
Vladimir Goncharov Shadow_ruは、要件の収集、作業のタスクの定式化、アーキテクチャの開発、ソフトウェアを実行するためのプロトタイプの作成について語っています。
プロジェクトは、要件の収集、一般化、およびその後のサブタスクの分解から始まりました。 ロボットのタスクは一見単純ですが、計画段階でのエラーは作業の結果を大きく損ない、常にすぐに表示されるとは限らないため、この段階をスキップすることはどこにもありません。
要件を要約すると、他のチームメンバーとのコミュニケーションが簡単になります。問題に対する共通の理解が生まれ、頭の中で各ロボットが発生しなくなる状況が発生します。 また、新しいメンバーがチームに入ったときに、同様のドキュメントを読むだけで十分であるため、エントリーフェーズの時間が短縮されます。
要件の収集と一般化には常にバランスがあります-もっと詳しく説明したいのですが、もしあなたが何百もの関連する段落を扱うことに慣れている弁護士でなければ-これは一般的なビジョンの問題を解決しません。 もちろん、異なるチームメンバーや外部の顧客や請負業者に対して要件のいくつかのスライスを作成する場合、適切なアプローチがあります。 しかし、今のところ、これは明らかに不要です。 要件が変更されるたびに、そのようなスライスの更新に多大な時間を費やすことになり、スタートアップの生産性にあまり影響しません。
私自身は、機能要件と非機能要件に分けて、すべてを1つのA4ページにまとめることにしました。 最初のバージョンは次のようになりました。
フェーズ1.問題のステートメント
課題:困難な気候条件でボールを収集するには、トレーニングゴルフコースの最大限の継続的な迂回が必要です。
問題: WGS-84表記のポイントの座標で境界線によって定義された空間を回避するために、巡回ミッションを実行するには、無人地上車両( UGV )が必要です。
ミッションには次の操作を含める必要があります。
- 既知のホームポジションからの通常のスタート
- 事前に未知の位置からの緊急スタート(WD操作、電源保護などの後のスタート)
- 1つまたは複数のレースで、スペースの少なくとも98%のカバレッジを持つエリアをバイパスします(15分後にホッパーを満たした後に再びフィールドをバイパスし始める必要はありません)
- ホームポジションに戻り、ホッパーを満たし、バッテリーを消耗させ、迂回路を終了します
