みなさんこんにちは! ヘキサポッドの開発は、最初の戦闘バージョンの完成に近づいています。そして今、その電子充填のすべてを説明する時です。 また、HC-SR04を追加して、ヘキサポッドの外観の視覚的な満足度が非常に低い障害物を検出しました。 少し新しいビデオがあり、あなたは私を電子的に蹴る機会があります。
開発の段階:
パート1-デザイン
パート2-アセンブリ
パート3-運動学
パート4-数学の軌跡とシーケンス
パート5-エレクトロニクス
HC-SR04がインストールされた状態で表示 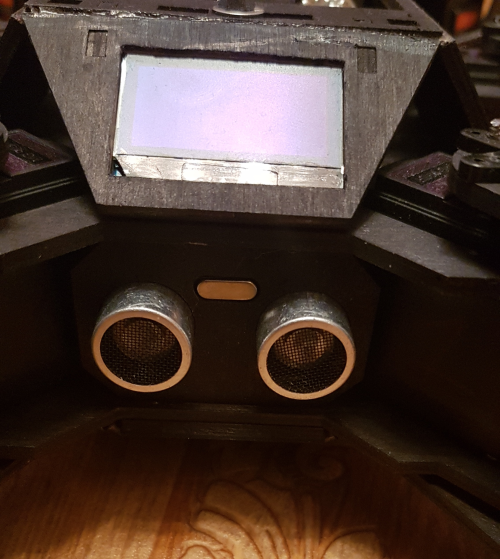
最初は、ケースは電源と制御ボードを分離するように設計されていたため、1つはバッテリーに近いケースの中央に配置され、2つ目はデバッグを容易にするために表示されます。 それでは始めましょう。
制御ユニット
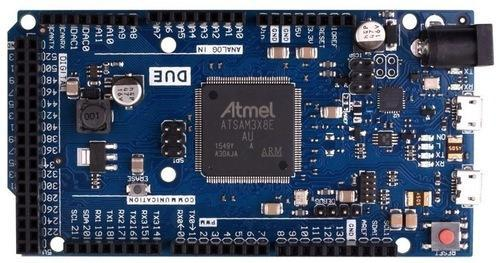
