「編集者が説明したように」読者は理解できます。読者を楽しませる、新鮮で、面白い冒険に満ちたものでなければなりません。
I.イルフ、E。ペトロフ「ロビンソンの作成方法」
他のソフトウェアまたはハードウェアプラットフォームと同様に、Arduinoの使用を開始することは、実際のプロジェクトからは常に興味深いものです。 同時に、プログラマーは「Hello、world」と表示するコードを書き、専門家はLEDを点滅させます。 そして誰もが子供のように幸せです。
私は、若い世代をCounter-Strikeから引き離すという秘密の希望を含む、高度なプロジェクトから始めることにしました(うまくいきませんでした)。
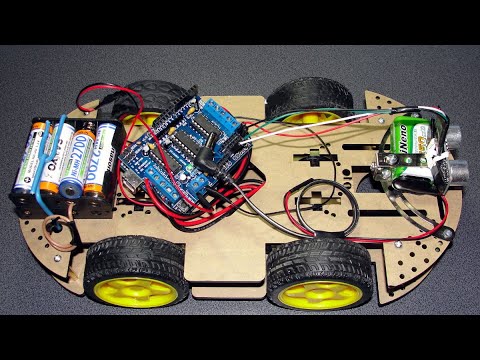
RoboCar4Wという名前から推測できるように、最初のプロジェクトは4輪ロボット車でした。 仕事を始めて、私はすでにプログラミングの経験があり、長い間はんだ付けする方法を知っていましたが、Arduinoのピン配列さえまったく知らず、ドキュメントをまったく読みませんでした。 私は劇中のすべての知恵とGoogleを支援するために勉強しました。
プロジェクト自体は基本的に新しいものではないので、ネットワーク内のそのような記述で十分であり、すべてのコンポーネントが既知であり、驚きは予想されていませんでした。 したがって、アイデアは最も一般的な用語で定式化され、主な目標は、ラピッドプロトタイピングのプラットフォームとしてArduinoを使用して「物事の世界」に没頭することでした。 この作品では、おそらく誰かが旅の始まりに自分自身を認識します。
すべてのハードウェアはebayで購入しましたが、私自身の経験から、詳細に組み立てるよりも、すぐにスターターキットを購入する方が簡単だと言いたいです(Arduinoスターターキットの言葉で探してください)。 はい、すべて一緒に来ます。 通常のシャシー、通常のホイール、通常のモーターを購入するために、それは「高価」であるように、ささいなことをしないと決められました。
eBayでの成功した購入の主な秘密は、一流の売り手から購入すると同時に、製品の説明を注意深く読むことです。 これに関する多くの記事がインターネット上にあります。
Arduinoファミリーのどのボードを選択しますか?
私はArduino UNO、それについての説明を含む多くのプロジェクトを取り上げました。 しかし、今はArduino Mega 2560を使用します。これには、デジタル出力とアナログ出力が多く、UNOとのプロジェクトで完全な互換性があります。
プロジェクトの一般的な説明
ソフトウェア開発の世界では、これは「システム要件」とも呼ばれます。
プロジェクトのアイデアは次のとおりでした。 RoboCar4Wと呼ばれるロボットマシンの最初のバージョンは、単純なアクションを実行する必要があります。
- 前進、後退、ターンを行う
- 障害物までの距離を測定する