- 発射台でレースをしてボールをリセットし、バッテリーを充電します
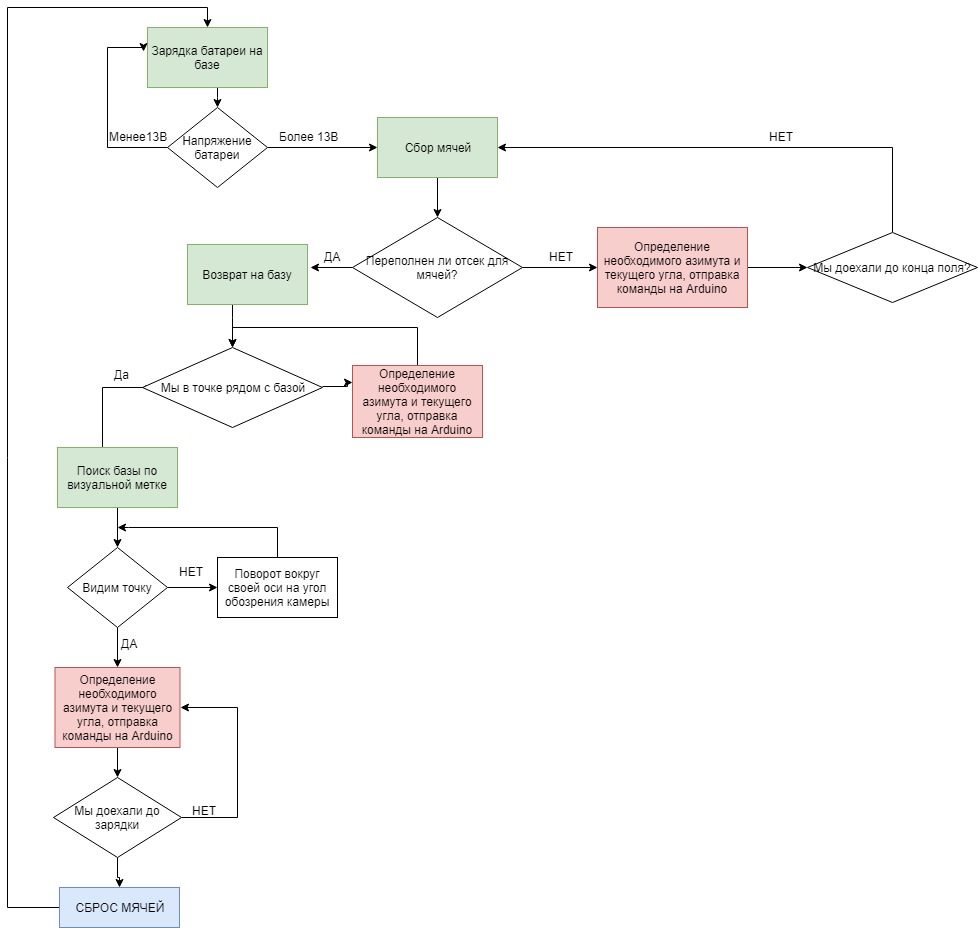
アルゴリズムの簡略版
さらに、UGVは次の要件を満たす必要があります。
- 指定された境界の周りを運転するとき、指定された境界を離れないでください
- ホーム位置は、指定された境界の外側にある場合があります。
- バッテリー消費を監視し、消費電力に基づいて返品を計画します。 満杯のホッパーを移動するには、空のホッパーよりも多くのバッテリー電力が必要です。
- 平面上の座標、6つの回転軸の値、テレメトリの信号レベル、外部センサーなどのテレメトリログを保存します。
- 粗い座標を取得するためのGPS、平面上の座標の検証と修正のためのIMU、マーカーによる正確な位置決めのための光学的な3つの位置決めシステムを使用します。
- 2つのWatch Dogシステム(ソフトウェアとハードウェア)があります。 ソフトウェア検証ステータス
- ミッションパラメータが指定されたパラメータ(座標、事故、停電、機器の故障)を超えた場合に使用される、別の電源を備えた長距離の緊急通信チャネルを備えている
- 在宅中にミッション設定を変更できる
- 視聴覚情報を伝送するための低速テレメトリと高速の2つの通信チャネルを持つこと。 高速は、テレメトリコマンドによって有効化/無効化できる必要があります。
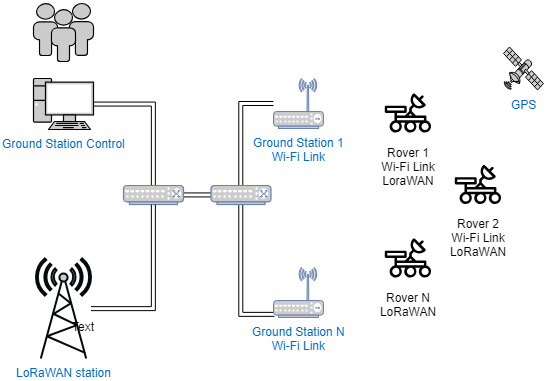
これらの要件に基づいて、次のソリューションアーキテクチャが選択されました。
ロボット複合体の構造には、1つのコントロールセンター(地上局制御)-以下GSCが含まれます。
ユーザーは次のことができます。
- 境界を設定
- 時刻と裁判所の負荷に基づいてミッションを計画する
- 少なくとも1分間の個別の読み取り値でゴルフロボットを監視する機能がある
- ミッションを中止する機能
GSCソフトウェアはゴルフロボットの動作を計画する必要がありますが、ロボット自体は非常にシンプルでなければなりません。 もちろん、ソリューションはそれほど柔軟ではありませんが、一貫性のあるソリューションとメッシュネットワークは、短時間で解決できるものではなく、安価でもありません。 加えて-これは典型的なアプローチであり、したがってよく知られた問題です。 1つ以上のゴルフロボット(ゴルフローバー)-以下GRと呼びます。
以下の典型的なアクションを実行します。
