3年前、私は月に打ち上げる宇宙船を開発し、半世紀前に残った痕跡を区別するのに十分な品質でアポロとルノホッドの着陸地点を撮影することを提案しました。 熱心なエンジニアのグループがプロジェクトへの参加を志願し、このタスクを引き受けました。 開発の最初の段階-衛星の技術的な説明 (前進プロジェクト)-は3年かかり、まだ完了していません。
最初の段階を完了するために、サイトboomstarter.ruで募金活動を発表しました。 私たちは1万5千人の人々に支えられ、集められた総額は100万75万ルーブルに達しました。 プロジェクトのすべての作業はボランティアベースで行われ、集められた資金の一部は、無線通信システムとレーザー通信のプロトタイプの開発のための機器とコンポーネントの購入に充てられました。 私たちは、ロスコスモス研究所で準備されたプロジェクトの国家試験のために支払う金額の大部分を取っておきます。 審査後に資金が残っている場合は、共通の原因、つまり最終文書のテキストへの貢献に比例して、開発参加者間で資金を共有します。
プロジェクトに関する一般的な質問への回答を以下に示します。
チームのタスクは、プロジェクトの技術的な説明を作成することだけでなく、ロシアの宇宙産業の文書化の要件に従って作成することでもありました。 小型宇宙船用のこのような事前プロジェクトの準備には約100万ルーブルがかかり、関連組織は数か月でそれを行っていましたが、設計部局にお金を与え、目的の文書を入手して棚に置きたいだけではありません。 目標は、事前のプロジェクトを作成し、写真衛星を収集し、飛行プログラム全体を実行できる専門家のグループを形成することでした。
実際、これが一部遅延の理由です。 すべての愛好家がチームで働く準備ができているわけではなく、すべての人が自分の仕事の結果を深刻なエンジニアリング文書にまとめることができず、誰もがボランティアを家族/学校/仕事と組み合わせることができませんでした。 私は自分自身の遅延の主な原因を見る-私は必要な厳格さと忍耐力を示さなかった、私は個人的な例に少し触発された。
現在、チームの編成に関する作業は継続されており、ドキュメントはゆっくりと確実に準備されています。 宇宙産業の締め切りに間に合わないことはよくある現象です。
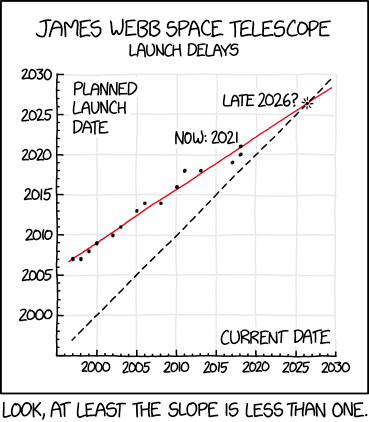
これについては、独自の例を使用して詳細に説明できます。
宇宙船を作成する難しさは何ですか? なぜ「コンストラクタを購入して組み立てる」ことができないのですか? 新しい技術の開発に関連するほとんどすべての宇宙プロジェクトが、定められた期限に間に合わないのはなぜですか? 結局のところ、すべての宇宙船には約1セットのオンボードシステムがあり、宇宙はどこでも同じように見えます-真空、放射線、日光...宇宙飛行士は、すべてがパーソナルコンピュータのように統一されているわけではないので、独自の衛星を組み立てるためのガレージ。 しかし、実際には、ほとんどすべての宇宙船は手作業であり、ひねりとスコッチテープ上のワイヤ、創造的なアプローチ、そして多くの場合は自作ソフトウェアです。
GPS、GLONASS、静止電気通信衛星、およびその他のプロジェクトの一部のマルチサテライトプロジェクトのみが生産前レベルに達しました。
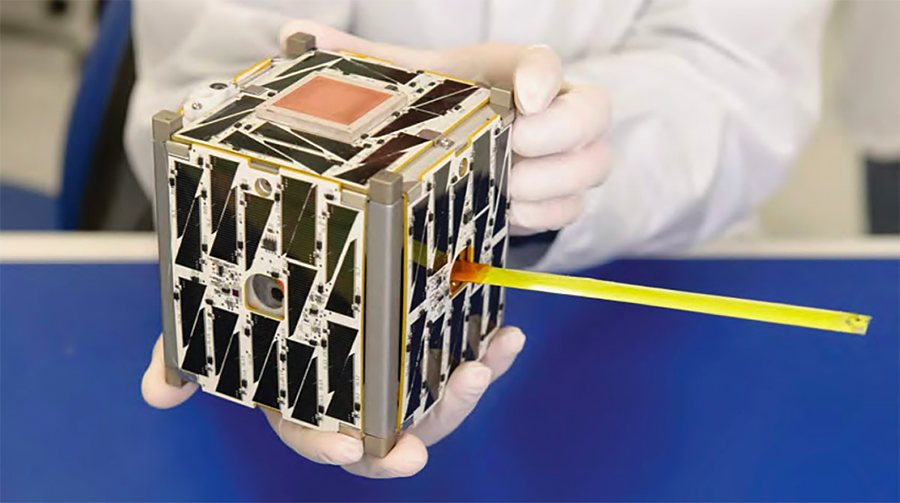
CubeSat形式のナノサテライトは、低コスト、標準寸法、および研究所や民間企業の間での人気により、ほぼ統一されています。
なぜ衛星はどこでも違うのですか?