- 前方の障害物を自動的に回避できるようにします。
マシンの2番目のバージョンは、AndroidスマートフォンからBluetooth経由で手動で制御する必要があります。
ここで作業した方がよいのは、最終的なRoboCar4Wプロジェクト全体です(ここではbluetoothなし)。

これが海上試験のビデオです。
最初のビデオでは、RoboCar4Wは「ファームウェア」の2つの異なるバージョンで障害物を回避して自動的に運転します。 したがって、誰かが最も熱心で、異なるエピソードでのロボットの動作がわずかに異なることに気付いた場合、スケッチします。
2番目のビデオでは、RoboCar4Wは、Androidの携帯電話からBluetoothを介して「ドライバー」が送信するコマンドの助けを借りて移動します。 「Bluetooth RC Car」が電話機にインストールされています。 さらに、障害物が正面にある場合、ロボットは停止します。 何も叩くことができません(ただし、セーフモードを無効にする「秘密」ボタンがあります)。

3番目のビデオでは、RoboCar4Wは事前にプログラムされたターン付きデモ移動プログラムを示しています。 デモプログラムは、同じAndroid携帯電話からのコマンドでアクティブになります。 ロボットはしばらくの間ただ乗ってターンします。

モーション制御アルゴリズム
このメソッドを「障害物回避アルゴリズム」または「パス検索」と呼ぶのは誤りです。 これらは個別の数学の分野、純粋な数学です。 あなたが本当に本当に数学が好きなら、これらのフレーズをグーグルで検索すると、6ヶ月間読書が提供されます。
それまでの間、私たちはもっと簡単なことに興味を持っています。 したがって、4輪ロボットの動きを制御するためのアルゴリズムと呼ばれます。 もちろん、人間の介入なしの自動制御について話している。
単語で記述されたこの単純なアルゴリズムは次のとおりです。より複雑なアルゴリズムでは、ブロック図を作成する必要があります(必要かどうかは関係ありません)。
同時に、スケッチRoboCar4W-1.inoのソースコードを見てください 。
- 前方の障害物までの距離を測定します。
- この測定された距離が
DST_TRH_BACK
値(距離のしきい値の短い)よりも小さい場合は、停止し、旋回中に逆方向に進みます。 回転方向は次のように選択されます。以前に左に曲がった場合は、右に曲がります。 - 測定された距離が
DST_TRH_BACK
より大きく、DST_TRH_BACK
より小さい場合は、単に回転します。 回転方向はランダムに選択されます。 - 障害物が遠い場合は、先に進みます。
- もう一度繰り返します。
4つの車輪と四輪駆動を備えているのは何が良いですか? いくつかの種類のターンを実行(プログラム)できます。
- スムーズな回転。 すべての車輪が回転しますが、片側の車輪はより速く回転します。
- 急旋回。 車輪は片側だけで回転します。