- 地上局から10メートル以内にいるときにミッションを取得します
- 使命を果たす
- 通常のミッション実行の場合、少なくとも1分あたり1回の頻度でテレメトリチャネルについてレポートします
- 地上局に戻る
- 新しいミッションを待っています
- 各ミッションは、次のイベントによって中断される必要があります。
- ボールホッパー充填
- 栄養事故
- 移動不可能(クーデター、突然の障害)
- 緊急時再始動
- 手動ミッション中断
- 各ミッションの中断は、従来のテレメトリおよびバックアップチャネルを介して送信する必要があります
- 中断後-条件が許す場合、GRは地上局に戻ります
なぜなら 地上ステーションは1つでも構いませんが、GRが多数あります。ボールホッパーの充填は緊急事態です。 これにより、2つの問題が同時に解決されます。GSCは、ロボットがステーションに行き、多くの場合バックアップチャネルをテストしたことを高い確実性で認識しています。 また、ミッション中にボールの充填が行われるべきであると想定されており、そうでない場合は、GSCがどこかで計画を間違えたため、修正する必要があります。 直観的には、ロボットをきれいなフィールドで解放したいので、ボールを集めたら戻ります。 しかし、ここで経済が始まります。1〜2人が参加している場合は、ロボットが駅に立ち、ボールがすでに蓄積されたときに動き始める方が良いでしょう。 少ないリソースとエネルギー消費。
1つまたは複数の地上局(地上局)-以下GS。
- 充電中
- ボールホッパー
- GRとの通信
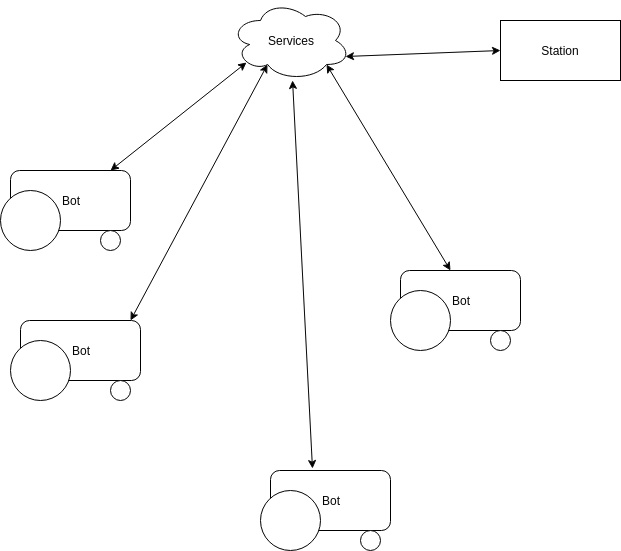
複合体全体のスキームは次のとおりです。
2番目のフェーズは、この複合体全体のリスクと考えられる問題の評価です。
良いことには、リスクとその評価の表を提供する必要がありますが、3つのA4シートはあくびを引き起こすだけです。 面白いスクイーズだけをあげます。
すべての自律クロールローバーの主な問題は、正確な位置を取得するタスクです。 さらに、位置は本当に正確でなければなりません-できれば10〜15 cm以内この問題は小さなモバイルプラットフォームでは実際に解決できないため、安価で大規模な農業/輸送/軍事用ドローンはありません。
