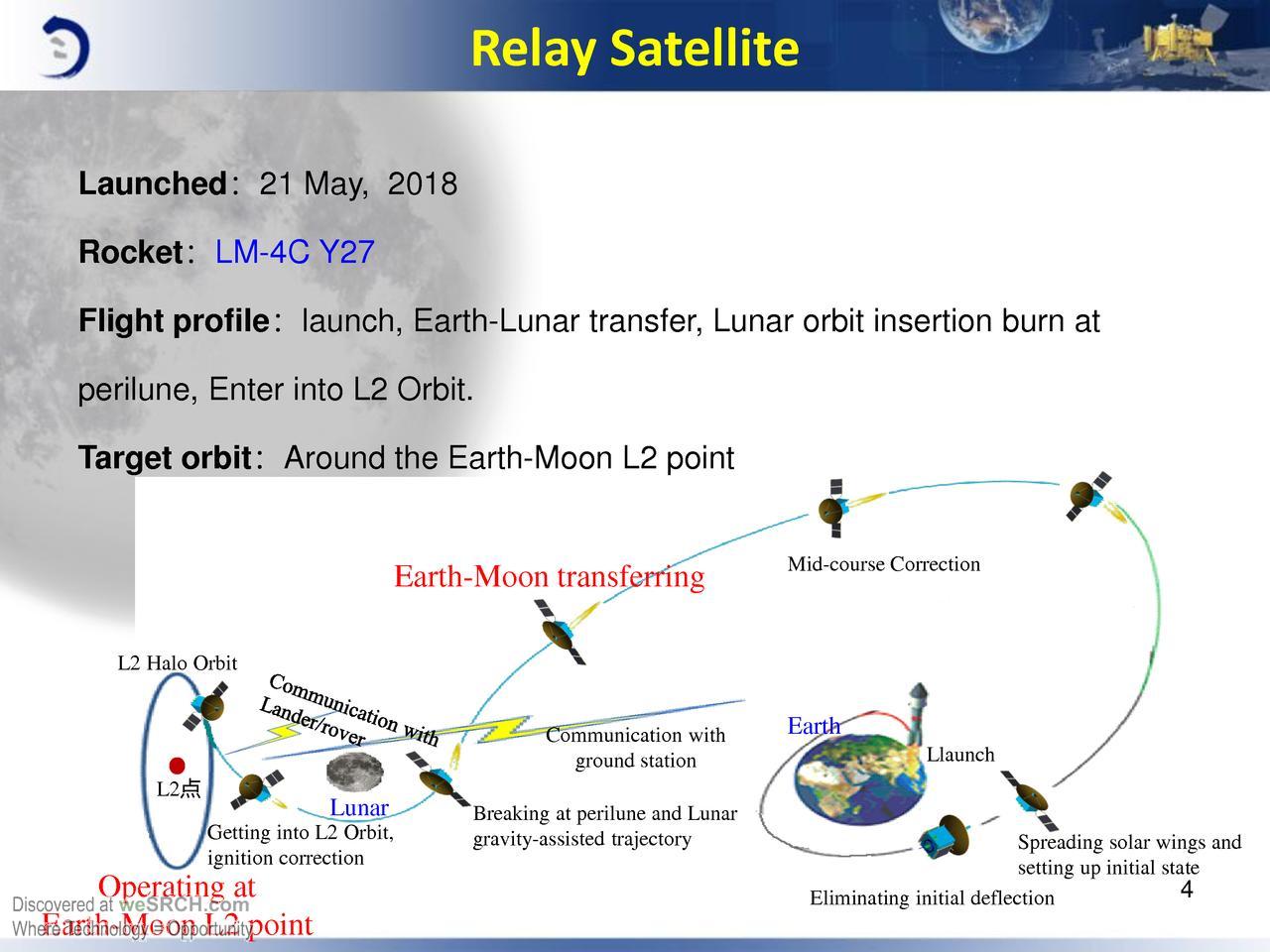
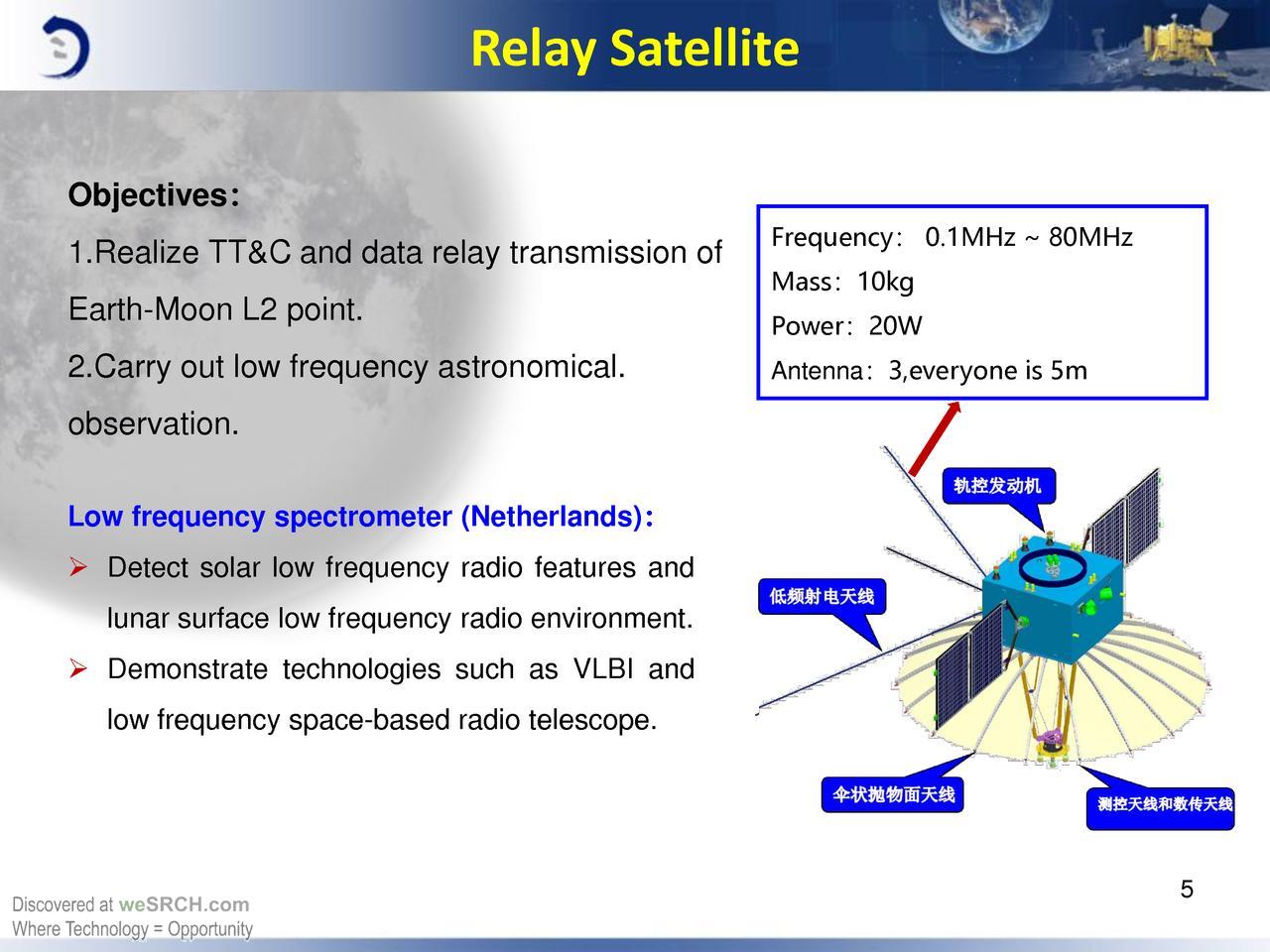
また、3つの5メートルアンテナを備えた低周波分光計(リレーLFS)がTseyuqiao中継衛星に設置され、初期宇宙からの低周波電波放射が記録され、その構造を研究することが可能になります。
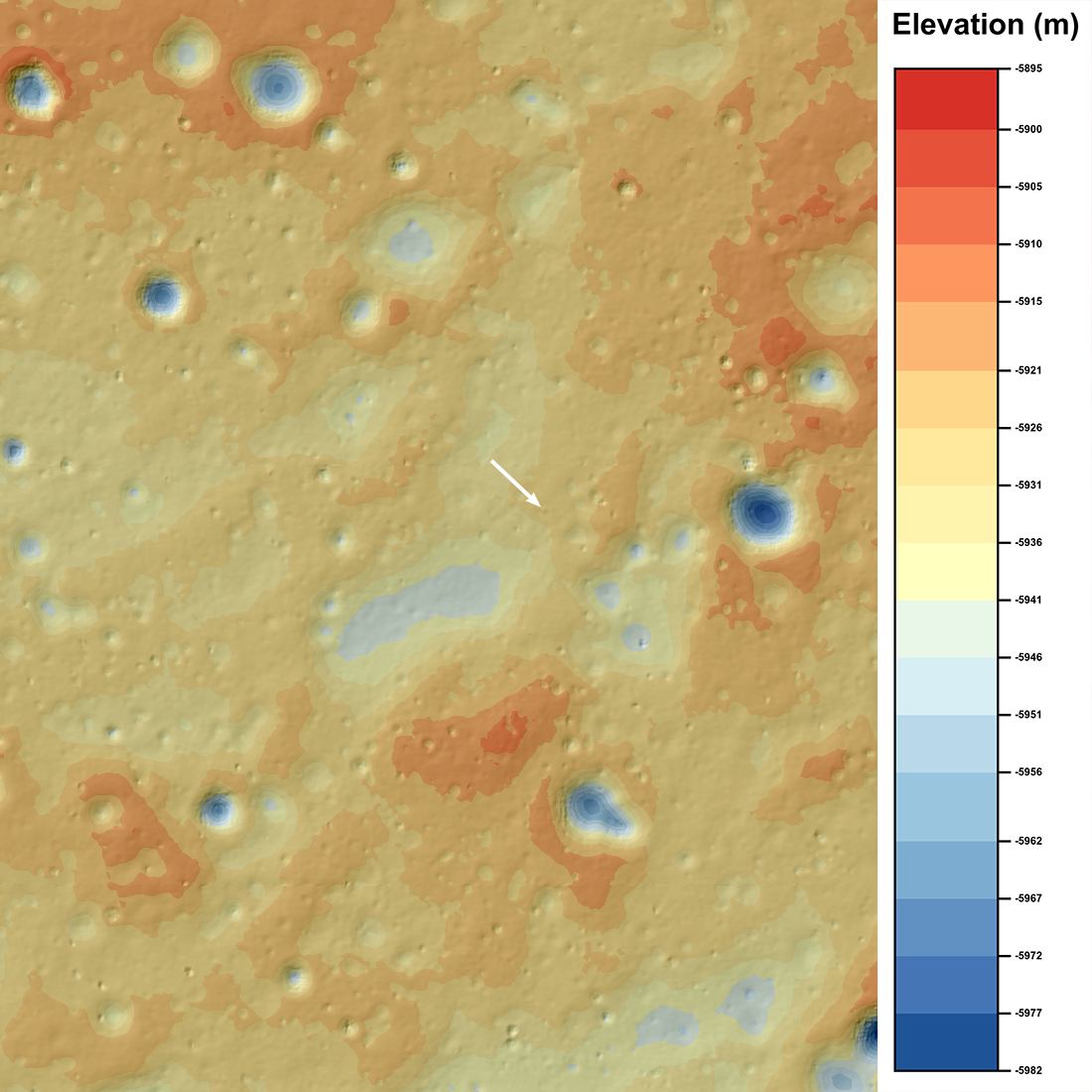
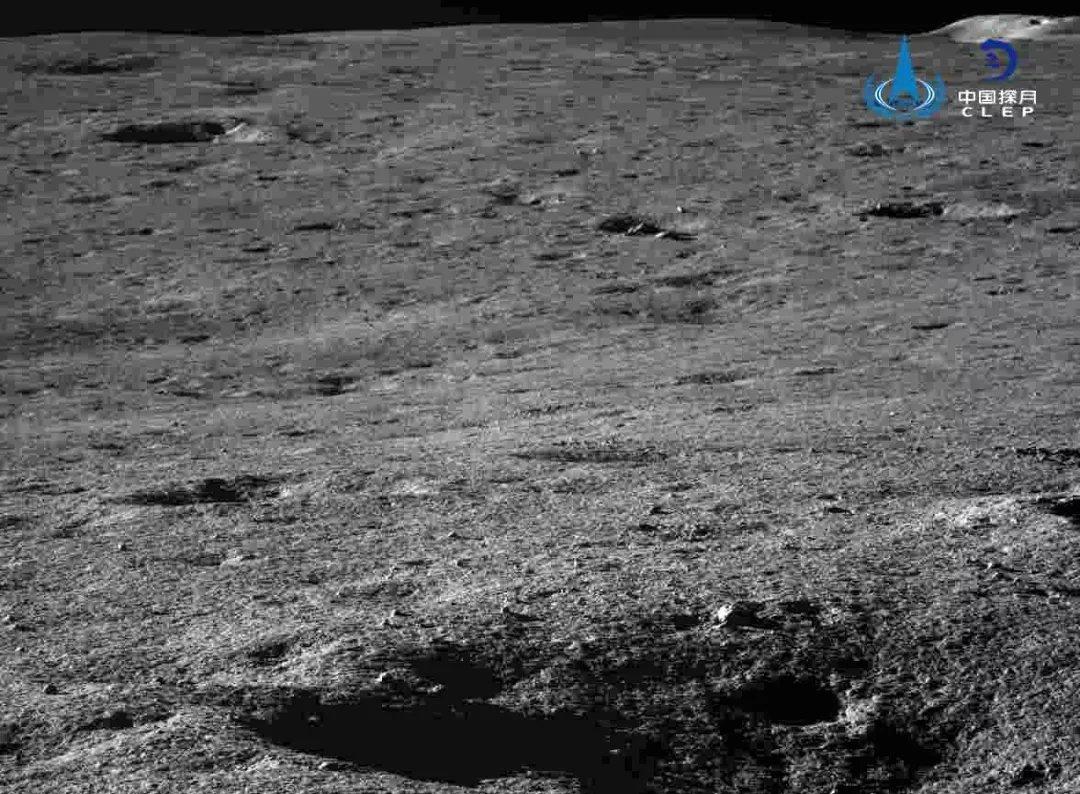
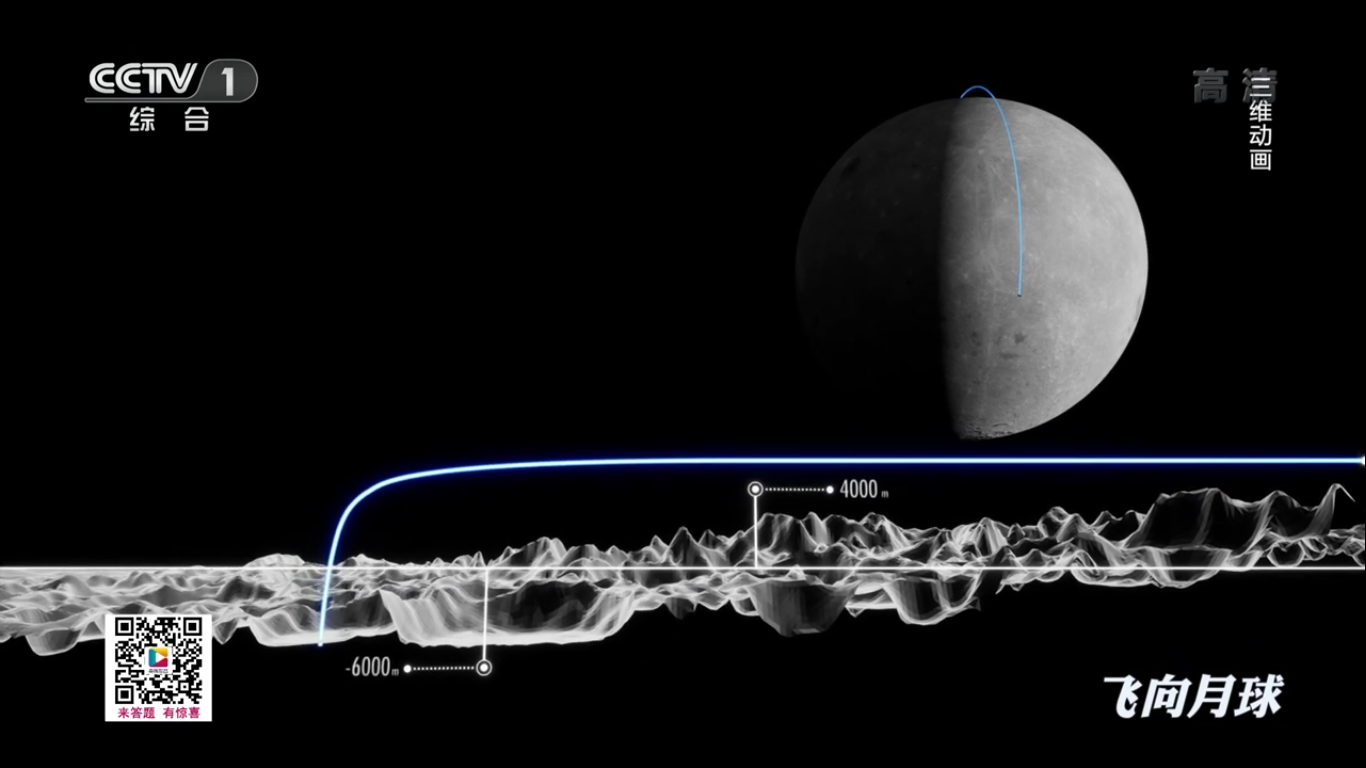
月の裏側は、地球から見える側よりも複雑な起伏があります。 Chang'e-4着陸モジュールの着陸ゾーンの月面には、しわ、多数の小石、小さなクレーターがたくさんあります。