- 所定の位置にUターン。 トラクターのように、一方の車輪は後方に、もう一方の車輪は前方に回転します。
プログラムの2番目のバージョンでは、Androidスマートフォンから制御する場合、プログラムが2回押されると、ロボットが正面衝突を防止しようとするセーフモードをオフにできます。

一度押すと元に戻ります。
重要な注意事項 。 すべてのロジックはArduinoの制御下にあります。 ここでのAndroidは、コンソールから(脳のない)ゲームコンソールのように動作し、そのタスクはBluetoothを介してArduino RoboCar4Wにボタンの押下(つまりコマンド)を愚かに送信することです。
コンポーネント
当初、機械には、3方向の測定のために超音波距離計を特定の角度に回転させるサーボドライブが含まれていました。 しかし、テスト中、不注意な取り扱いのため、サーボドライブが焼損したため、距離センサーは単純にケースの前にしっかりと固定されています。
銀色の裏地はありませんが、スケッチは少し簡単になりました。
将来的には、最もシンプルで安価なサーボを購入します。特定の角度での特別なパワー、速度、回転精度は必要ありません。サーボが無効になるのは簡単です。 SG90は2ドルの価値があります。
そのため、RoboCar4Wプロジェクトのコンポーネントは、ebayなどでの検索を容易にするために英語で説明されています。
- Arduino UNO R3
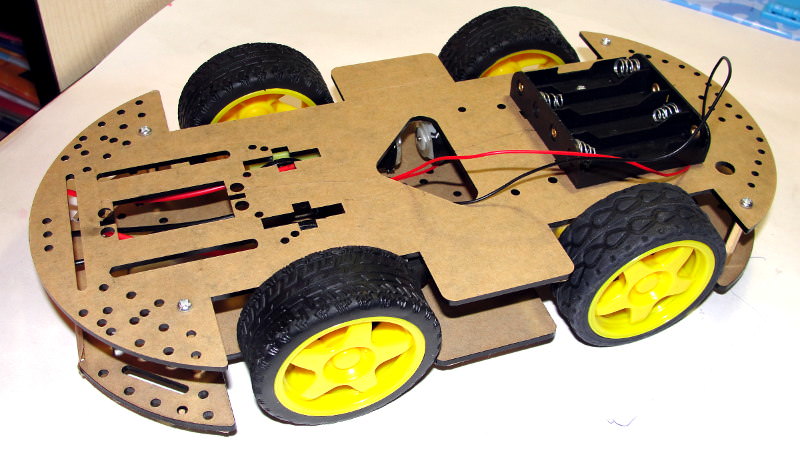
- 既製のシャーシ4輪駆動モバイルロボットプラットフォームスマートカーシャーシArduino互換
- 両方向に回転するDCモーター-4個
- ホイール-4個
- 4つのDCモーターを制御するためのボードモータードライブシールドL293D
- 超音波距離計HC-SR04超音波モジュール距離測定センサー
- バッテリーNi-MH 1.2 V-8 pcs。
- バッテリー用プラスチック製ボックスホルダー、バッテリーボックスホルダー4 AAバッテリー-2個。
- バッテリータイプ「Krona」8.4 V-1個
- オプションのトグルスイッチ-電源スイッチ
シャーシ、DCモーター、ホイールはキットに含まれており、組み立て説明書も含めてすぐに購入しました。
ピン配列
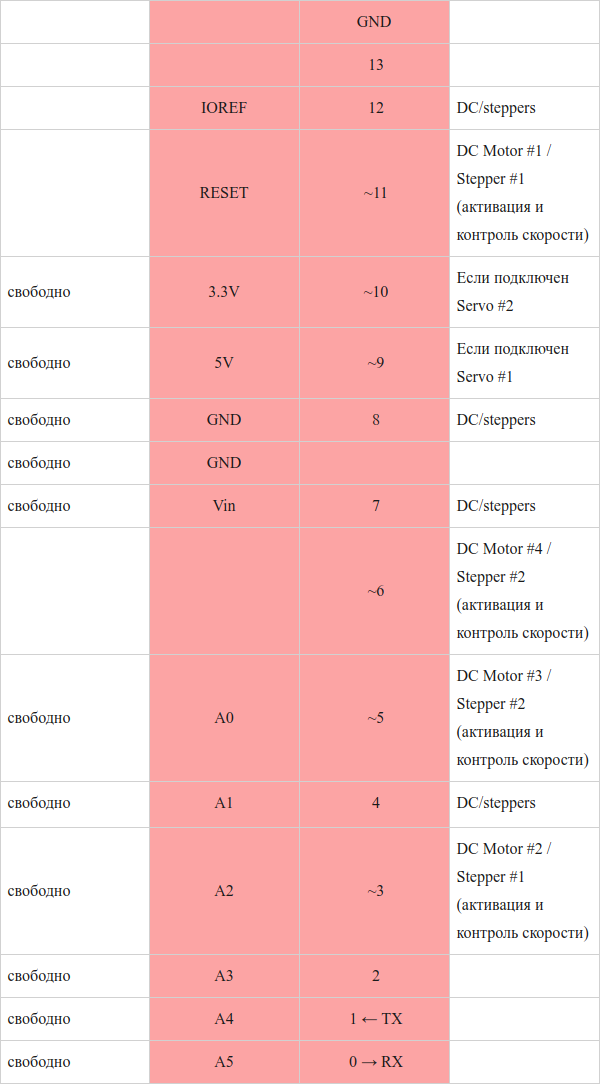
アナログ入力は、I / Oポートのデジタルピンとして使用できます。 アナログ入力に対応するArduinoピンには14〜19の番号が付けられています。これはArduinoピンにのみ適用され、Atmegaマイクロコントローラーの物理ピン番号には適用されません。
絵を描く必要はありません。すべてをテーブルに入れるだけです。 私はこのようにしました。
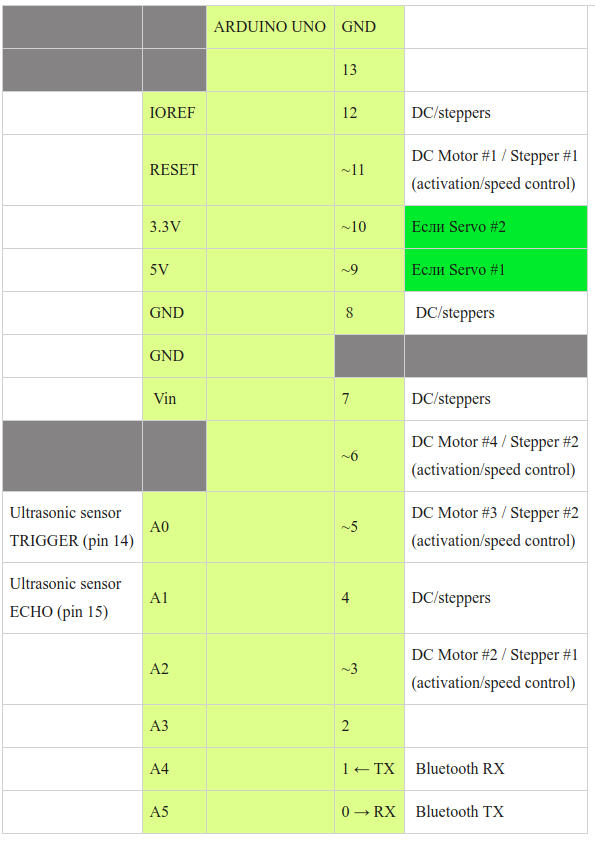
DCモーターまたはステップモーターが使用されている場合、ピンD4、D7、D8、D12はビジーになります。