どうやら-飛行ドローンの解決策はありますが、地上のすべてを再利用してください。 しかし、Uターンで左または右に10〜15メートル離れた空中でのこれはほとんど何も解決しませんが、地上では事故や災害につながります。 さらに、石は空中の場所を変えず、動物は道路を横断しません。 鳥、はい、しかし、空中にはるかに多くのスペースがあります。
測位はGPS / GLONASSモジュールによって実行されます。これはすぐに2つの結果につながります。測位の精度が高すぎないことと、座標を取得する速度です。 静止試験用のuBlox M8Nモジュールの座標:良好な受信状態で2〜3メートル、悪天候と視界で7〜10メートル。 一般に、ボールを収集するタスクのこのようなエラーはさらに良好です-いくつかのミッションのローバーは、レール上で運転するよりもボールをキャプチャします。 ただし、この場合、壁や大きな石などの障害物の近くに誘導することはできず、これらの領域にはボールが蓄積します。 光学および超音波ナビゲーションシステムが分析されましたが、複雑なフィールドジオメトリでは多数のビーコン/カメラが必要であり、視界ゾーン(フィールドは格納庫の床ほど平らではないことがあります)および困難な気象条件でのそのようなシステムの安定性に問題があることがわかりました(雨、霧)。 現時点では、GPSがすべてですが、予約が必要です。 さらに、GPSの精度をかなり安く上げることができます-RTKですが、壁の問題は解決しません。
ローバーが荷重点に沿って左右に5〜10メートルの精度でクロールする場合、選択したアプローチでは検証が必要であることが明らかになりました。 単純なタスクのためにSLAMと呼ばれる列車に登るのは冗長に思えます。 光学的に明るい物体(Aruco Code)を介してステーションに入ることが明確であり、どれだけのリソースを必要とするかは、フィールド上のすべての可能な物体を分類する問題や境界を見つける問題を解決することはまったく別のタスクです。
フェーズ3の時間です-概念実証
システムのモデルを作成し、現場で実際にテストし、その適用性を評価する必要があります。 開発された要件によると、物事はもっと楽しくなりました:
ソフトウェアローバーとしてArduroverが選ばれました。これは、Arduinoのクワッドコプターのファームウェアとして起動するソフトウェアを積極的に開発しています。 ただし、これまでのところ、RTLコアを備えたLinuxボードをサポートしており、改善の余地があります。 将来、私はそれを終了する必要がありましたが、必要な場合よりも作業をスピードアップするためです。