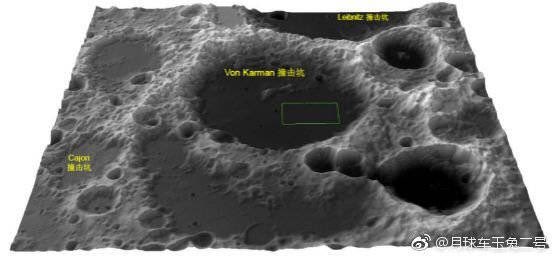
Chang'e-4降下モジュールの月の向こう側のクレーターポケットにある着陸帯の地形写真(LROプローブ、NASA製):
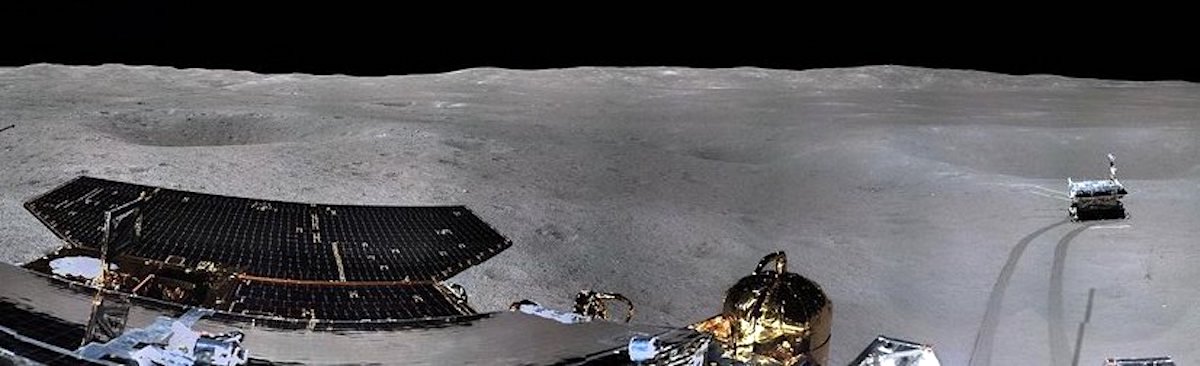
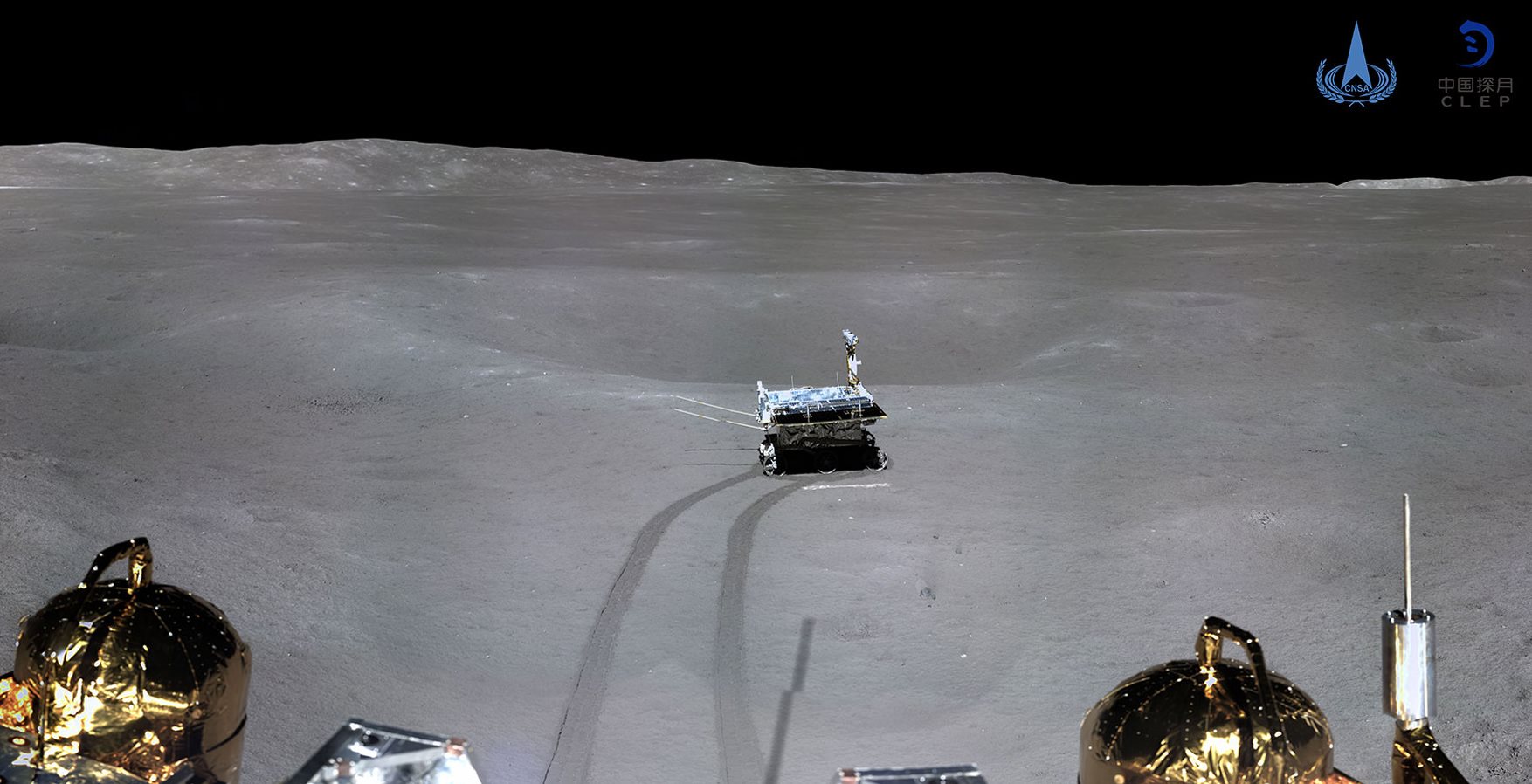
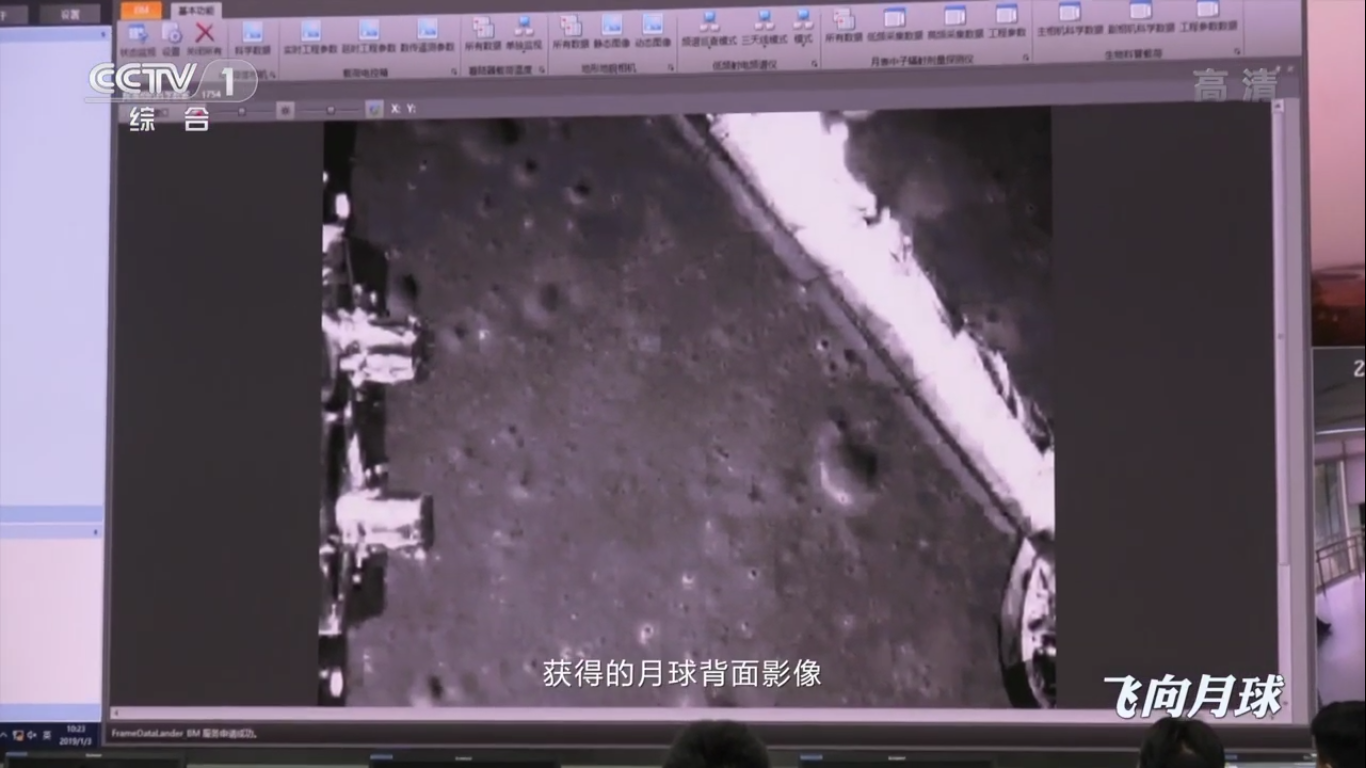
Chang'e-4着陸モジュールとYutu-2ローバーのカメラからの月面の新しい写真。
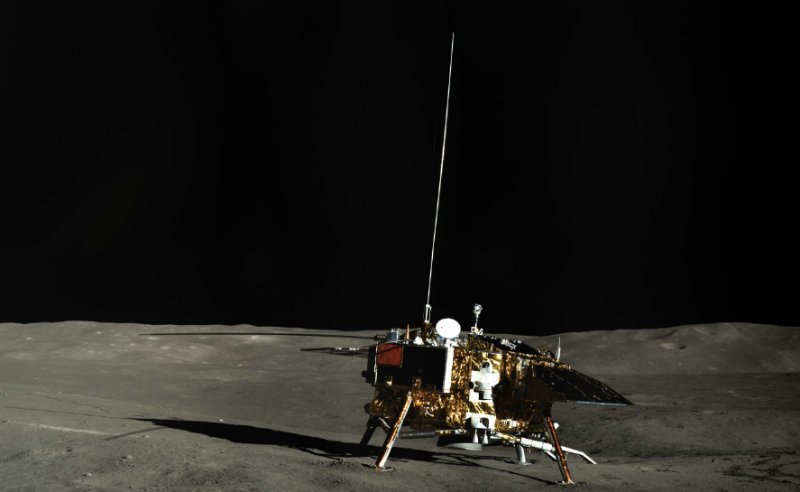
非常に孤独な着陸モジュール「Chang'e-4」:

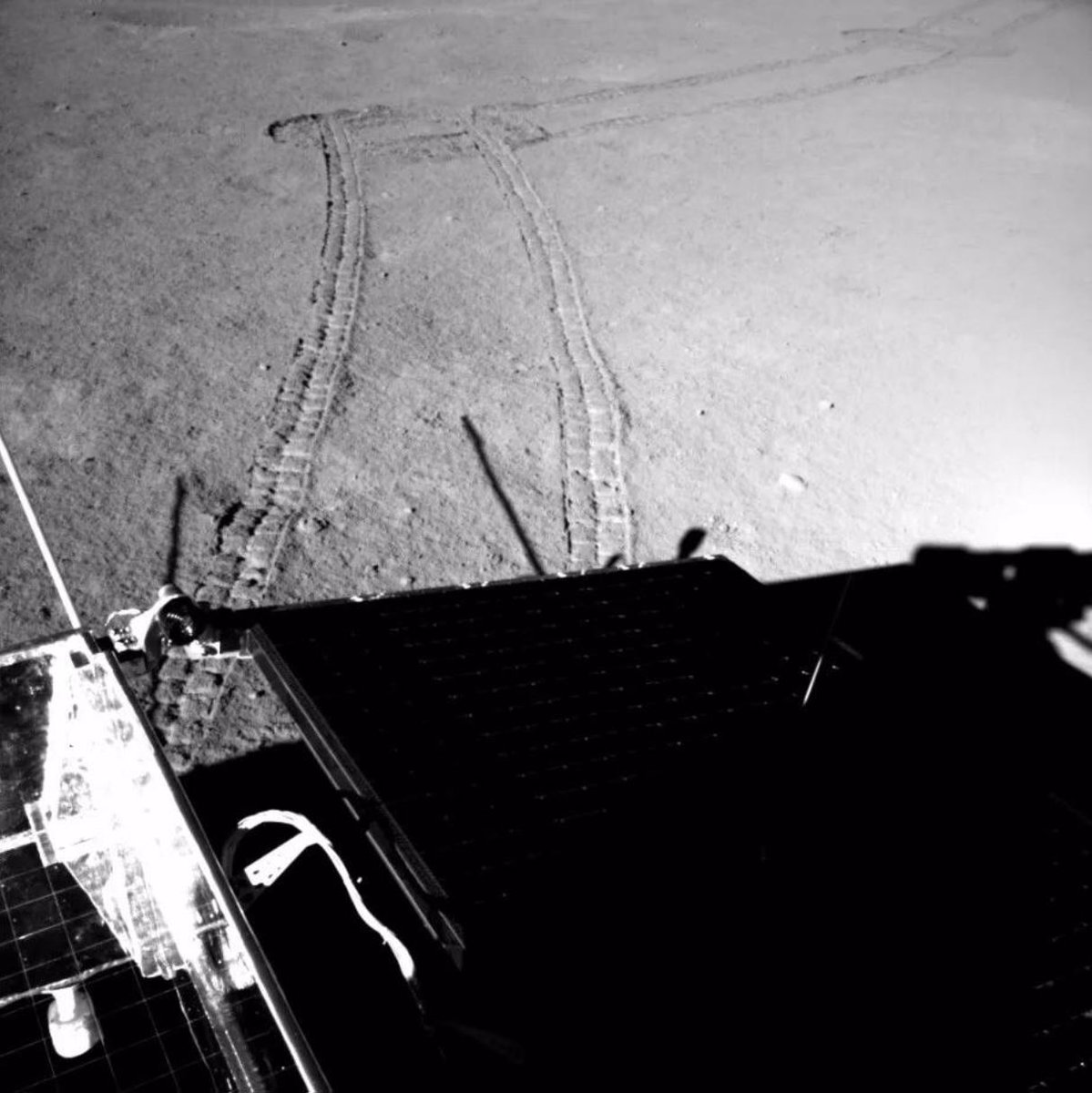
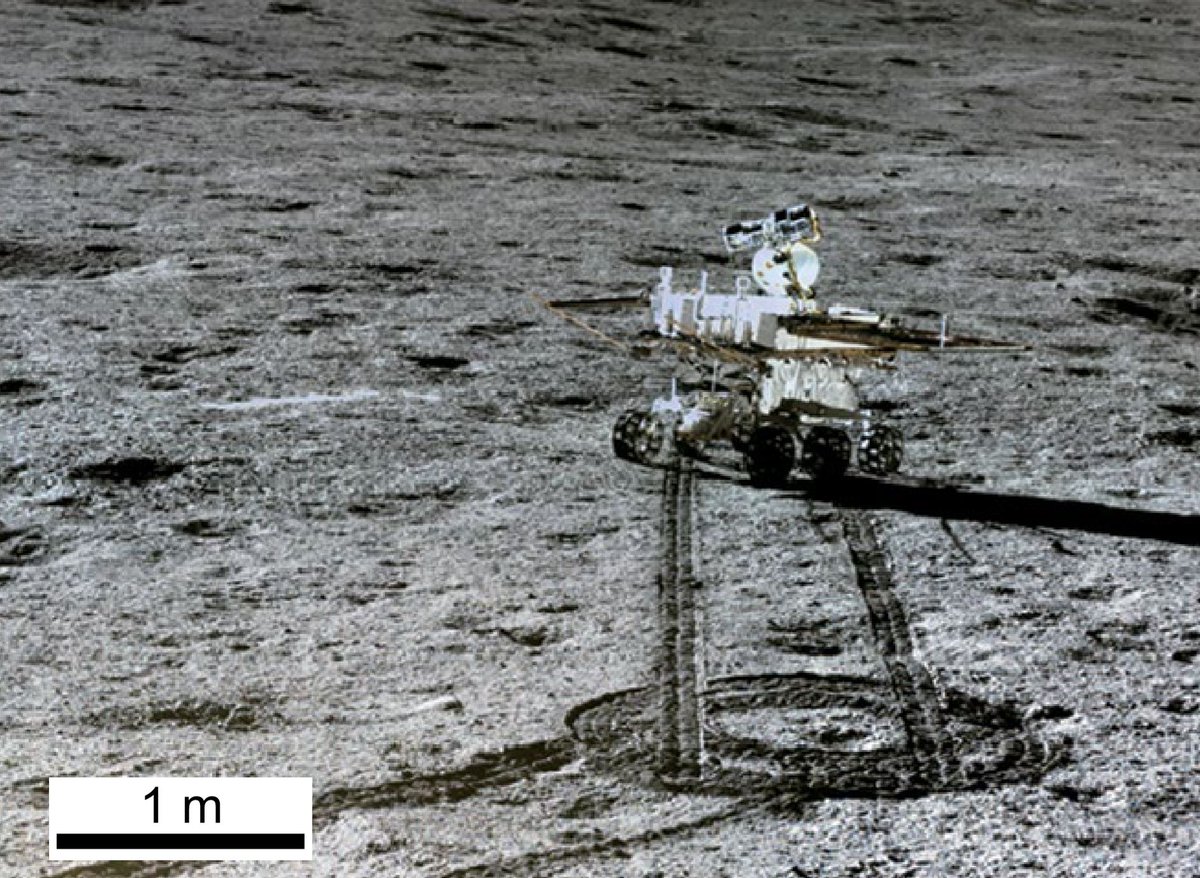
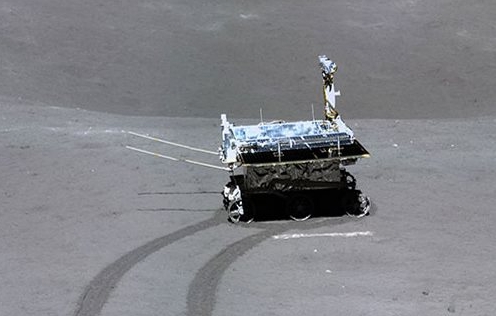
Yutu-2ローバーの痕跡:

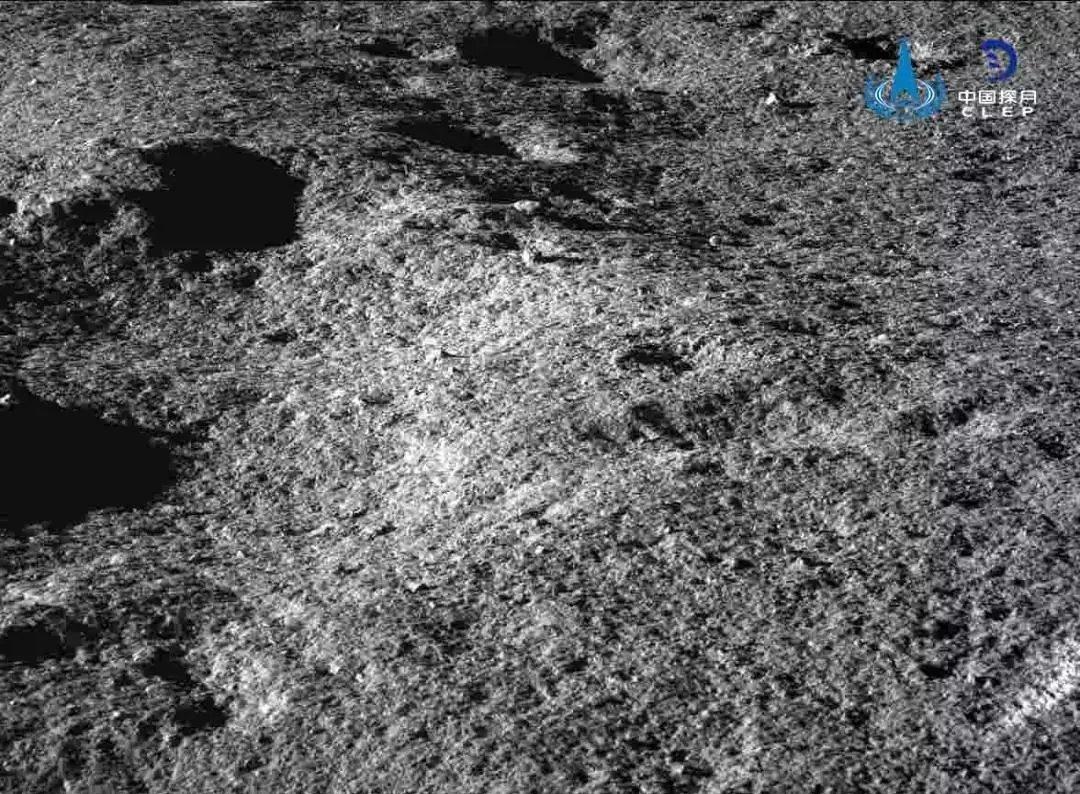
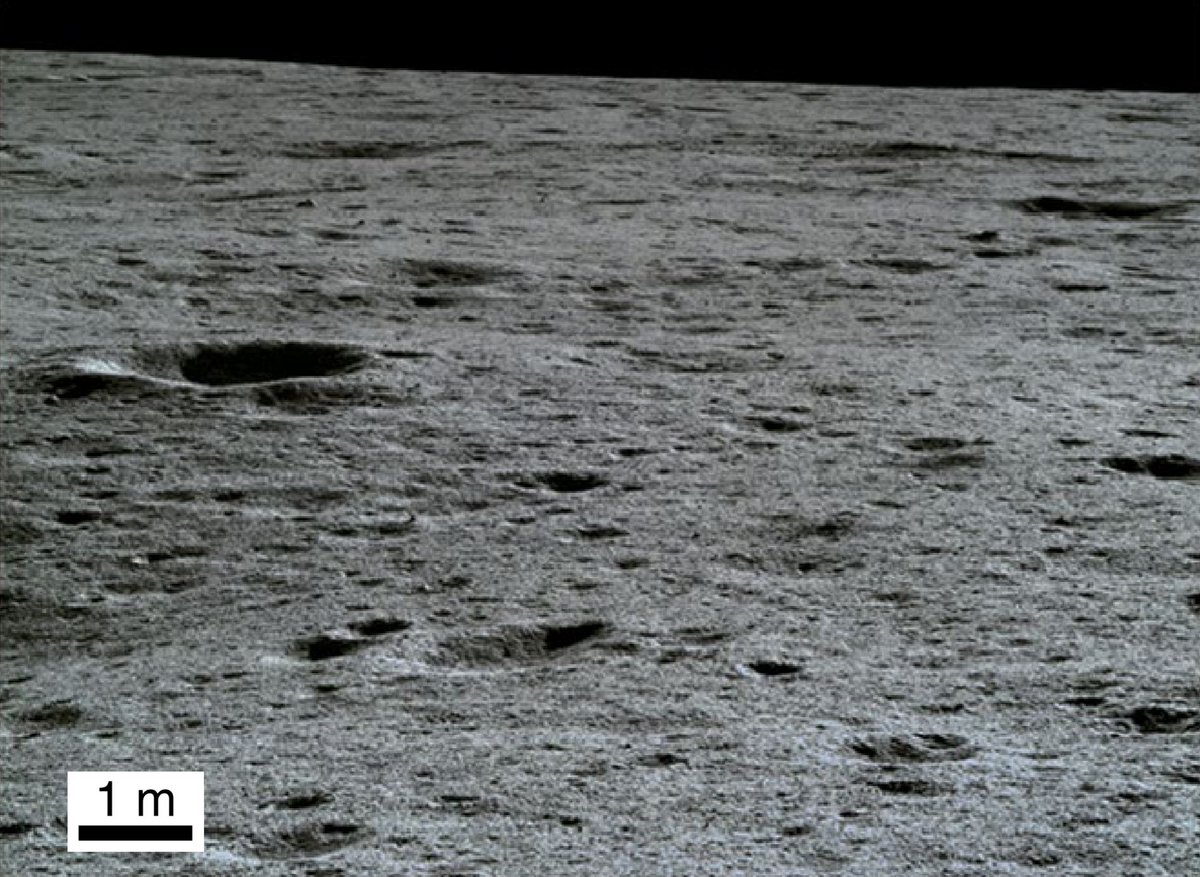
月の裏の表面:




以前に月の裏の表面の写真を地球に送った:
Yutu-2ローバーの車輪からの月の軌跡と、パノラマカメラ付きのアンテナとプラットフォームからの影:

いくつかのクレーター(美しい影)と背景の山:

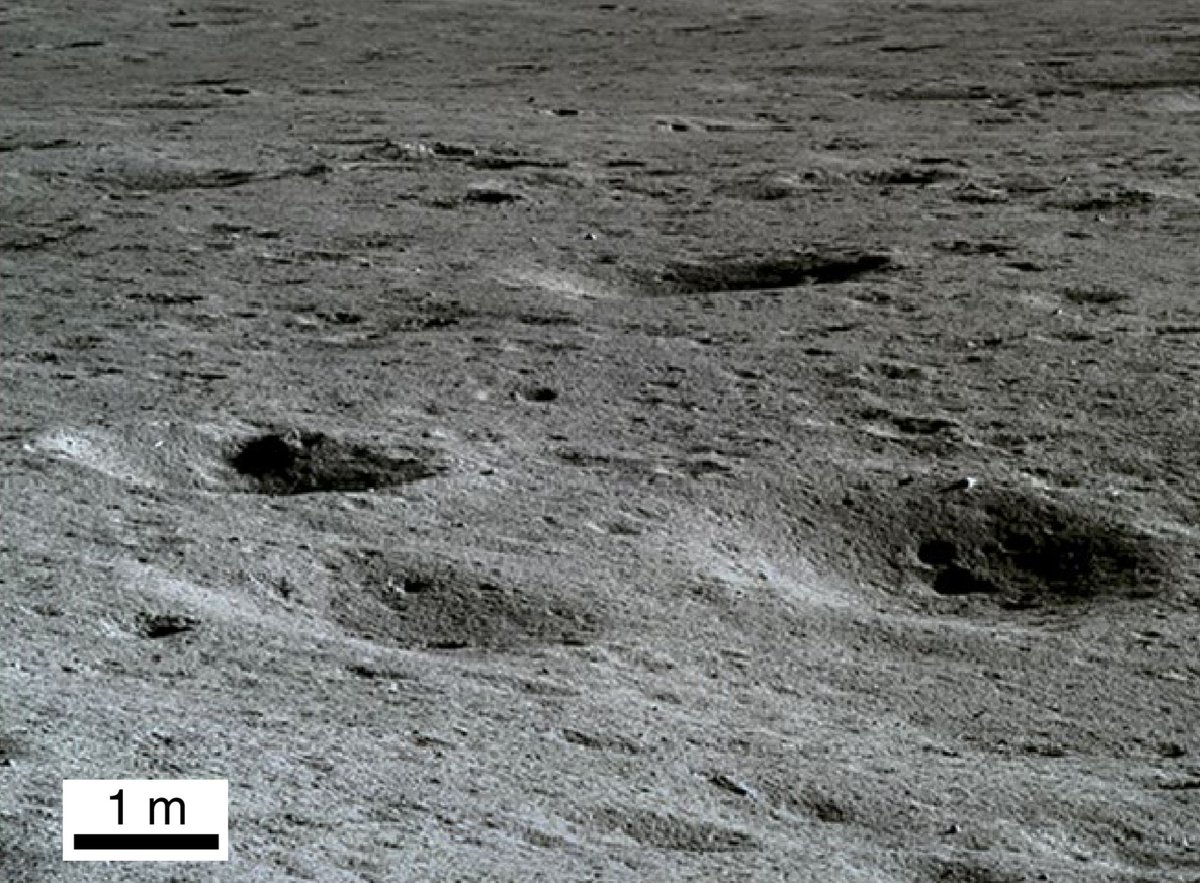
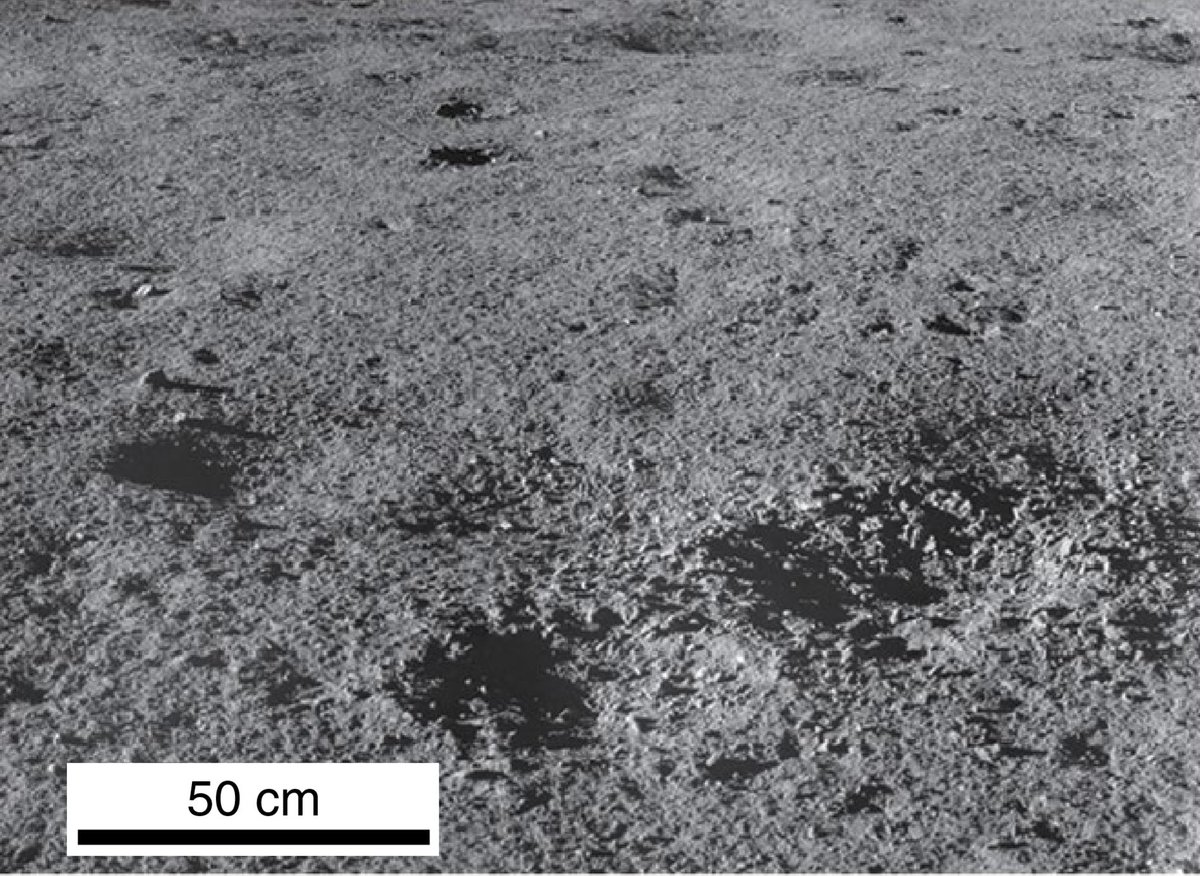
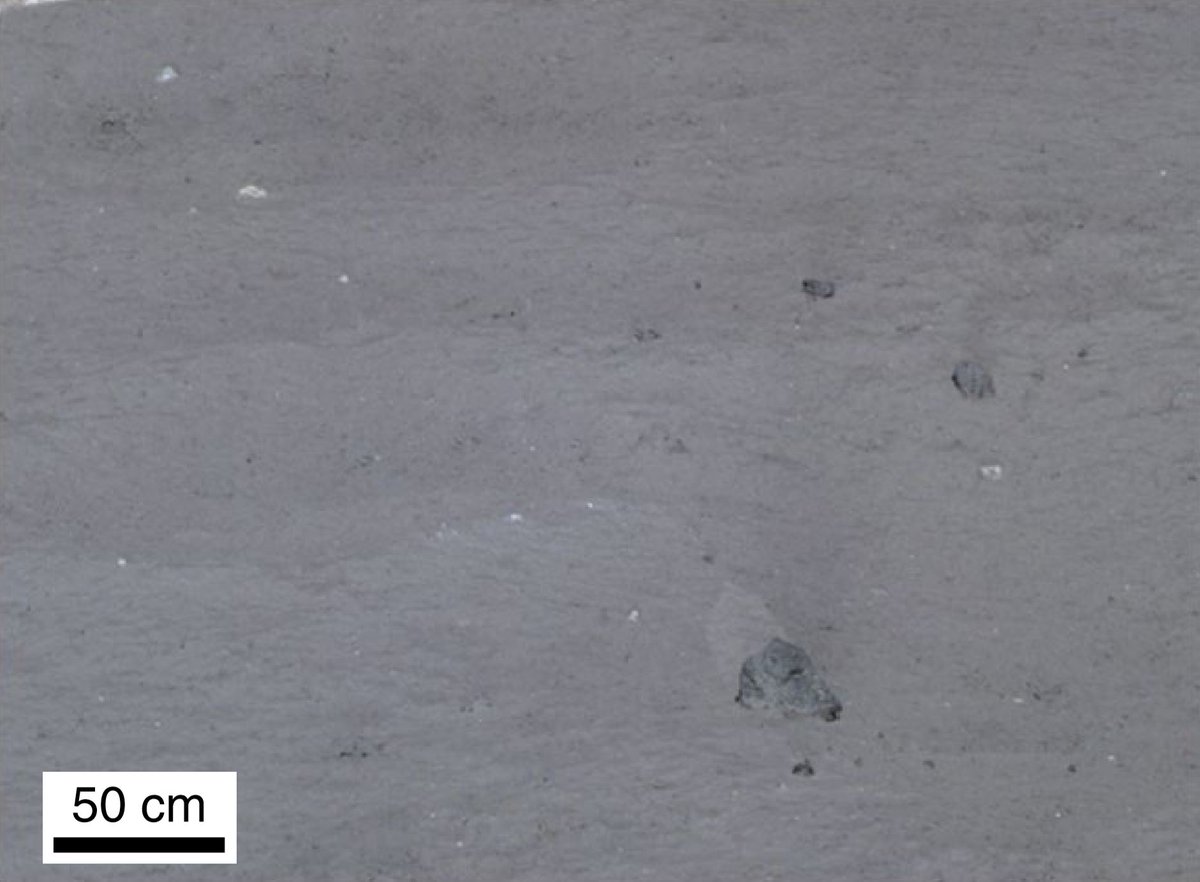
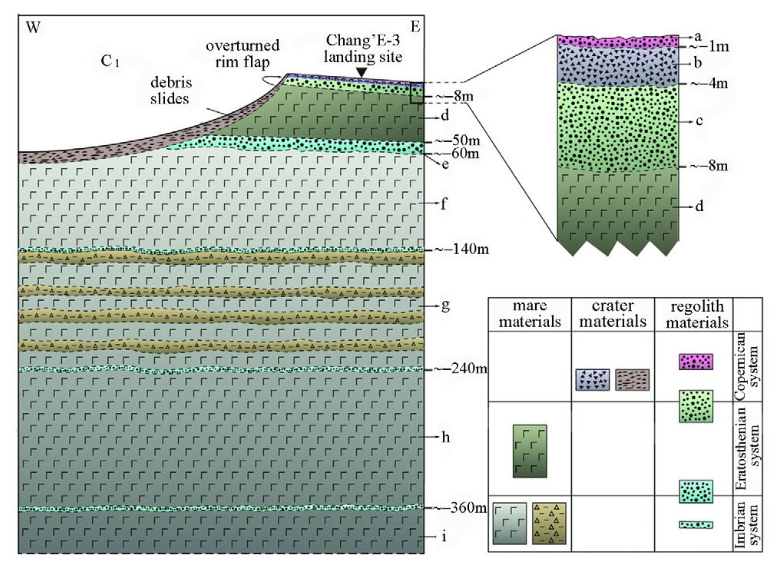
そしてこれらは、Nature Geoscienceの4月号の科学記事「Chang'e-4によって探検される月の向こう側」からの写真です。

着陸地点近くの小さなクレーター:
ローバー「Yutu-2」は月の表面を探索します。
小さなクレーターの石の破片(Yutu-2ローバーからの写真):
Yutu-2ローバーに沿った小さな石:

着陸地点近くの非常に珍しい暗い石:
カメラデバイスからの写真:
着陸カメラLCAM:







地形カメラTCAM:







パノラマカメラPCAM(ローバー):



Chang'e-4プロジェクトの歴史の新しい瞬間
2018年12月8日:ペイロードを備えたChangzheng-3Bロケット(Chang'e-4ステーション)が、中国のSichan宇宙港から打ち上げられました。
Changzheng-3Bロケットの打ち上げ:



カウントダウン終了:






ペイロード部:

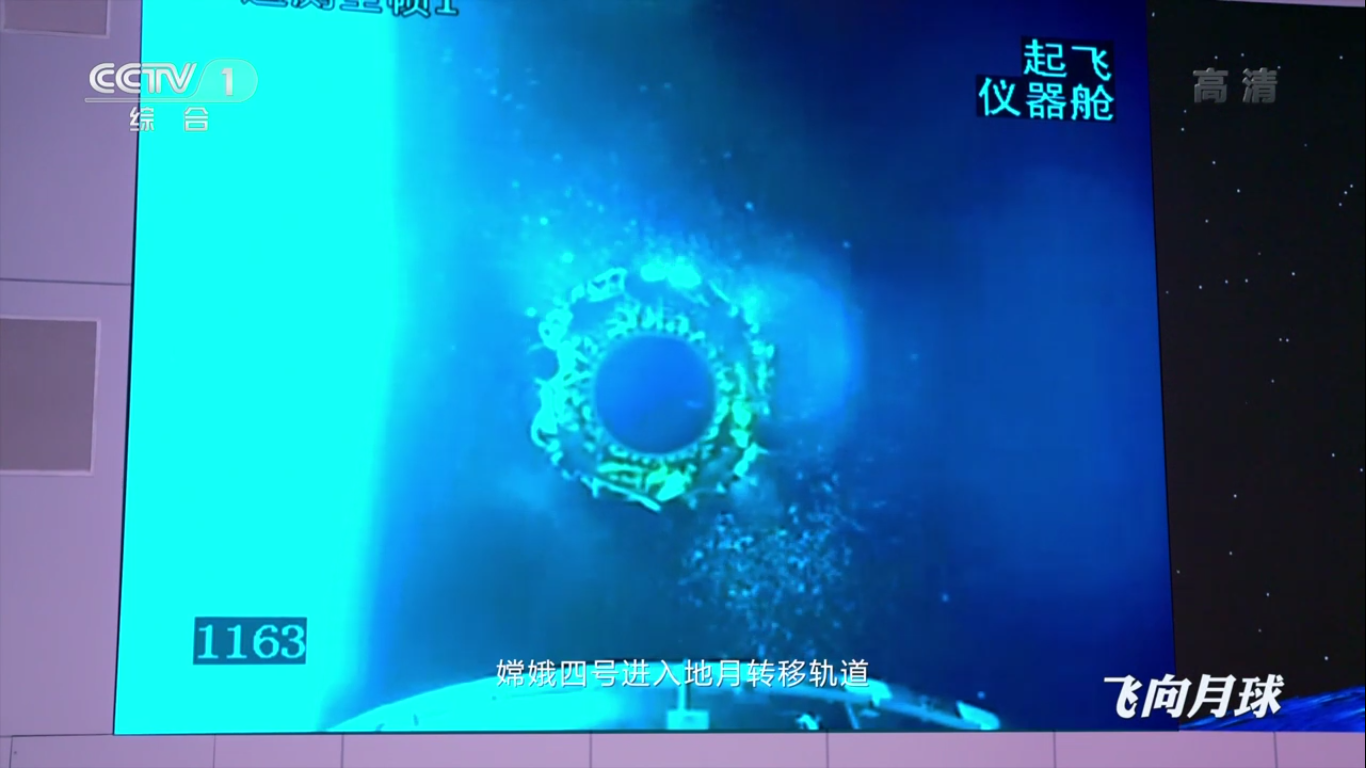
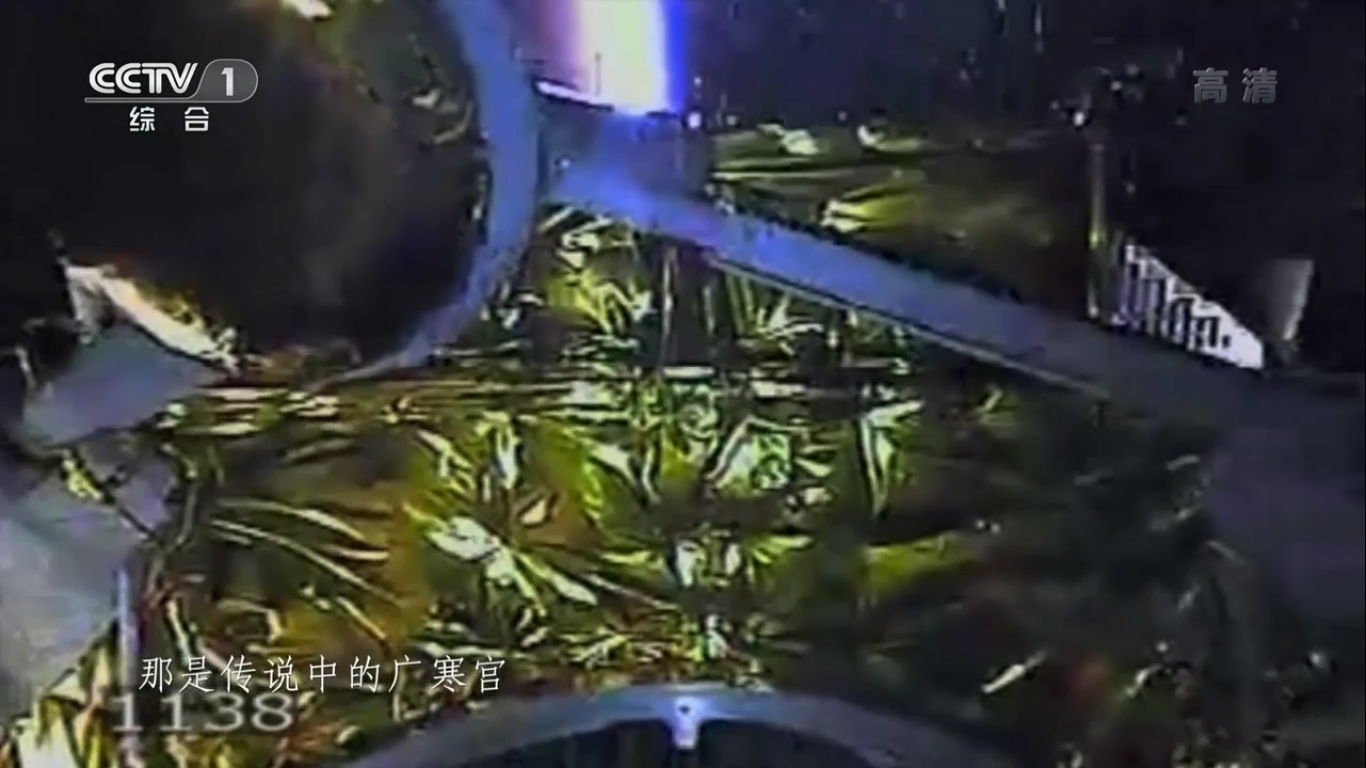
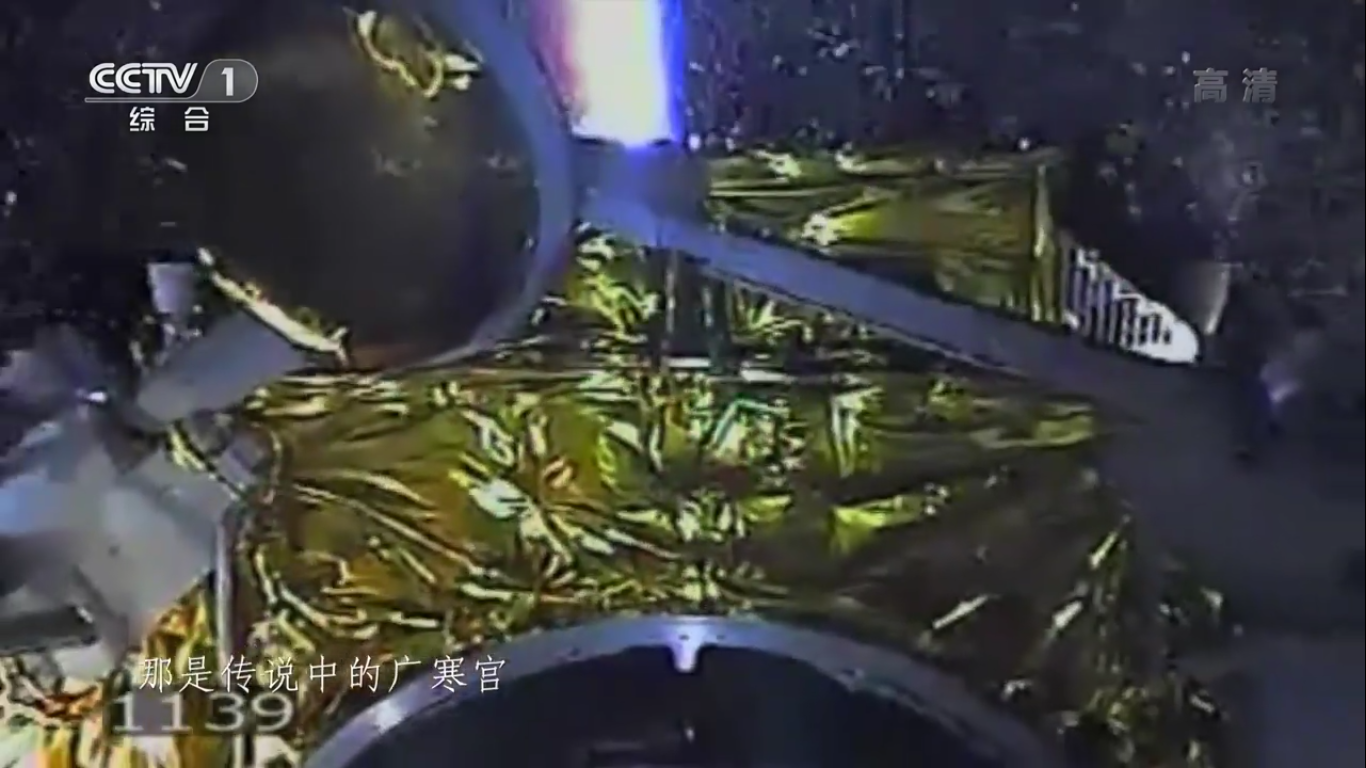
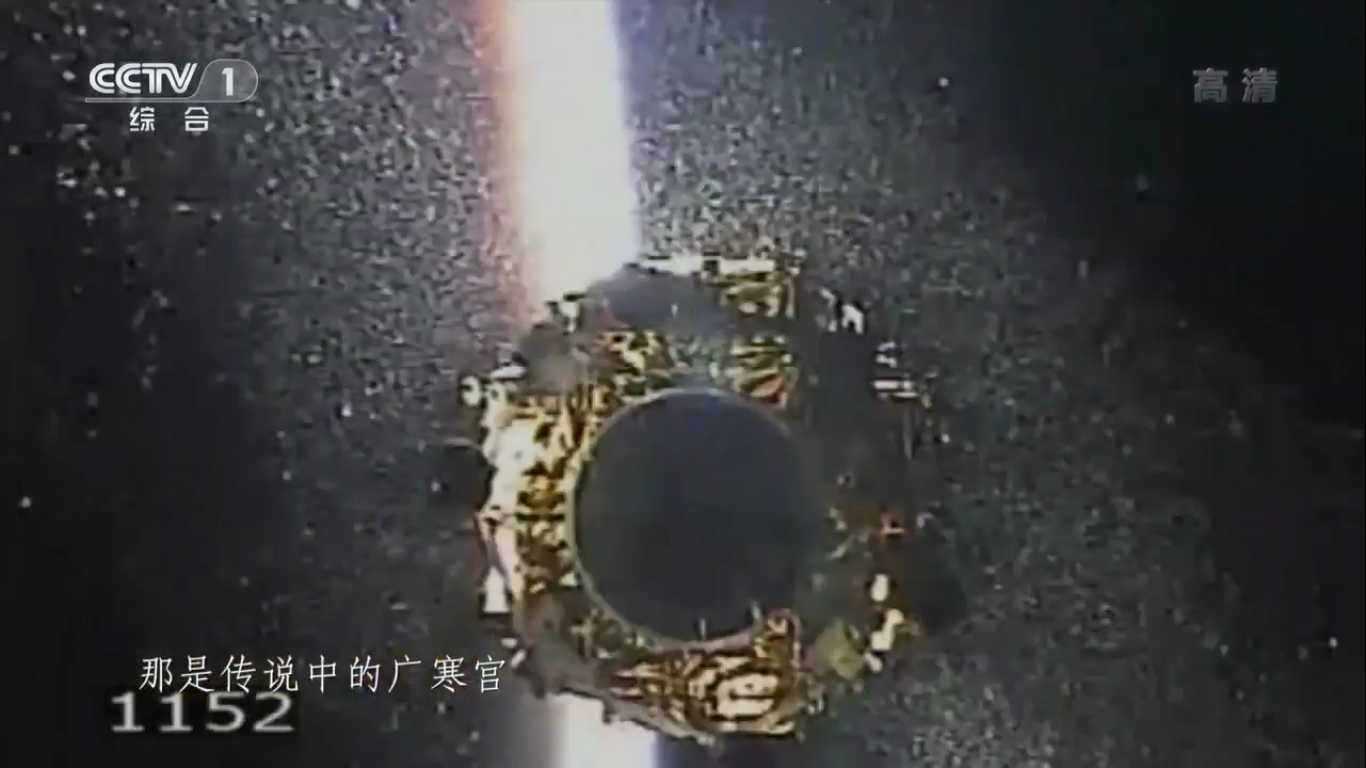

すでに宇宙空間にあるペイロードの位置決め:

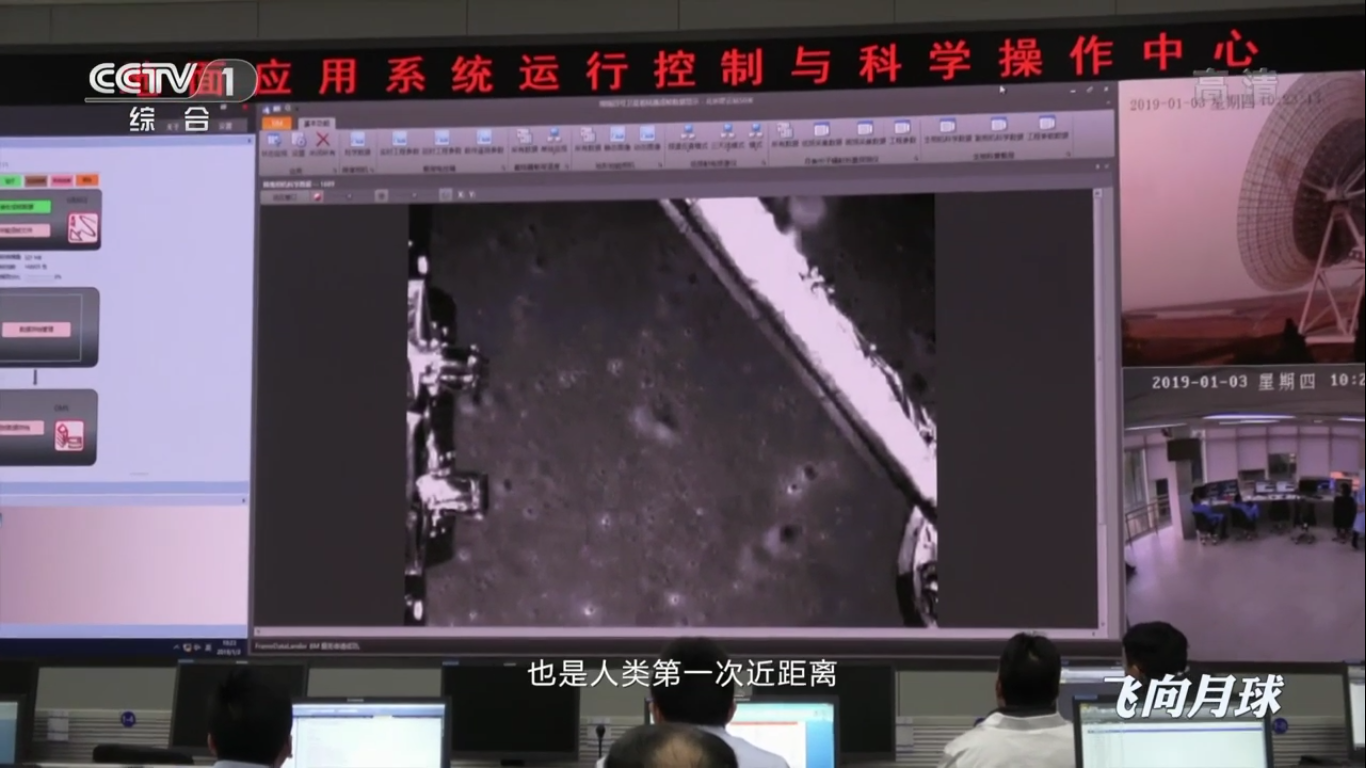
2019年1月3日:Chang'e-4着陸船が月の向こう側のカルマンクレーターに着陸します。

中国宇宙技術アカデミーの飛行管制センター:



Zhang He-Chang'e-4プロジェクトのエグゼクティブディレクター:

興味深いアイコン:
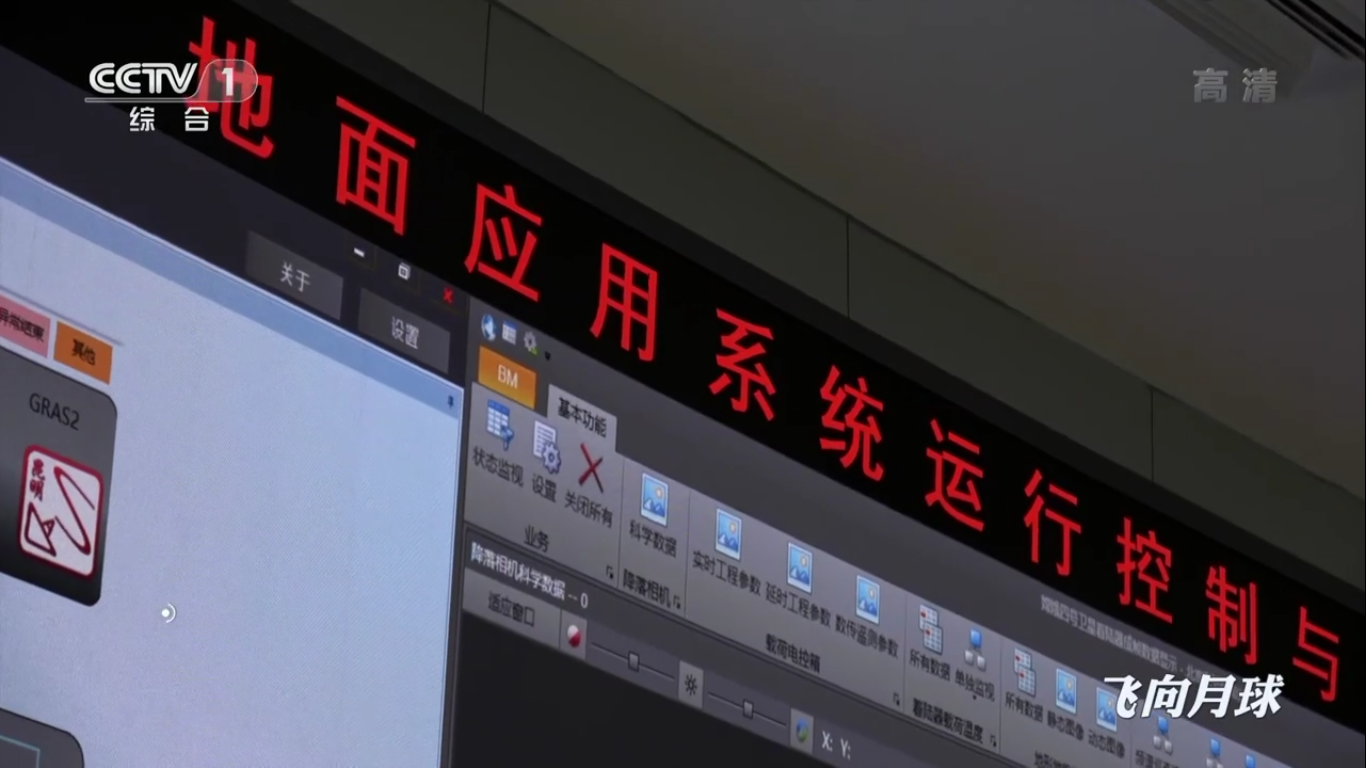




宇宙通信の中心:

着陸の準備:
着陸地点は非常に慎重に「キャッチする必要がある」:




一部のオペレーターにはキーボードがありません。


着陸プロセス:

中継衛星通信:


着陸があります:



ローバーを起動する準備:


Chang'e-4降下モジュールの各着陸サポートには表面タッチセンサーがあり、月の夜に動作し、月の表面のデータを記録する温度センサーもサポートとローバーの発射ランプに組み込まれています。
Chang'e-4モジュールのセンサーによると、夜の月面の温度は(最低)摂氏マイナス190度まで下がりました。




宇宙通信センターでのデータの受信と処理:

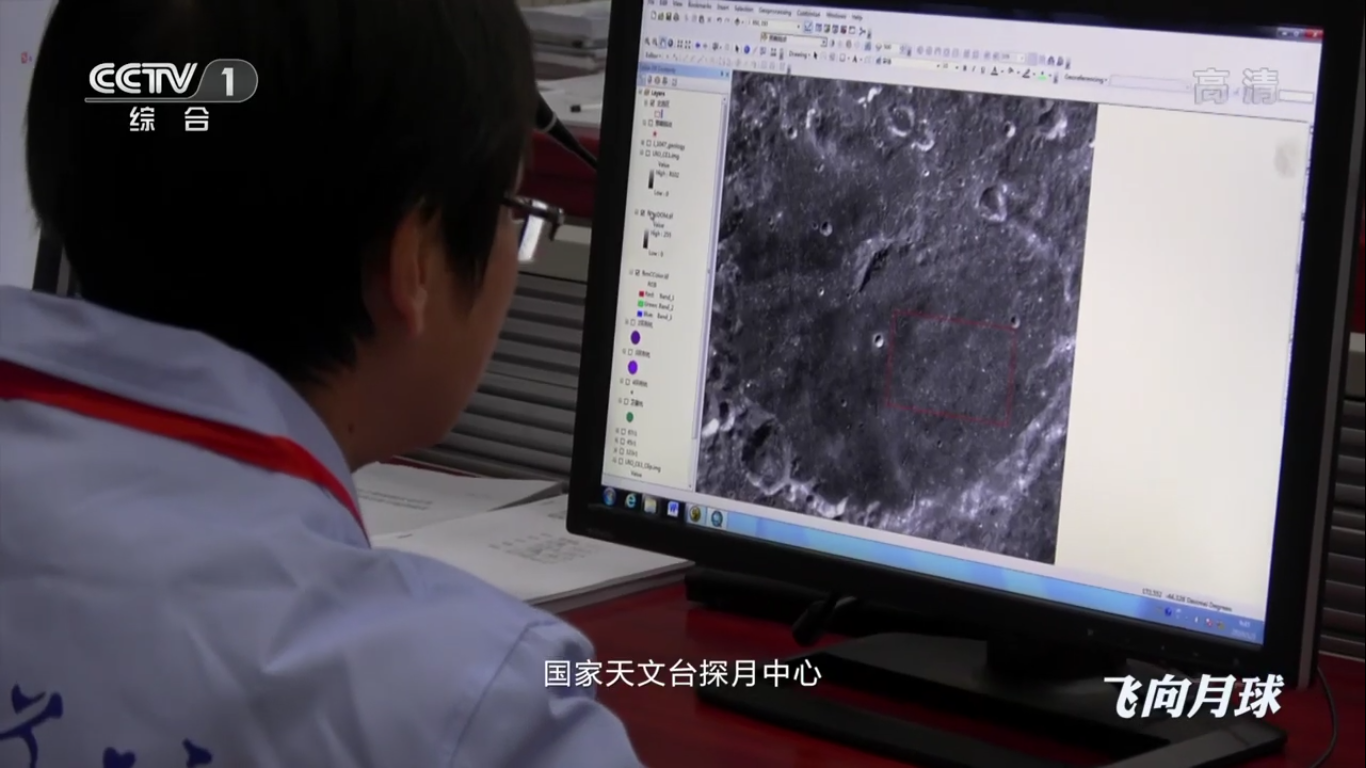
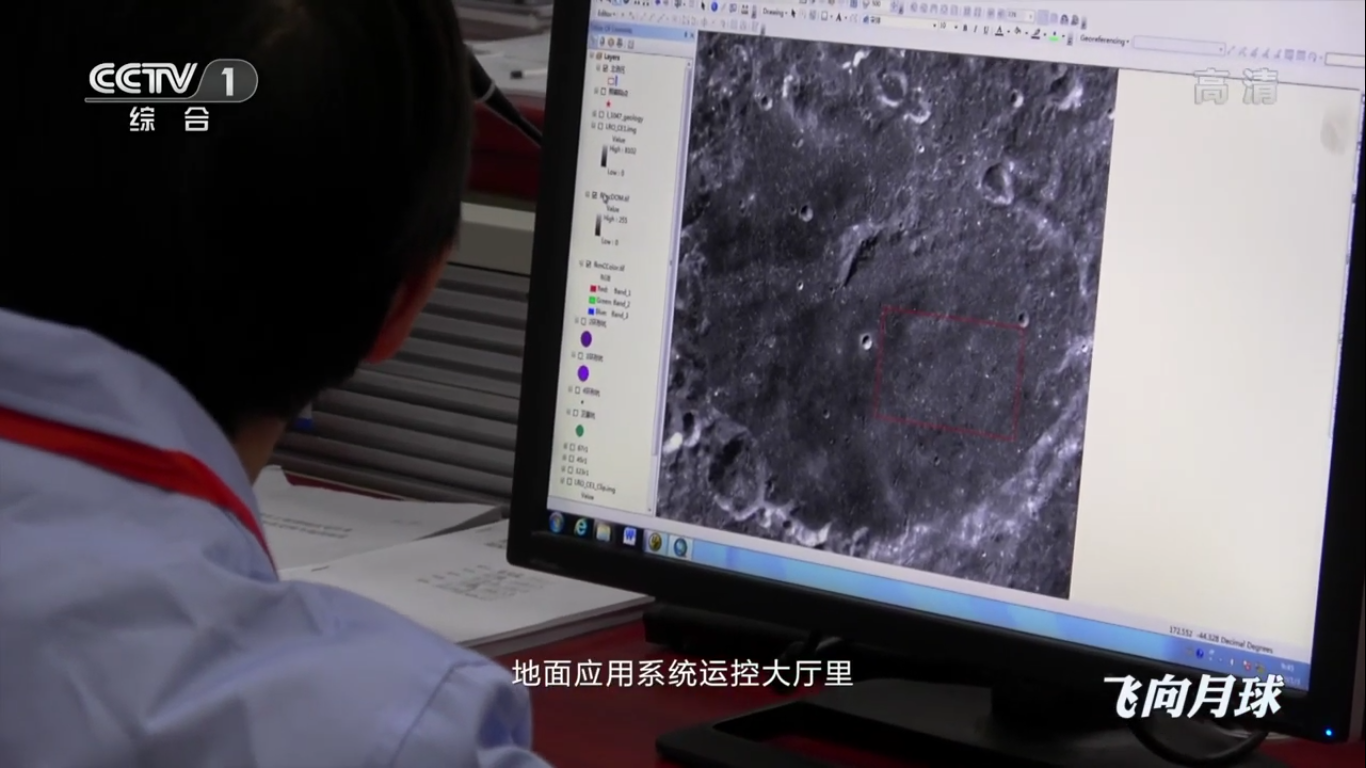
Yutu-2ローバーオペレーターは、仮想サーフェスマップに依存しています。