ピンD9(サーボ#1制御)、D10(サーボ#2制御)は、サーボモーターが使用されている場合にのみ占有されます。
Arduinoピンは、モータードライブシールドL293Dを制御するためのArduinoピンを占有しません。
電源ピン3.3 V、5 V、およびグランドは、十分な量でモータードライブシールドに複製されます。 したがって、彼らの不足を心配する必要はありません。
それでも美しく描画したい場合は、無料のFritzingプログラムが役立ちます。
栄養
これが2番目の非常に重要なポイントです。 多くは栄養に依存します。 たとえば、特定の角度でシャフトを回転させると、サーボモーターは多くの電流を消費し始めます。 同時に、サーボが5 V Arduinoで駆動されている場合、電圧に「低下」が生じ、回路の残りの部分が故障し始め、Arduinoは同時に再起動することさえできます。
いずれにせよ、クラフトでモーターを使用する場合は、モータードライブシールド(または同様の回路)が必要です。
したがって、4つのDCモーター、サーボドライブ、Arduinoボード自体、およびいくつかのセンサーがあります。 モーターは最も食いしん坊ですが、センサーはArduinoボード自体のコネクタから正常に電力を供給できるため、すべてがシンプルです。 便宜上、1つの表で経済全体を削減しました。
| 推奨または標準電圧。 消費電流 | 最大電圧 | 給餌予定 | 注釈 | |
|---|---|---|---|---|
| Arduino UNO R3ボード | 7-12V、200mA(平均) | 6-20 | 「クローナ9V」リチウムイオン650mAh、8.4V | センターコネクタ |
| サーボモーターMG-995 | 5-6 V、0.1-0.3A(ピーク) | 4.8-7.2 | バッテリー(5)個 Ni-Mh 1.2V = 6V | 別のソースからのみの食品。 Arduinoとともに電源を投入すると、すべてが失敗します。 4本のNi-Mhバッテリー電圧 * 1.2V = 4.8Vでは不十分です。 このサーボは6ボルトでのみ使用すべきではないと主張する人もいます4.8 |
| DCモーター(4個) | 6-8V、電流70mAから250mA | 3-12 | バッテリー(5 + 3)個 Ni-Mh 1.2V = 9.6V | 通常の9Vバッテリーからエンジンを始動することはできないため、時間(およびバッテリー)を無駄にしないでください! |
| モーター駆動シールドL293D | 不要 | 4.5-36 | 不要 | |
| BluetoothモジュールHC-0506 | 3.3 V、50 mA | 1.8-3.6 | ピン3.3V Arduinoボード付き | |
| 超音波距離計HC-SR04 | 5 V、2 mA | 5 | ピン5V Arduinoボード付き |
私はDC / DC電圧コンバータを持っていませんでした。 Krona 9Vはあまり良い電源ではありませんでした。すでに持っていました。