パソコンと比較して、スペースとの最初の違いはシリーズのサイズです。 地球に近い軌道で動作するすべての宇宙船は約1.5万です。 1つの都市部には非常に多くのコンピューターがあります。
2番目の違いは、異なる軌道の物理的状態の違いです。 約40〜45%の低地球軌道では、衛星は地球の影にあります。 これは、太陽や車載システムの加熱から蓄積された過剰な熱を簡単に取り除くことができることを意味します。 静止軌道または惑星間飛行のデバイスは、ほぼ100%点灯します。熱損失は大きな問題です。これにより、熱条件を提供するシステムが複雑になり、ラジエーターと質量が大きくなります。 そのため、地球に近い衛星の設計をそのまま月に打ち上げることはできません。
月の衛星では、熱の問題が2倍になります。まず、一定の日光で飛行し、次に月の周りを回転しなければなりません。 低いほど、影の領域が長くなります。 また、デバイスの基本設計と構成の説明を完了しているだけですが、まだ熱計算には達していません。
低地球軌道では、衛星は磁場を使用して自分自身の向きを変えることができます。つまり、重心に対する空間の位置の変化(言い換えれば、衛星は、コンパスの針を偏向させる同じ力を使用して、それを「見る」場所または太陽電池パネルで向きを変えることができます)。 つまり、低軌道の地球に近い衛星は、燃料とロケットエンジンを必要としません。フライホイールエンジンと磁気コイルに電力を供給して効率的に動作し、利益を得るのに十分なソーラーパネルです。 磁場が弱くなるか、まったく存在しない場合、デバイスは回転するためにロケットエンジンを必要とします。 地球に近い衛星をつかって月に向けて打ち上げると、それは役に立たないきしみ音に変わり、無限の「ビープビープビープ」だけを送信できます。 最良の場合、軌道に入らずに1つの軸に沿ってねじって飛行任務に使用できます。
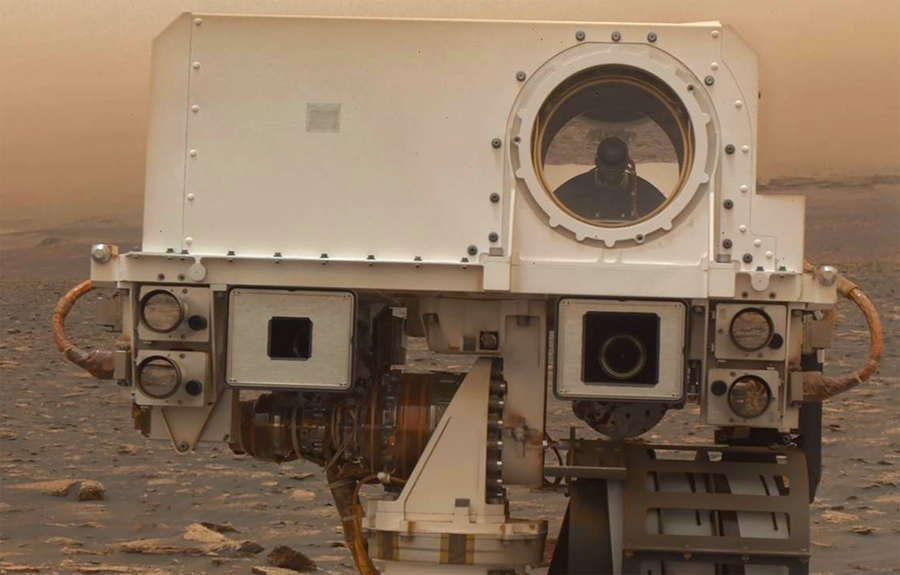
宇宙放射係数も重要です。低軌道では、衛星は地球の半球、磁場、上層大気による宇宙粒子の影響から大幅に保護されます。 ただし、実践が示すように、産業用の最新の地上電子機器は、惑星間空間で最大1年間機能します。
デバイス間の3番目の違いは、軌道を変更する必要があることです。 原則として、小型の地球に近い衛星は、軌道を打ち上げられた軌道から変更する必要はありません。 極端な場合、Planetが当初決定したように、空力技術を使用できます。 高軌道の衛星の場合、飛行時間と時間の経過とともに蓄積し始める妨害因子のために、軌道修正がすでに必要です:日光の圧力、太陽、月、木星、金星の重力。 軌道修正とは、飛行速度を増減することによる軌道の小さな変化です。
デバイスを起動すると、飛行します