LRO月周回探査機(NASA)によって作成された Chang'e-4モジュールの着陸地点の写真:
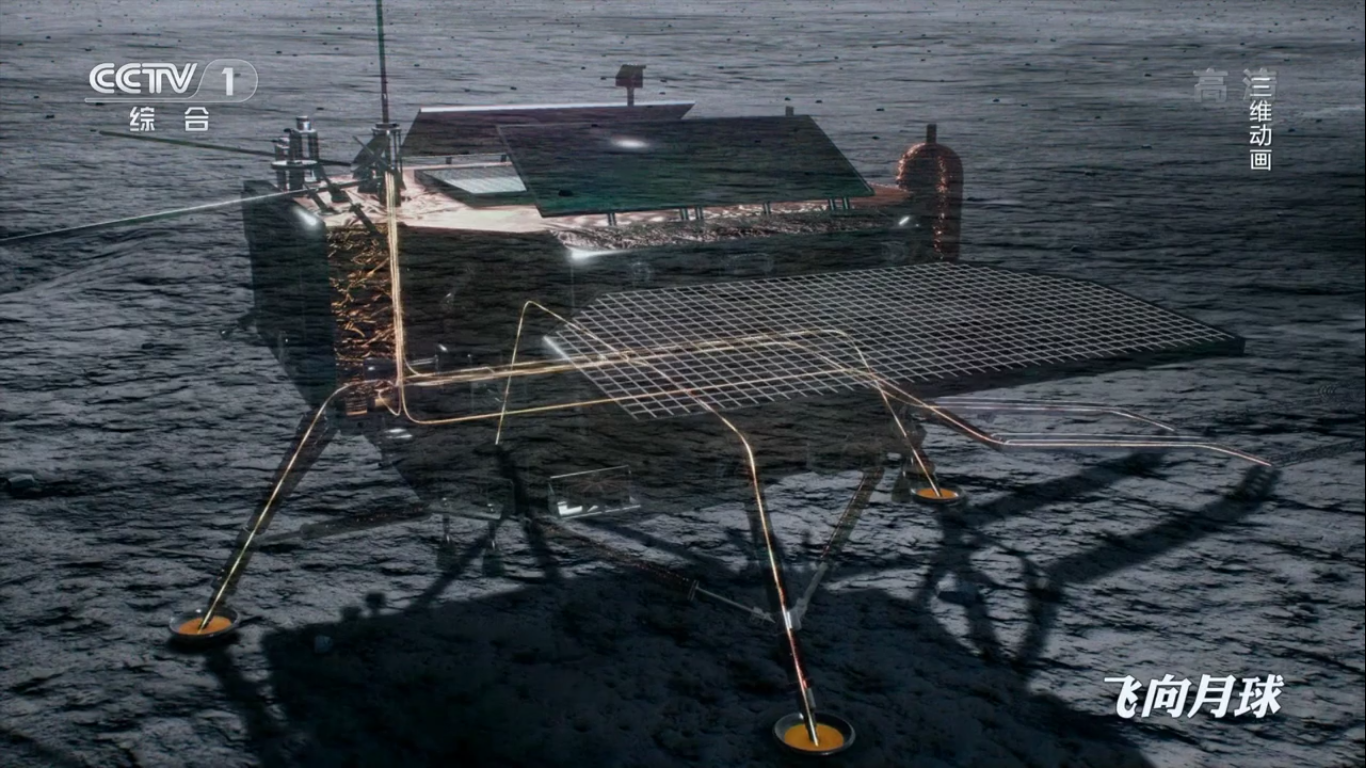
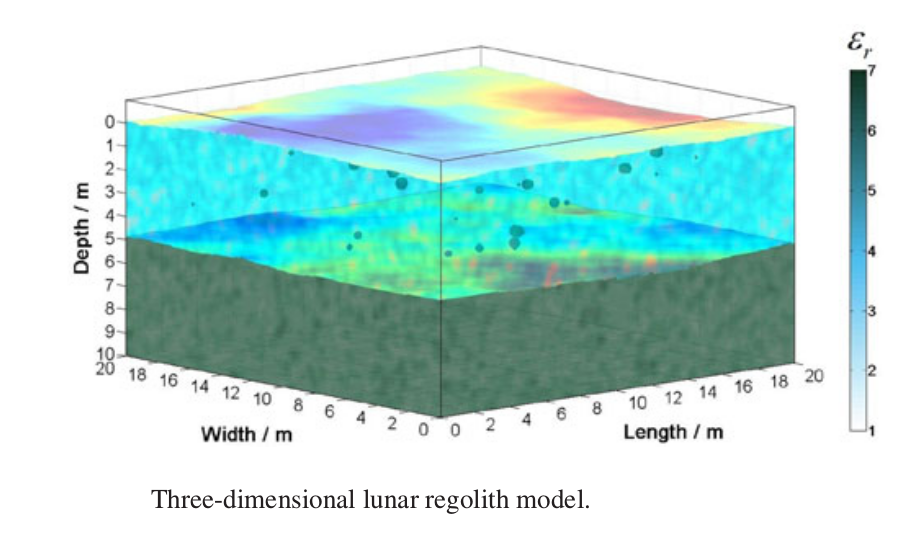
Yutu-2ローバーは、特別なレーダー(その外側は2つのアンテナアンテナと下部の平面アンテナ)で月の表面(LPR-月面レーダー)を貫通し、月面の地下部分の3次元マップを作成します。
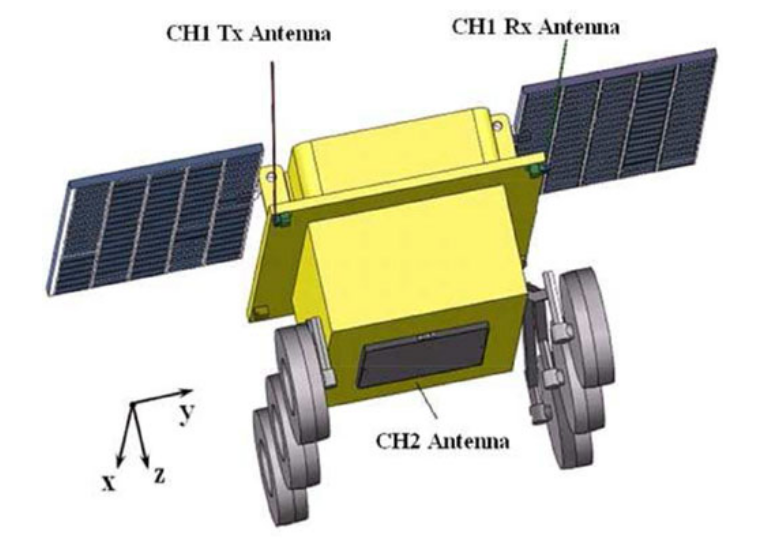
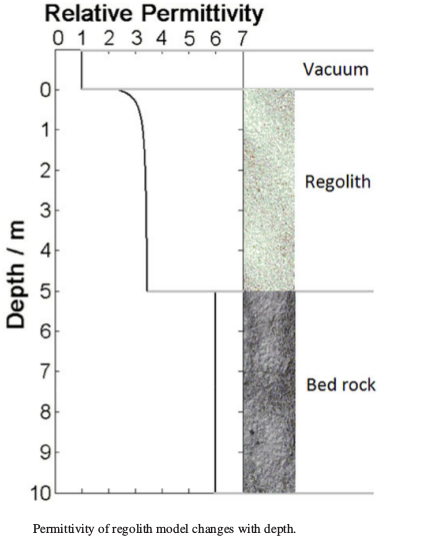
月面貫通レーダー(LPR)機能:
チャンネル1:
-トランスミッター電圧-1000 V(エラー<5%)
-送信機パルス周波数-0.5、1、2 kHz
-送信パルスの到着時間-<= 5 ns
-レシーバー周波数-10-175 MHz
-レシーバー入力ダイナミックレンジ-> 90 dB
-アンテナ中心周波数-60 MHz
-アンテナ帯域幅-> = 40 MHz
-定在波関数-<= 3
-最大検出深度-> = 100 m
-深度分解能-1 m
チャンネル2:
-トランスミッター電圧-> = 400 V(エラー<5%)
-送信機パルス周波数-5、10、20 kHz
-トランスミッターのパルス到着時間-<= 1 ns
-レシーバー周波数-10-1000 MHz
-レシーバー入力ダイナミックレンジ-> 90 dB
-アンテナ中心周波数-500 MHz
-アンテナ帯域幅-> = 450 MHz
-定在波関数-<= 2.5
-最大検出深度-> = 30 m
-深度解像度-<= 30 cm
Yutu-2ローバーに取り付けられた月面貫通レーダー(LPR)は、そのデバイスがChang'e-3ミッションの最初のYutuローバーに取り付けられたレーダーに似ています。
LPRレーダーから受信したデータは分析され、着陸エリアの月面の地質構成と特性を追跡できるグラフに要約されます。
中国宇宙技術アカデミーの飛行制御センターの科学者とエンジニアは、研究を実施し、Chang'e-4着陸モジュールとYutu-2ローバーのデバイスからデータを取得するために、5日目の月(地球2週間)の時間を最大化しようとしています。
Chang'e-4着陸モジュールとYutu-2ローバーの科学機器の詳細については、こちらをご覧ください。
Chang'e 4ミッションは月の3日目です。 ローバー「Yutu-2」〜石探し
Chang'e-4ミッションは、着陸モジュールと中継衛星上の科学機器です
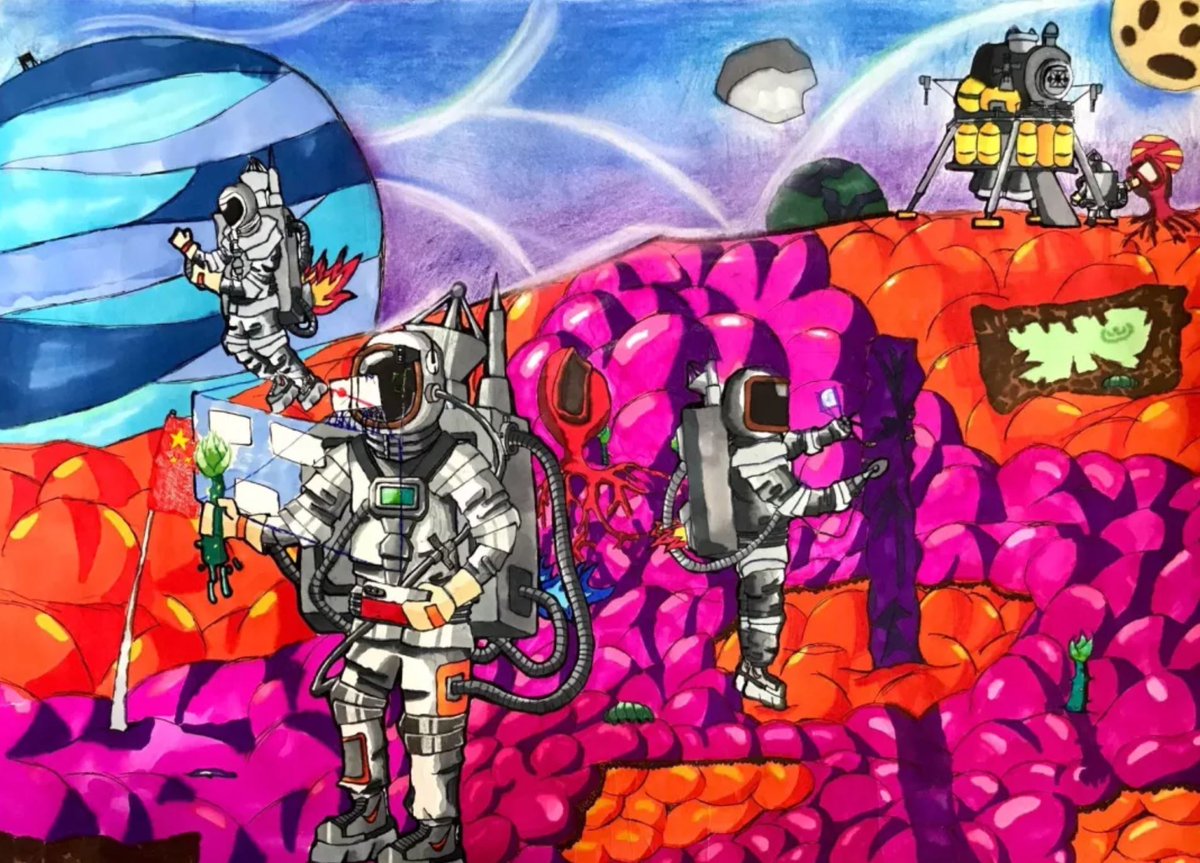
ちなみに、2019年4月24日(中国の宇宙飛行士の日)には、中国航空宇宙協会が主催する宇宙と月の征服をテーマにした子供向けアートコンテストが開催されました。
子供たちの仕事は素晴らしいです。
Guo Zhicheng-未来の宇宙を探る
ハン・ジアシン-宇宙に行きました
Dan Xianue-宇宙を超えた庭
ティエン・シーアン-未来の宇宙ステーション

heng玉峰-一緒に空間を彩る

Fang Yongxin-エネルギー変換ステーション

Li Mengyin-グローバルソーラーシステム

徐志雲-研究者

ヤン・ハオワン-宇宙基地

ヤンジンル-バキュームシティ

Zhuo Xiyuan-浮遊宇宙船

周In陽-Mora No.1451

私は特にこれらの作品が好きでした:
ウェイウェイ-私の心は星でいっぱいです

大嘉ay-宇宙の夢

Liu Ruiyang-宇宙の私の音楽