しかし、私はリチウムイオン大容量バッテリーの使用を拒否しました。 第一に、コストが高いため、第二に、中国のオンラインショッピングでは偽物に陥りやすい。 より正確には、「簡単」ではなく「常に」です。 さらに、リチウムイオンは特別な取り扱いが必要であり、安全ではありません。
したがって、表からわかるように、3つの独立した電源が必要です。
- Arduinoボードおよびセンサー用。
- サーボモーター用。
- 4つのDCモーター用。
どこで入手できますか? いずれにせよ、Arduinoボード自体は別の電源から電力を供給される必要があります。 たとえば、モーターの電源を入れたときに電圧が「低下」した場合、ボードが再起動するか、単に故障する可能性があります。 ここでは、Krona 9Vフォームファクターのバッテリーを使用しており、Arduinoに接続するコネクターは「中心にプラス」が付いている必要があります。
サーボモーターと4つのDCモーターの場合、1つの電源で実行できます。 唯一の問題は、サーボモーターが電圧5〜6V(最大7.2V)および電流100〜300mA(ピーク)用に設計されており、DCモーターが6〜8V(最大12V)および電流250mAを必要とすることです。
問題を解決するために、DC-DCコンバーターがありますが、私はそのようなものを持っていませんでした。 その結果、「独自の」配線図を適用しました(ステップダウン電子回路なしで、環境に優しい電圧と電流のみ!):8個接続しました。 図に示すように、直列の1.2Vバッテリーと正しい場所にタップを作成しました。
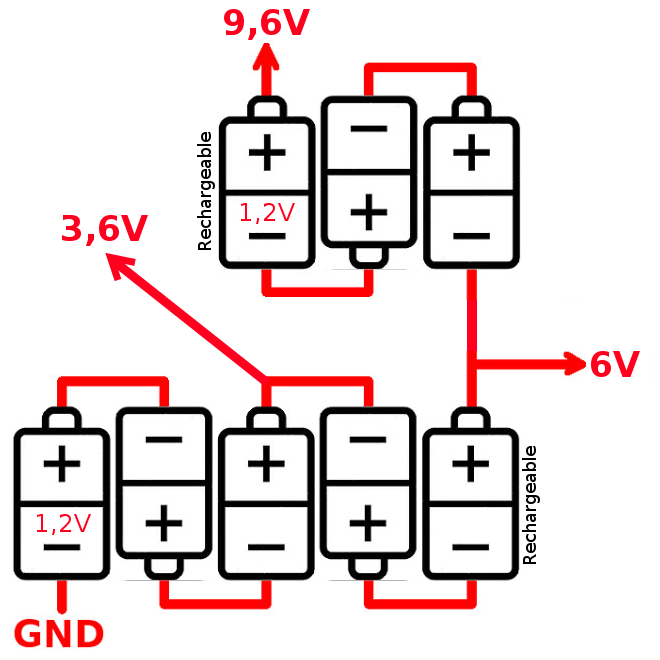
6Vはサーボモーターに行き、9.6はDCモーターに行きました。 バッテリー1〜5の負荷が増加することは明らかです。
サーボモーターとDCモーターを制御するために、L293Dチップに基づく4チャンネルのモータードライブシールドを使用しました。
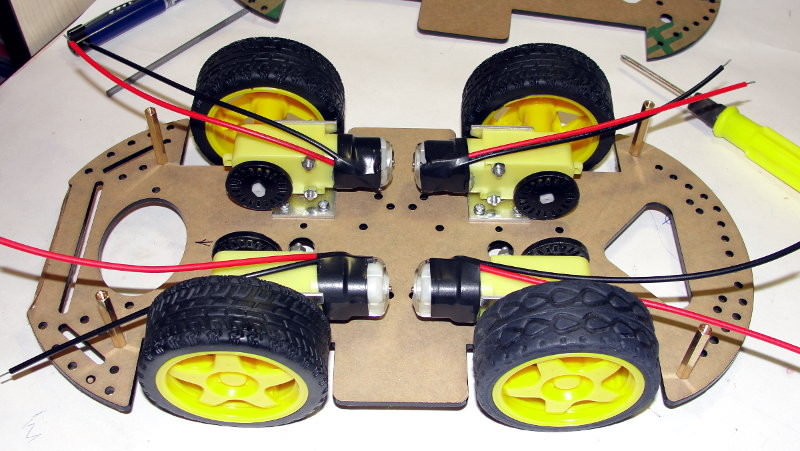
組立
完成したシャーシの組み立ては小さな問題です。 しかし、すべてを完了することなくすぐに集まるとは思わないでください。 したがって、ファイルを準備します。
通常、複数のモーター、サーボモーター、またはステッパーをArduinoに直接接続することはできません。 Arduinoのピン(結論)は低電流です。 この問題を解決するために、追加のドライブ制御モジュールがあります-L293Dチップに基づくモータードライブシールドは、この目的のために設計された最も一般的なチップの1つです。 L293Dチップは、Hブリッジとしても知られています。
2つのL293Dチップとシフトレジスタに接続するための4つのチャネルを提供するボードを使用しました。 eBayで5ドルで購入。
このドライブ制御モジュールボードには次の特徴があります。
- Arduino Mega 1280および2560、UNO、Duemilanove、Diecimilaと互換性のあるL293Dモータードライブシールド