ローバーの頭脳として、ロボット用の高度に統合されたシステムであるBeagleBone Blueが選ばれました。
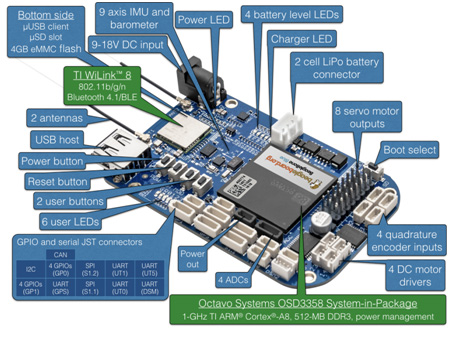
特徴的な機能は、TI Sitara / Octavoチップの使用です。プログラム可能なリアルタイムユニット(PRU)と同じRaspberryと比較して。 これらは2つの独立した200 MHzコアであり、割り込み、スレッド、その他のテクノマジックでメインコアの注意をそらすことなく、鉄をリアルタイムで制御できます。
さらに、プラットフォームにはすぐにWiFi、Bluetooth、バランスケーブル用のはんだ付けコネクタ、Li-Poバッテリーを充電するためのコントローラー、テレメトリーとコンピューターを接続するためのUSBコネクター、サーボモーター用のコネクター、5ボルトと3.3ボルトの電源安定装置、バッテリーごとに1つのチャネルですぐに巻き上げられるADC、複数のUART。 一般的に、ロボットを手に取り、作ります。
Arduroverは問題なく立ち上がった-現時点でソフトウェアからPRUを使用できるのは4.4 LTSカーネルのみです。 新しいカーネルでは、ユーザーソフトウェアからPRUをプログラミングするとSIGBUSフォールトが発生します。JTAGアダプタを注文したardublueブランチの開発者と話をした後、その理由がわかります。 このローバーは人生にまったく干渉しませんが、問題が何であるかを明確に理解したいと思います。
ソフトウェアを使用すると、ベースに到着したときの位置決めを除き、ほとんどすべての要件を実行できます。ここでは、JeVois-A33カメラを使用します。 彼はイベントに関するアラーム信号を送信しませんが、これは別の電源を備えた別のモジュールのタスクです。 電源モジュールは、停電またはクーデターがうまく機能しない場合があります。
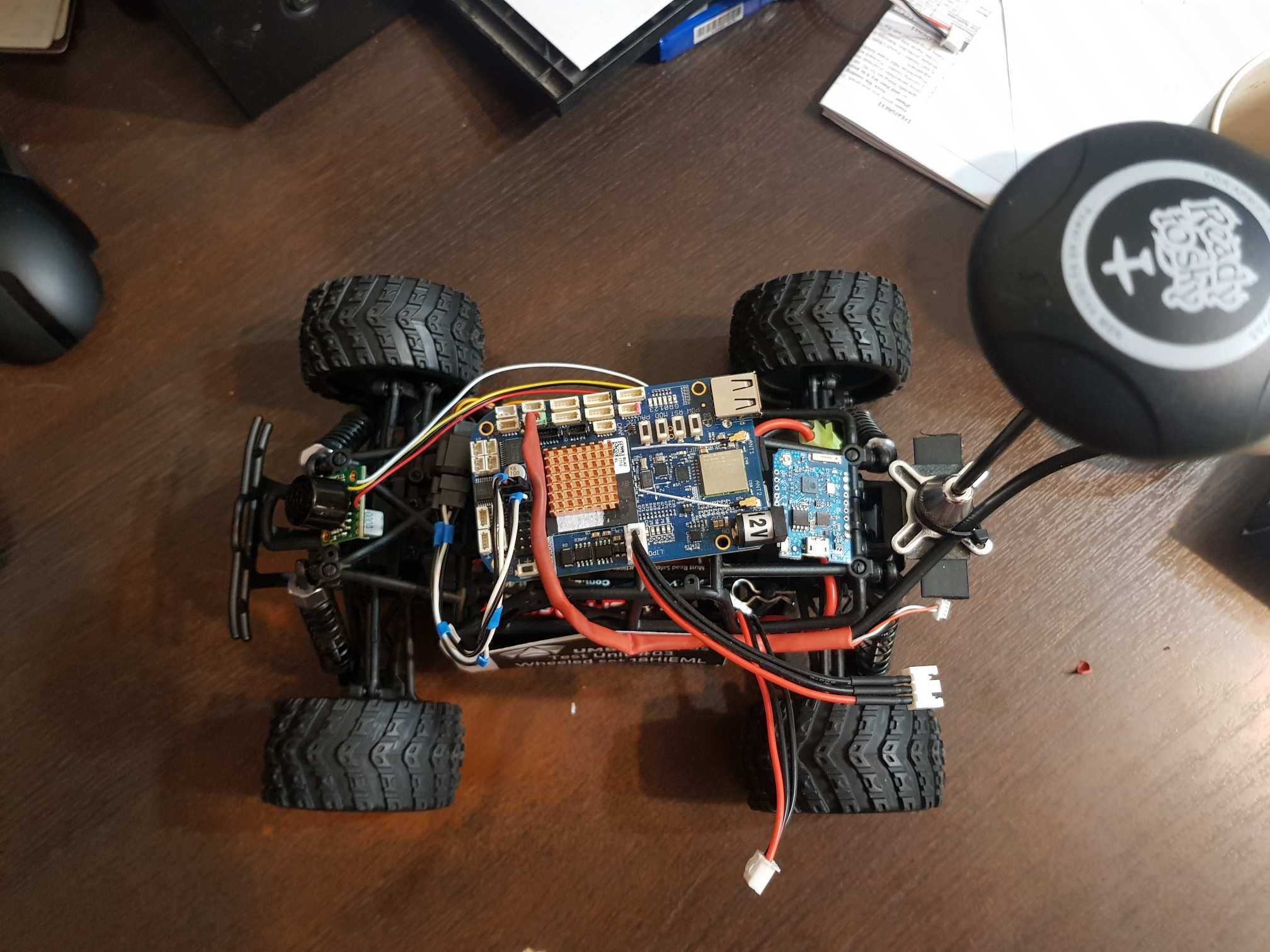
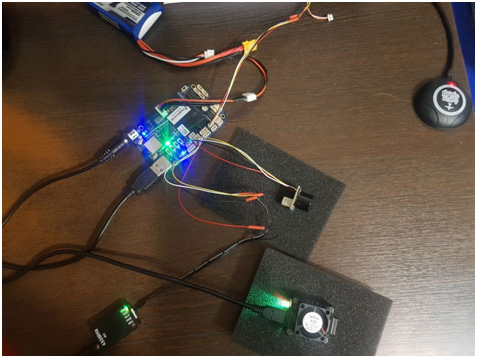
GPS受信機、遠隔測定無線送信機、超音波距離センサーを購入し、マシンビジョンカメラを接続することは残っています。 はんだ付け後、コネクタを接続してテストを実行すると、次のようになりました。
コントロールセンターとして、 ミッションプランナーが使用されます。