コントロールユニットは、SAM3X8Eコントローラーに基づくヘキサポッドの「頭脳」であり、2つのボードで構成されています:コントローラーを備えたボードと分電盤。 コントローラーを搭載したボードは既に使用されていますが(下図)、配電盤を製造する必要があります。 おそらく、将来的には、コントローラーでサンドイッチを取り除く場所を備えたボードを工場で注文するでしょう。
分電盤の主な目標は、「軽い」周辺機器、コントローラーに電力を供給し、ピン間で信号を分配することです。 このボードの要件のリストをまとめました。
- ボードHLK-RM04(UART-WIFIコンバーター)にインストールする機能。
- I2Cディスプレイを接続する機能。
- HC-SR04を接続する機能。
- バッテリー電圧を測定する能力=ボード供給電圧;
- 周辺機器の供給電圧とHLK-RM04を測定する機能。
- バッテリーの放電を示すためにツイーターを接続します。
- システムの状態を示すLED表示:重要な何かが落ちた(構成が間違っているか、他の何か)、重要でないものが落ちた(たとえば、表示)、すべてが正常です。
基本的な要素を少し決めて、ルーズパウダーで巣の卵の可能性を評価した後、すぐに回路図を作成せずにボードレイアウトを作成し始めました。 それは初めて働き、私は作品の中にジャムを見つけませんでした。 配線は次のとおりです。
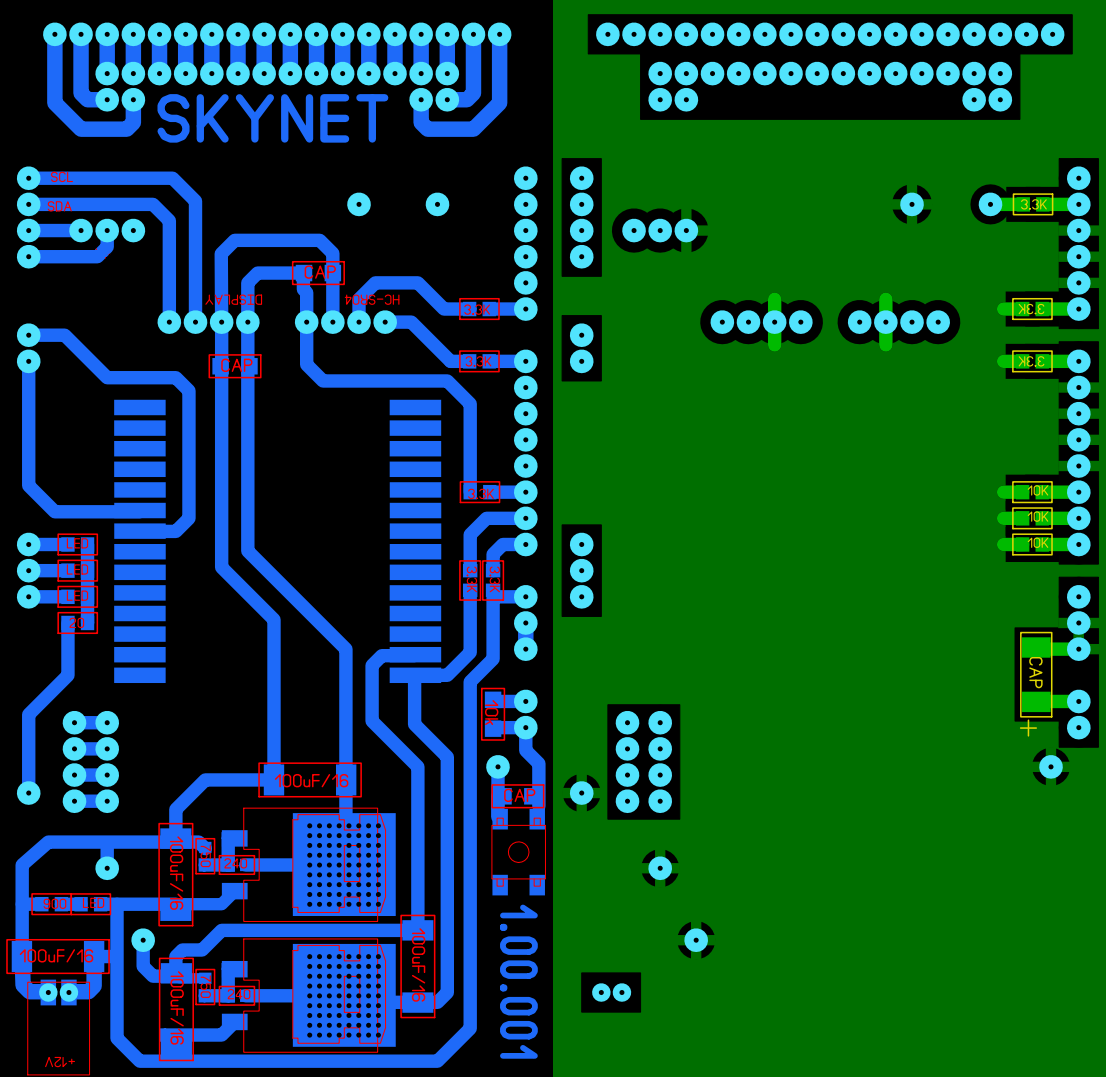
製造工程中に問題が発生しないように、彼はトラックの幅を特別に広げました。 LUTを使用してボードを作成することにしましたが、わずか2回でうまくいきました。 写真のネタバレの下で、失敗したオプションと成功したオプションを比較します(左側が失敗、右側が成功)。
写真 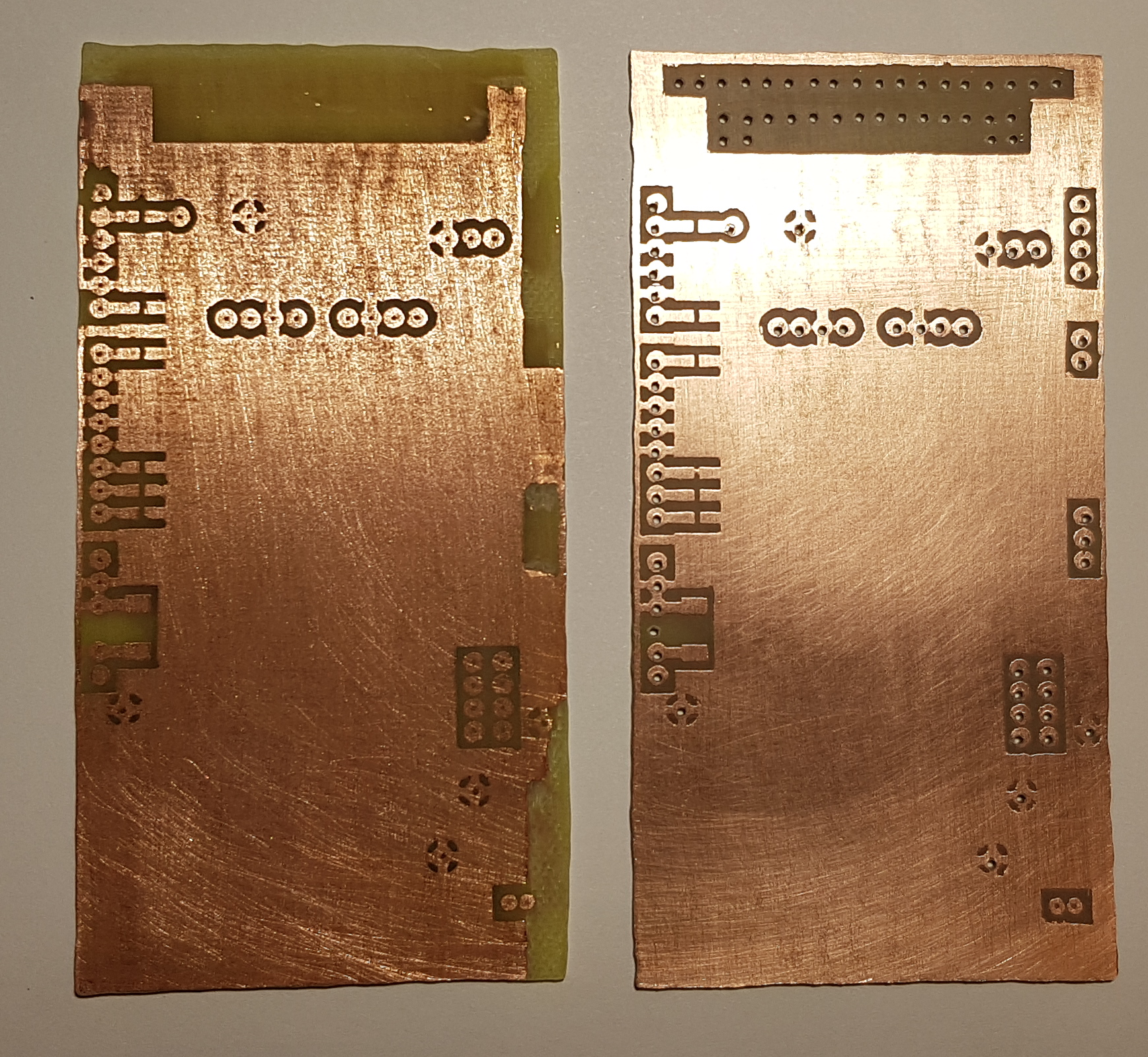