惑星間ビークルの設計は、打ち上げ時の打ち上げ能力に大きく依存しています。 惑星間プローブに所望の軌道と第2の空間速度を即座に設定できる十分に正確な加速ユニットがある場合、これにより、デバイス自体の燃料質量が大幅に節約されます。 適切なブースターブロックがない場合、またはロケットを運ぶための十分なロケットキャパシティがない場合は、さらに多くの装置を装置に注入する必要があります。 しかし、たとえ加速器が助けたとしても、目標は再び惑星間速度を大幅に消滅させる必要があります。 月への飛行の場合、軌道に落ちるには約850 m / sが必要です。 100 kgの貨物を最速のジェット機の速度まで加速できるロケットを想像してください。映画のような消火器は十分ではありません。
月のマイクロサテライトを設計するとき、2つの発射オプションを検討しました。静止軌道への関連発射と月移行軌道への発射です。
静止軌道は商業目的で人気のある軌道で、毎年15〜20発のミサイルが飛行します。 つまり、選択範囲が広く、通過するフライトの多くの可能性です。 しかし、これはわずか3万6,000 kmであり、月まで10倍以上飛行する必要があります。
月遷移軌道は、ほぼ2番目の宇宙速度で月に向かって打ち上げられます。 このような打ち上げは、年に1回程度行われます。 中国、インド、日本、ロシア、韓国は月に月を打ち上げ、または月に打ち上げようとしており、誰かの尻尾にジャンプする可能性があります。 ただし、複雑な科学的打ち上げは常に延期されているため、共同飛行に同意し、衛星を作成し、主装荷の準備が整うまで数年待つことができます。 適切な「乗車」を見つける可能性が低いため、理想的なオプション-デバイスを月軌道に即座に配送する-は考慮しません。
2つの発射オプションには、異なる燃料予備の2つの異なる推進システムが必要です。 2つのバージョンのデバイスの開始時の質量は2倍異なり、「静止」バージョンは200 kg近くになりました-これはもはやマイクロサテライトではありません。 エンジンは、宇宙での使用に最も効果的な化学物質として、2成分ヒドラジン(ヒドラジン/四酸化窒素)と見なされていました。 イオン、プラズマエンジンは、コストが高く、太陽電池の寸法が大きく、制御とナビゲーションが難しいため、考慮されませんでした。
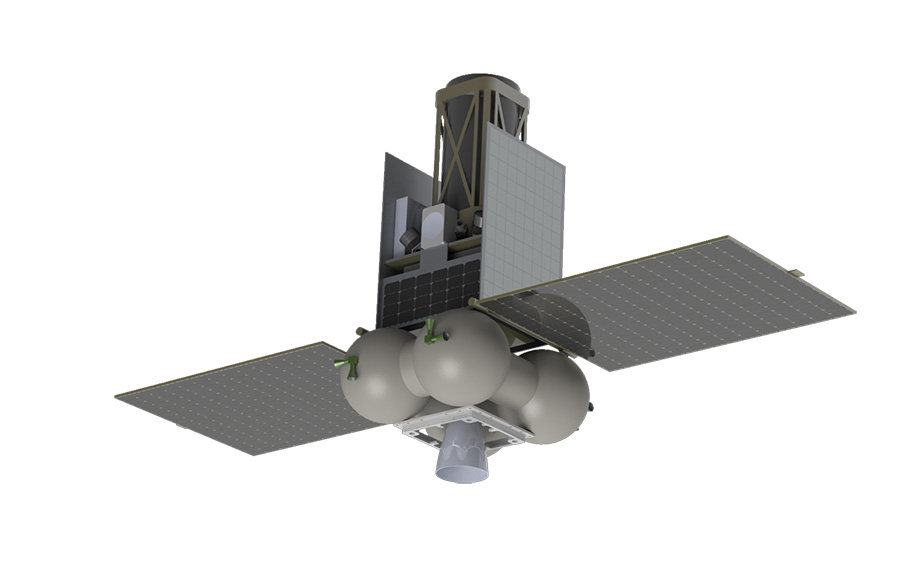
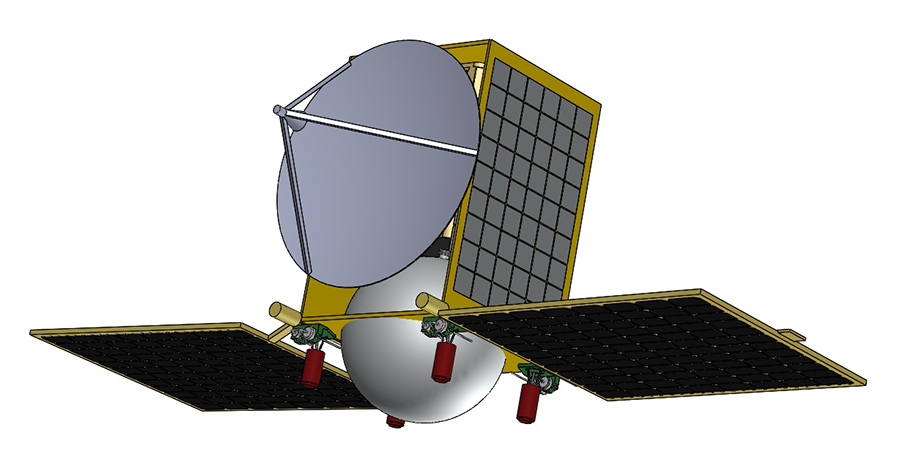
結果はかなり複雑な装置であり、国営企業の設計局で生まれる可能性のあるものに非常に匹敵しました。