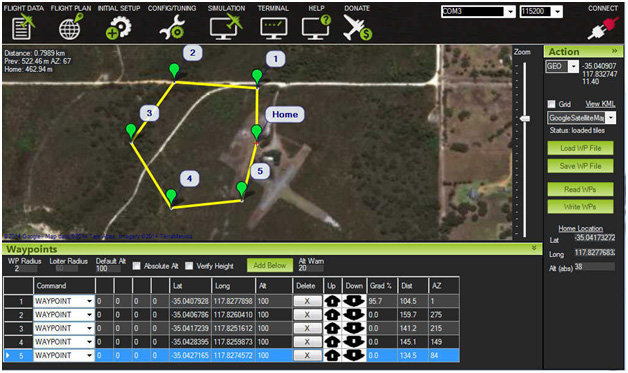
ソフトウェアは議論の余地のないものではありません。ヘリコプターのファンのための100500以上のボタンを備えたスイス製ナイフの代わりに、きちんとしたWebインターフェイスを作成する必要がありますが、デバッグの目的には適しています。 ローバーと通信するために、アダプターのMAVLINKプロトコルを使用し、Java / JS用のアプリケーションソフトウェアは非常に多く書かれています。 もちろん、プロトコルに小さなパケットを入れて、標準のパラメーター参照を維持したいのですが、それはあまりにも良いでしょう。
ローバーのベースとして、1/18スケールのモデルマシンが別々のレシーバーとエンジンコントローラーと共に使用されました。
レシーバーは捨てられ、サーボとモーターのコントローラーのコネクターはバッテリーのようにBeagleBone Blueに直接配線されました。
ばかげていることから-私は子供の頃、はんだ付けがまったくできず、スズのはんだがはんだ付け部位に常にぶら下がっていて、内部の恐怖がなくてはんだごてを取り上げたことを思い出しました。 しかし、ナイフ、ワイヤー、はんだごてが手に落ちるとすぐに、私は刺し傷をうまく整理し、内側の芯に触れずに絶縁体を切断し、手でケーブルの端をねじって、それらを照射し、接続を密封しました。 そして、私は組み込み開発者として働き始め、数ヶ月の間、はんだごてとコミュニケーションを取り始めたことを思い出しました。 私の意見では、「あなたは経験を飲まない」という格言の美しいイラストです。
現時点では、スタンドは次のようになっています。
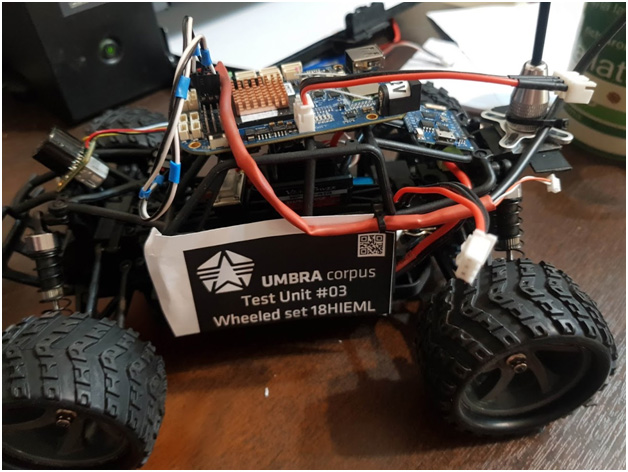
ご覧のように-ハウジングと留め具のないコントローラー。 残念ながら、私はSLS 3Dプリンターでナイロンで印刷するために疑似ハーモボックスを注文しましたが、彼らはまだそれをすることができませんでした。 船体のない純粋なフィールドでローバーを持ち出すために-そのようなバイキングは新鮮な空気の中で30分歩くことができます。 その後、電気化学腐食が終了するか、クーデターブロー後に完全に放出されます。 衝撃と振動を減衰させるためのすべてのルールに従って、ハウジング、圧力シール、ファスナーをお待ちしています。
Arucoコードローバー検出ビデオ