さて、すべてが指示に従っています-ボードをだまし、穴を開け、コンポーネントを投げます。 結果はすぐに来ました:
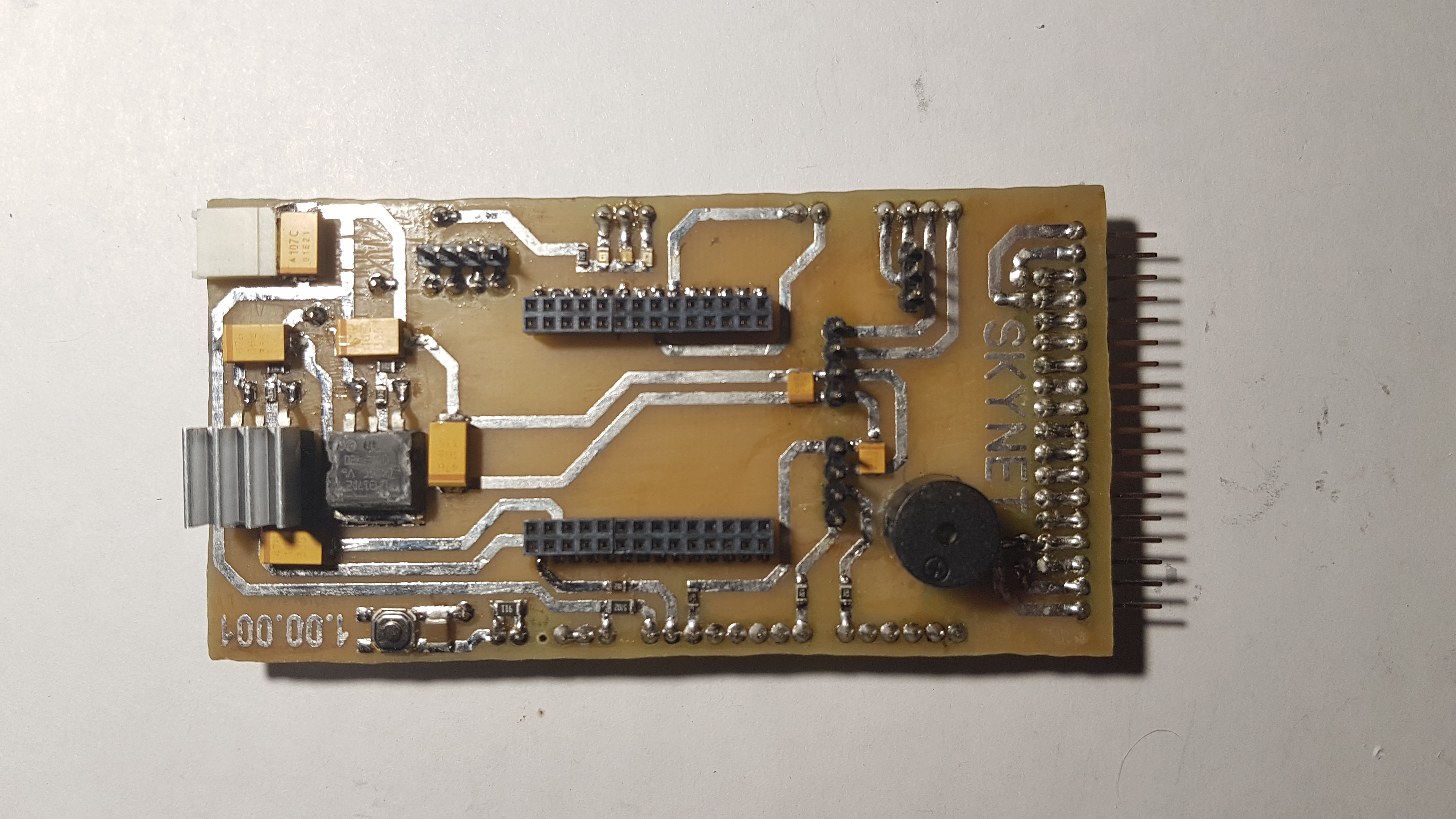
HLK-RM04は中央に挿入され、電源ボードへのケーブルは右側のコームに挿入され、電源は左側に供給されます。 ボード上の電圧は、単純な分圧器によって測定されます。 長期間の動作中(30〜40分)、HLK-RM04の電圧レギュレーターが大幅に熱くなり、ラジエーターを取り付けました。
HLK-RM04 
パワーボード
ドライブの合計消費電流(ピーク)は、10〜13Aの歩行時、5〜6Aの重負荷時で約30A(ドライブあたり平均約1.3A)です。 測定は、マルチメーターを使用して経験的に行われました。
私は、リニア電圧レギュレータに基づいて、各ドライブの電力を別々にすることにしました。 18のリニア電圧レギュレータ-各ドライブに1つ。 