軌道の違いは、情報を伝達する手段に別の違いを生じさせます。 宇宙でのレーザー通信の繰り返し実験にもかかわらず、無線通信は依然として宇宙で情報を送信する主な方法です。 デバイスが地球に近ければ近いほど、その無線コンプレックス、電力消費、アンテナサイズは小さくなります。 したがって、小さな地球に近いCubeSatは、テレメトリや写真さえも、地球上の無線アマチュアに安全に送信できます。ソーラーパネルとジョイナーのルーレットからの無指向性アンテナが非常に小さくなっています。
月の近くで作業して大量のデータを転送する場合は、直径が少なくとも0.5メートルの尖ったアンテナプレートと、面積が約1メートルのソーラーパネルに注意する必要があります。 地球上での受信では、窓の葉からのワイヤを提供できなくなります-深刻なステーションでは、直径数メートル、できれば数十メートルのアンテナが必要になります。 ロシアにはそのようなステーションがわずかにあり、世界には何十ものステーションがあり、それらはすべて仕事で忙しい。 64メートルまたは32メートルのアンテナが割り当てられることはほとんどありません。
少なくともあなたはそれに頼ることはできません。 デバイスのアンテナの直径を大きくすることにより、地上で節約できます。 ただし、アンテナの直径10 cmまたは衛星の太陽電池の範囲ごとに、質量慣性特性に大きな影響があり、方位システムに必要な燃料とエネルギー消費量が大きくなります。 エネルギーの必要性は、太陽電池パネル、バッテリーの質量を増加させ、燃料タンクの質量の増加と成長につながります-そして、無限に...などです。したがって、宇宙技術の開発は永遠の妥協です。

重量を節約するために、アンテナの直径を40センチメートルに制限しました。これは、地球への打ち上げ時までに12メートル以上の受信アンテナが見つかることを期待しています。 そして、より良い3つ、異なる大陸に。 見つからない場合は、非常に低速でデータを送信する必要があります。毎秒数十キロビットですが、無線アマチュアは受信を利用できます。
正しい向き
次の問題は、空間の方向です。 地球は、磁場、空気力学、またはその他の技術を使用できます。 ロケットエンジンは惑星間空間に残りますが、高精度の向きを提供し、重心に対するデバイスの位置を効果的に制御できる別のツール、フライホイールエンジンがあります。 これらは、大きな車輪を備えた電気モーターであり、回転しながら、デバイスを反対方向に回転させるのに役立ちます。 3軸のオリエンテーションでは、3つのフライホイールエンジンが必要ですが、通常は4つ-予備用に1つを配置します。

フライホイールエンジンは、動作するために電気のみを必要としますが、速度が上がるか、消滅した場合にのみ機能します。 ある時点で、フライホイールは最大速度を拾って役に立たなくなり、「アンロード」してブレーキをかけ、デバイスが空間で向きを失わないようにする必要があります。 そのとき、ロケットエンジンが荷降ろしに使用されました。これらは、デバイスの強い回転を引き起こさないように、非常に低い推力のエンジンでなければなりません。 オリエンテーションシステムのロケットエンジンが使用される場合があります。同じ映画の消火器のような通常の圧縮ガスには、熱触媒または電気ロケット(プラズマ、イオン)の設計があります。