- 4チャンネル制御
- 4.5V〜36Vの電動モーター
- チャンネルあたりの許容負荷電流600mA、ピーク電流-1.2A
- 過熱保護
- サーボモーターを5Vの電圧に接続するための正確なArduinoタイマー(「ジッター」はありません)との2つのインターフェース、供給電圧をより高くする必要がある場合は、以下に説明するように電源接続をやり直す必要があります
- 4つの双方向DCコレクターモーターまたは2つのステッパーと2つのサーボモーターを同時に制御できます
- 4つの双方向DCモーターは、それぞれ個別の速度選択のために8ビットバスに接続されています
- 1つのコイル、2つのコイル、または交互のステップを備えた、最大2ステップのドライブ(ユニポーラまたはバイポーラ)の接続
- 制御ロジックとモーターの個別の電源用の外部ソースを接続するためのコネクタ
- Arduinoボタンのリセット
- Adafruit AFMotorライブラリは管理に使用されます。
モータードライブシールドには、後から何でも接続できるように少し改良する必要があります。 必要なコネクタを上部にはんだ付けしました。これが何が起こったかです。

モーターは、Arduinoボードに対して追加の電源に接続できます。 この接続方法をお勧めします。 これを行うには、図に示すようにジャンパーを取り外して開きます。
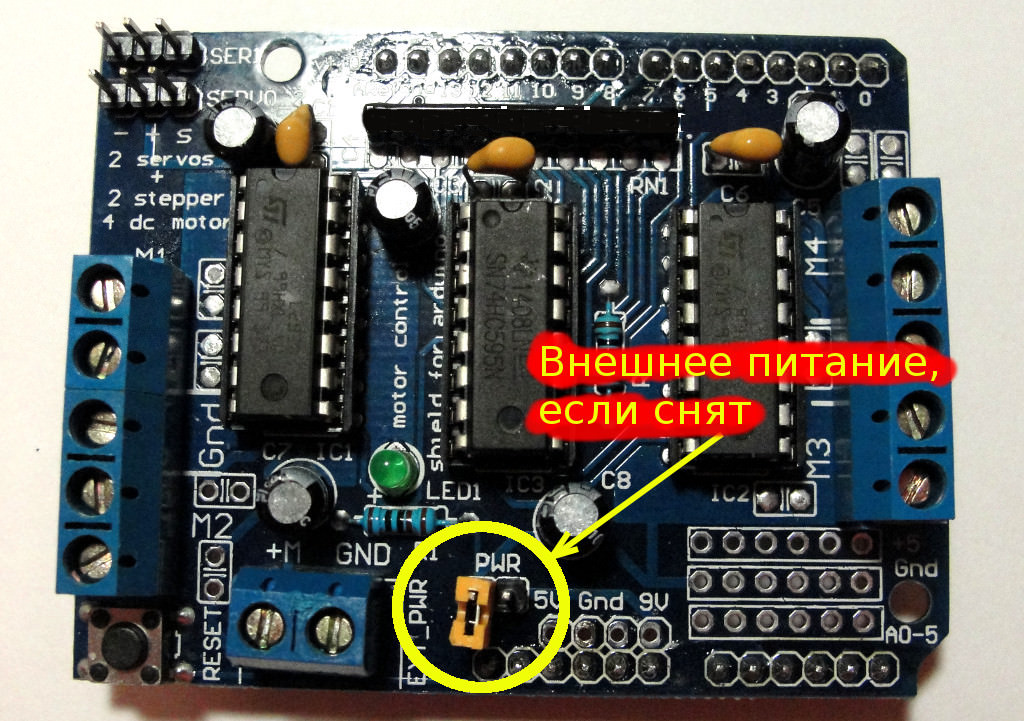
この場合、Arduinoに電力が供給され、モーターは互いに独立して電力が供給されます。
モーターに電力が供給されている場合、モーターシールドのLEDが点灯します。点灯していない場合、モーターは動作しません。
新しい問題。
パワージャンパーの位置はサーボには適用されません。サーボは5V Arduinoで駆動されます。 サーボモーターは通常多くの電流を消費し、電力が不十分な場合、デバイス全体が故障し始めます。「最良」の場合、サーボドライブのみが故障します-所定の角度で回転しないか、各ターンが最初に0度になる前に常に回転します与えられた角度で(そしてあなたが追いつくことができるなら)。 そのため、追加の電源からもサーボに電力を供給することをお勧めします。 これを行うには、接続図をわずかにやり直す必要があります。標準コネクタからプラス線(通常は赤)を噛み、電源のプラスに直接接続します。

モータードライブシールドを接続する場合、アナログピンは使用されません。 デジタルピン2、13は使用されません。
次のピンは、対応するDCモーターまたはステッピングモーターが接続されて使用されている場合にのみ使用されます。
- D11:DCモーター#1 /ステッパー#1(起動と速度制御)
- D3:DCモーター#2 /ステッパー#1(起動と速度制御)
- D5:DCモーター#3 /ステッパー#2(起動と速度制御)
- D6:DCモーター#4 /ステッパー#2(起動と速度制御)