リニアレギュレータが使用されるため、5Vを出力するように構成されたLM317D2T-TRが使用されます。 18個のリニア電圧レギュレータを使用し、原則としてレギュレータを使用する理由はいくつかあります。
- ドライブをバッテリーに直接接続することはできません。これらのドライブの最大許容供給電圧は6Vです。
- 速度の相対的な独立性\入力電圧からのドライブの努力;
- リニアレギュレータが積み上げられています。 Aliで70個のパッケージを購入しました(このアイテムがソリューションに最も貢献しました)。
- 私はそのような電流のための線形電圧調整器を見つけませんでした。
- そのような電流用のコンパクトで軽量なDC-DC回路は見つかりませんでした。
- レギュレーターを並列に接続するオプションはかなり疑わしいです。
- オプションの「リニアレギュレータ+増幅トランジスタ」は、リニアレギュレータが提供するすべての保護機能を電源回路から奪います(少なくともそれは人々が書いたものであり、この場合は同意します)。
- 私はスイッチング電源の設計がかなり苦手です。
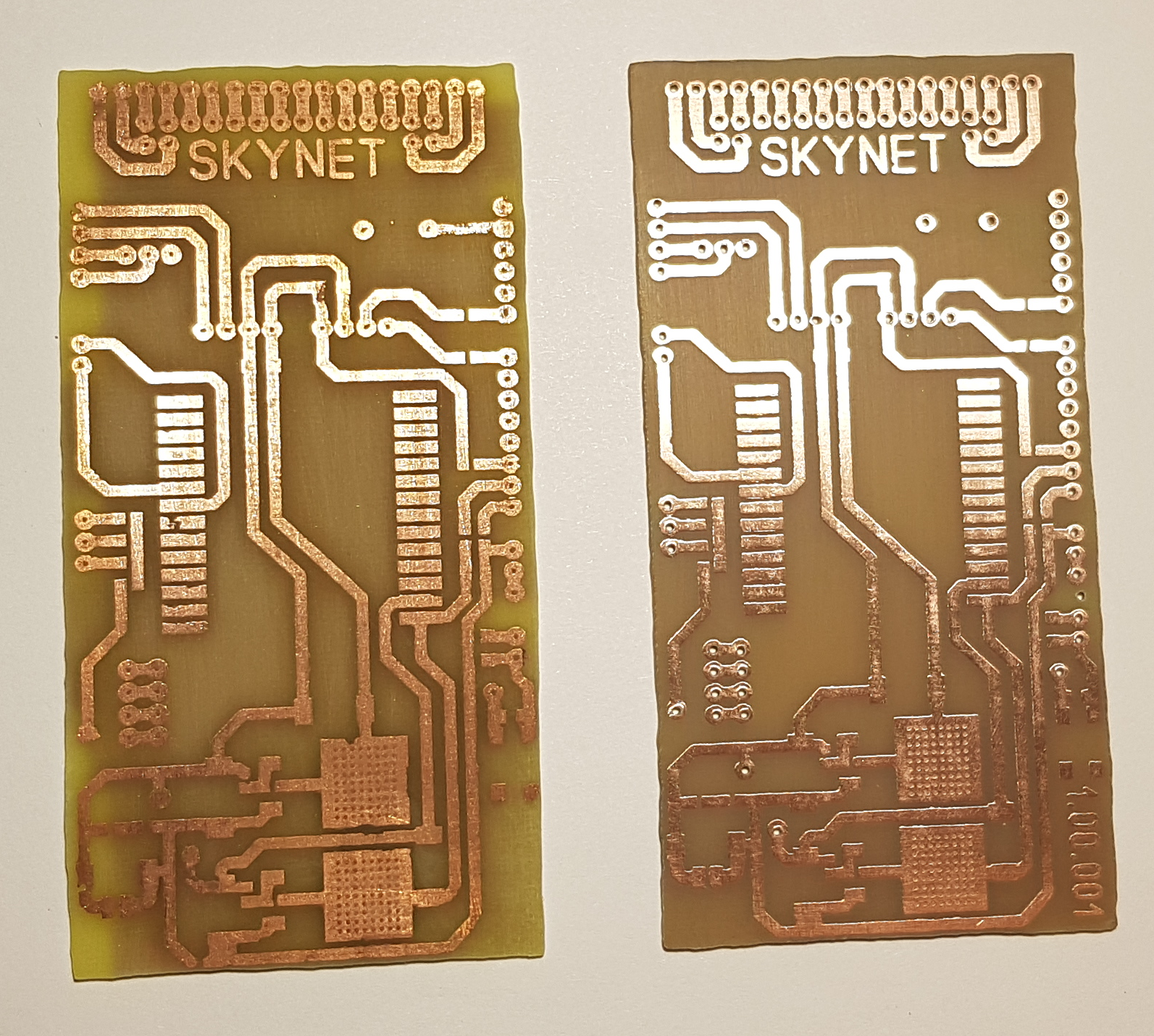
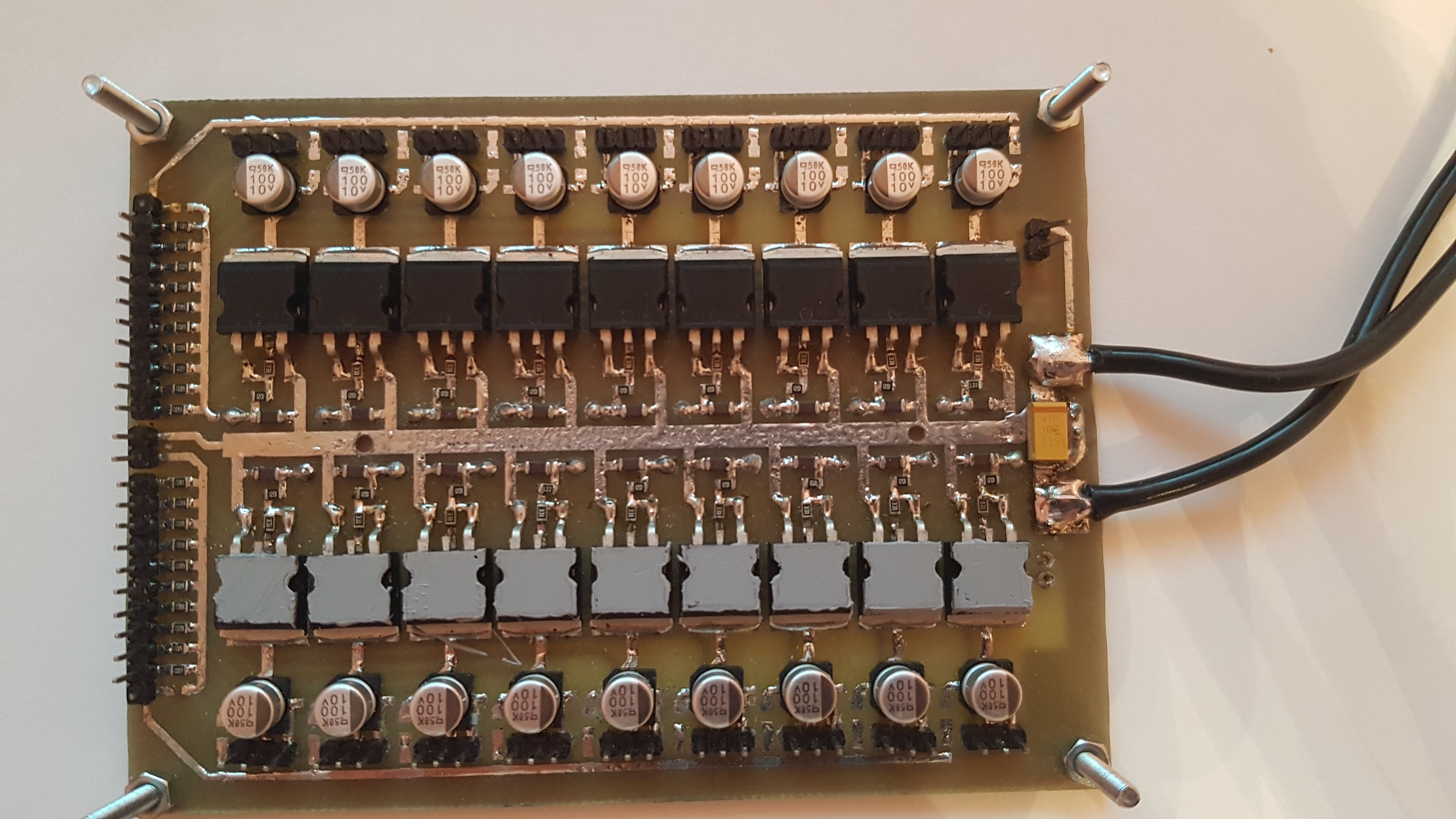
ボードは非常にシンプルで、回路図も作成しませんでした。結果をすぐに見たいという気持ちも感じました。 配線は次のとおりです。
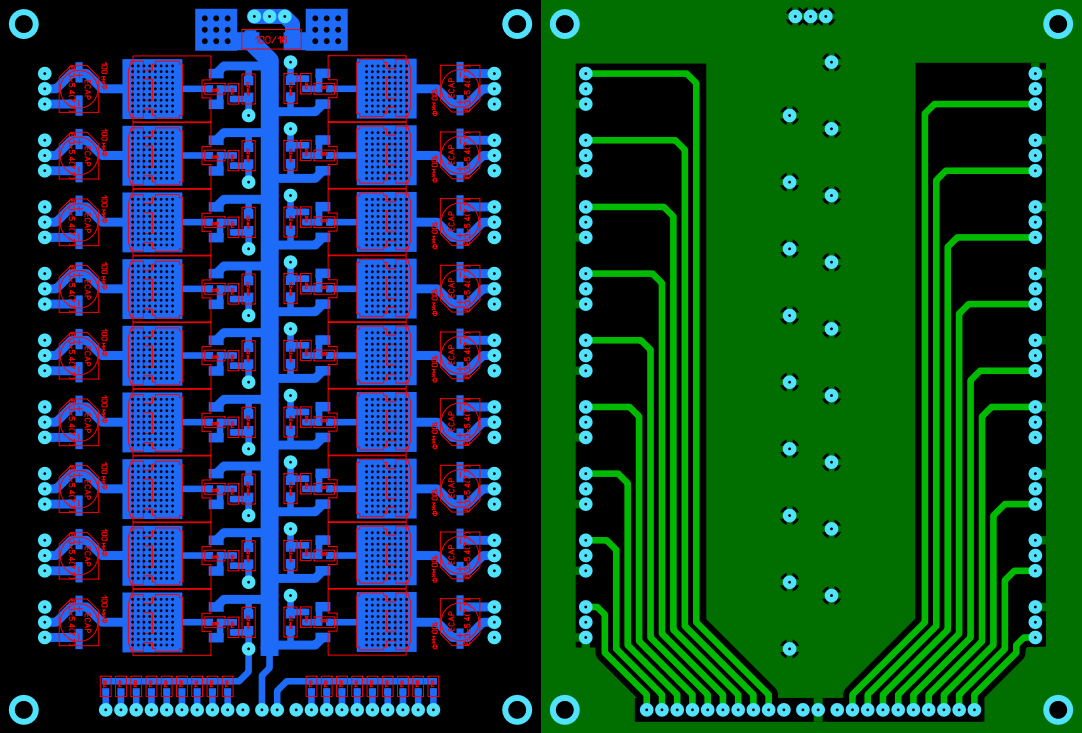
上部にはバッテリー用のワイヤをはんだ付けするための接触パッドがあり、下からケーブルと電源用の櫛がコントロールユニットに接続され、ドライブは側面に接続されています。 最初は、各サーボドライブが消費する電流量を測定し、ボードの温度を測定できるようにしたかったのですが、まだ複雑にしないことにしました。
ボードはシンプルで信頼性が高く、壊れることはありません。 11.1V(3S LiPo)および7.4V(2S LiPo)の入力電圧で負荷試験を実施しました。 11.1Vの入力電圧では、予想通り、コントローラーが高温になり、歩行中に温度保護が作動し(ラジエーターは保存されず、SMDコントローラーも)、入力電圧を下げることを余儀なくされました。 7.4Vの電圧では、レギュレーターは暖かく、長時間の歩行で、保護は機能しなくなります-これが必要なことです。
ボードもLUTを作成し、初めて非常にうまくいきました。 残念なことに、ボードの実験版の写真しかありません。どこかで4時間ほど新しいものを取り出したくはありませんでしたし、写真のために分解したくありませんでした(ケースの約70%を分解する必要があります)。 古いものと新しいものの違いは、ボードの中心線に穴がないことだけです(面白い実験が行われました)。
いくつかのビデオ
HC-SR04のパフォーマンステスト
六脚に対する私の猫の態度
初めての街歩き