月のマイクロサテライトであるPeter Kudryashovの常設デザイナーは、デバイスの質量を最小限に抑えることを目指しました。 この目的のために、プロジェクトの最後の反復で、彼らは月の遷移のみに焦点を合わせて、静止軌道からの飛行を放棄することにしました。 別の解決策は、エンジンの交換でした。 2成分のマーチング推進システムは高出力であり、フライホイールの荷降ろしには適していないため、衛星はオリエンテーションのために2番目の推進システムを必要としました。 これはプロジェクトを複雑にし、悪化させました。 ピーターは、中推力の単一成分熱触媒エンジンを供給する代替ソリューションを発見しました。 4つのエンジンは、軌道速度を変更するために適切な推力を提供し、側面に間隔をあけることで、ピッチとヨーでデバイスの方向を合わせることができ、ロール回転は2つの追加の低推力エンジンによって制御されます。 この決定は妥協のように思えますが、それでも何らかの形で回避する必要がある欠点もあります。
ロケットエンジンとフライホイールエンジンを「調整」しようとすると、問題が発生します。 私たちの規模の地球に近い乗り物でうまく機能する選択されたフライホイールは、私たちのサーキットのロケットエンジンによって設定された回転速度を補償するには弱すぎました。
ロケットエンジンのピッチとヨーの回転運動量は、エンジンを中心に近づけることで低減できますが、別の問題が深刻化します。 レバレッジ削減、すなわち エンジンの軸と装置の中心軸の違いは、フライホイールエンジンの各アンロード操作が衛星の軌道に何らかの変化をもたらし、変化が変化するという事実につながります。 ロケットエンジンの推力は可変であり、ブーストタンク内の圧力に依存します。
宇宙船の設計、寸法、エンジン出力、ソーラーパネルのサイズに影響を与える主な要因は、ペイロードです。 つまり 打ち上げ全体が実行される情報のためのデバイス。 私たちの場合、これは月の表面を撮影するための望遠鏡と光システムです。 また、デバイスの設計に影響を与える変更がありましたが、これは別の議論のトピックです。 一般に、変更は肯定的です-望遠鏡は縮小されましたが、変更により設計が大幅に改訂され、再び時間がかかりました。
月の撮影の特徴については、まだ個別に話す価値があります。
月のマイクロサテライトの予備設計がまもなく完了し、3年以上の作業の一般化された結果を共有できることを願っています。