その結果、私は手動制御で自宅でpokatushkiのテストに費やしました。 ベースが正しく選択されていないことが判明しました。加速が速すぎるため、中国のエンジンコントローラーのプログラミングを習得する必要がありました。 2つ目-この中国の奇跡のリバースギアは、2つの「バック」信号によってオンになります。1つ目はブレーキをオンにし、2つ目はすでにリバースをオンにします。 また、信号が速すぎる場合は無視できます-ギアとエンジンのリソースを節約します。 私はarduroverを終えなければなりませんでした、tk。 そのようなトリックは考慮されていません。
次の手順では、ルートを5〜7回ロールバックし、ルートのテレメトリログとGPSトラックを削除します。 加熱されたフィールドのあるサッカースタジアムを見つけたので、雪が降っても大丈夫です。 ローバーは明らかに雪の吹きだまりを掘削しません。そうでない場合、ファイナラネフスカヤは、フィールドホッケーとアイスバレエに加えて、倒錯のリストにゴルフを雪の吹きだまりに追加する必要があります。 もちろん、最も安いエンターテインメントではありませんが、ロシアの他の場所、そして11月には緑の芝生を見つけることができます。 また、速度がはるかに低く(現在のモデルは15秒で20 km / hに加速する)、パッチの三角形ではなくUターンが存在する、追跡シャーシの実装に関する作業も開始されました。 おそらく、数週間以内に、両方のシャーシが同時に慣らされて、障害物検出器と迂回アルゴリズムの動作をテストします。
最後に、本格的なモデルでソリューションをチェックするのは非常に迅速で安価であることに注意してください。 多くのトラブルはかなり早く発見され、さらに、大型ロボットがまだ設計段階またはプロトタイプにある間に、大型ロボットの設計を変更する時間があります。 その後、より高価で長くなり、ノードをリンクする際に何かが壊れます。 さらに、このようなモデルでは、タスクに必要なほぼすべてのソフトウェアを簡単に開発およびテストできます。 理想的には、別のモデルに切り替える必要があるのは、エンジンコントローラープロトコルを新しいものに置き換えることだけです。 さて、動的モデルを変更することは可能です。
さらに、専門的で実績のあるソリューションを使用すると、時間とエネルギーを大幅に節約できます。 独自の高密度回路基板、独自の通信プロトコル、地上ベースのソフトウェアとソフトウェアローバーの開発、障害物回避アルゴリズムのデバッグ、中国のエンジンコントローラーとの通信は確かに非常にエキサイティングですが、この場合、半年を長くてでこぼこした道にすぐに追加できます。 すでに誰かが合格しました。
あなたの助けが必要です:
- ROSバージョンで作業する準備ができている場合。
- raspberry piおよびorange piバージョンのモジュール接続ボードの準備が必要
- 特に、ゴルフを積極的にプレーしている国に住んでいる場合は、ドライビングレンジテストを支援してください。
- 法的問題、国からのロボットの輸出、特許法、立法設計要件;
- スタートアップのパッケージング、投資の検索に関するサポートが必要です。 私たちは順調に発展しており、投資なしで行動計画を立て、チームを結成しています。 お金を投資するのではなく、商業的に成功するプロジェクトを開発する経験と能力が必要です。
プロジェクトの現状
ボディの2番目のバージョンを準備しています。 1週間以内に、ケースは真空成形で準備できます。これについては、別の投稿を作成します。
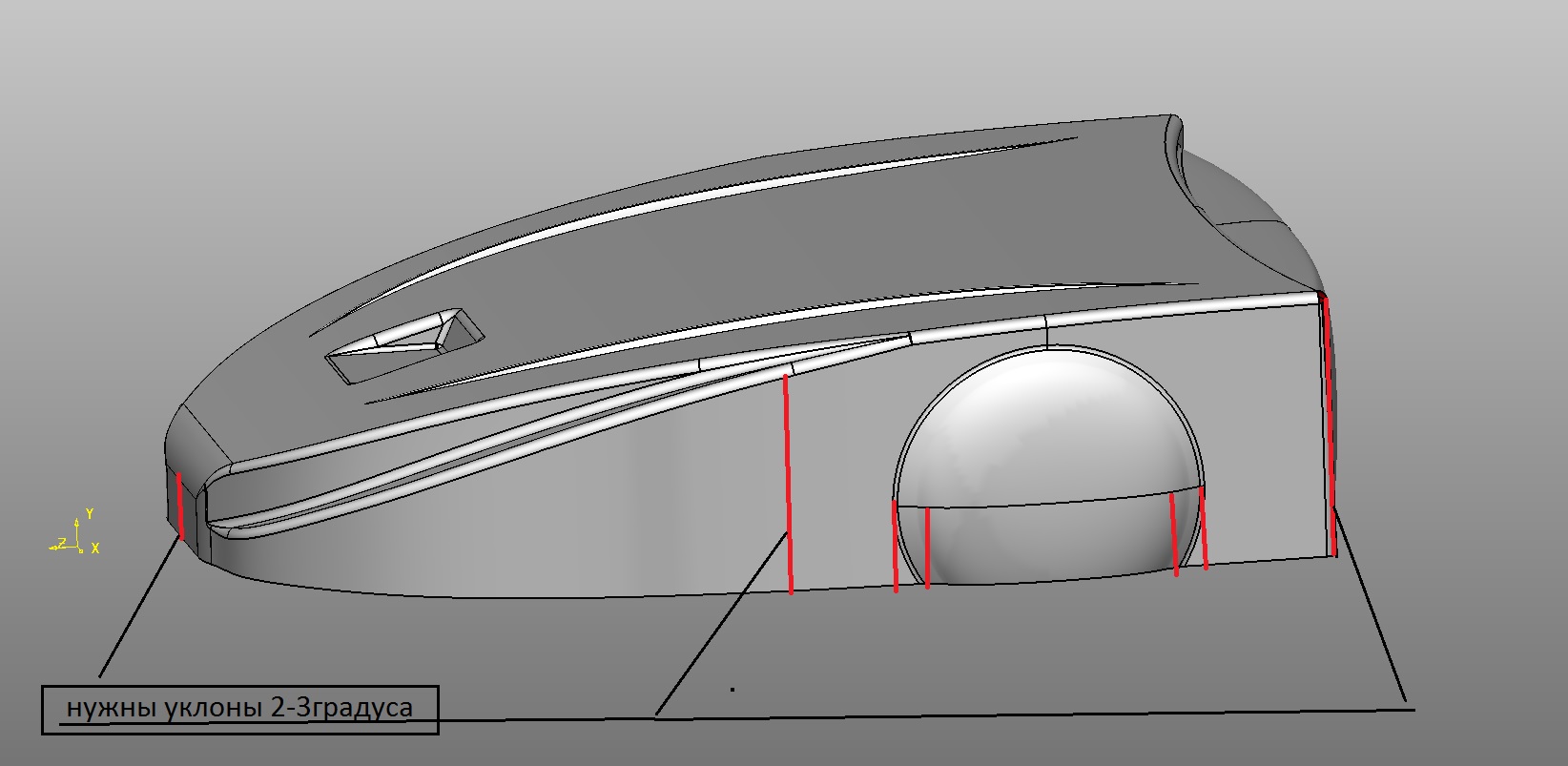
本体の下部は、複合材料をフライス加工して作られています。

ボディとメカニクスはNikitaKhvorykによって設計されています 。 私たちは、 n12eq3の raspberry piとorange piのバージョンのモジュール接続ボードに支払うのを長い間待っていました。 Ardupilot Vladimir Goncharov Shadow_ruのバージョン
Process0169 、 Trif 、 tersuren 、 vasimv 、 vovaekb90 、Vyacheslav Soldatov、Levon Zakaryan、Sergey Pomazkin、Vladi Kuban、Karen Musaelyan、Alexey Platonovに支援とアドバイスを提供してくれたことに感謝します。 手伝いたい場合は、PMまたはVK 、 FBで私に書いてください。
計画:
ロシア、ドイツ、ラテンアメリカ、ニュージーランドのゴルフクラブでテスト用のロボットを配置することについて予備的な合意があります。 近い将来、私たちはアルゴリズムと設計を完成させ、モスクワでテストを実施し、改善を行います。 5つのロボットを作成し、新しいシーズンの長いテストのためにゴルフクラブに無料で配置します。
読んでくれてありがとう、そして私たちを完全に批判してくれてありがとう。