DC /ステッパーが使用されている場合、これらのピンはビジーになります:D4、D7、D8、D12。
次のピンは、適切なサーボモーターが使用されている場合にのみ使用されます。
- D9:サーボ#1コントロール
- D10:サーボ#2コントロール
Motor Drive Shieldを開始するには、 Adafruit AFMotorライブラリをダウンロードしてインストールする必要があります。
モーターを制御するためのサンプルコード:
#include <AFMotor.h> // Adafruit #include <Servo.h> // AF_DCMotor motor(1); // , DC Motor Shiled , , frequency Servo servo; // servo.attach(10); // 9 10 ( Motor Shiled) motor.setSpeed(speed); // DC 0 () 255 ( ) motor.run(RELEASE); // DC motor.run(FORWARD); // DC motor.run(BACKWARD); // DC servo.write(90); // 90 .
DCモーターが回転を開始したのは、100を超える速度を示したときだけでしたが、それよりも小さい場合は、ただ音がしました。 モーターの最低速度を実験的に決定する必要があります。
M1およびM2に接続されているモーターの場合、周波数を設定できます:MOTOR12_64KHZ、MOTOR12_8KHZ、MOTOR12_2KHZ、MOTOR12_1KHZ。 最高の回転速度は64KHzで達成されます。この周波数は聞こえますが、1KHzでは周波数と速度が低くなりますが、エネルギー消費も少なくなります。 モーター3および4は常に1KHzで動作し、他の値は無視されます。 デフォルトはどこでも1KHzです。
その後、モーターのテストを実行する必要があります。 テスト用のスケッチはこちらから入手できます 。 スケッチの最初に、タイプの行(または行)でモーター番号を変更します。
AF_DCMotor motor(…);
しばらくスケッチすると、ロボットの動きに沿ってモーターが前方に回転し、その後に戻ります。 モーターがその方向に回転するかどうかを注意深く確認し、必要に応じて接続の極性を変更します。
超音波距離計HC-SR04超音波モジュールを接続します。 ピン配列:
- Vcc
- トリガー(T)
- エコー(r)
- GND
超音波距離計が測定に費やした時間(実験的に決定):
- 距離が長すぎる場合(範囲外)は最大240ミリ秒
- 距離が短すぎる場合は少なくとも1 ms
- 1.5 mの距離は約10 msで決定されます

超音波距離計センサーは、その物理的性質によるものであり、中国ではないため、障害物までの距離を十分に判断できない場合があります。
- 障害物の形状が複雑な場合、超音波はさまざまな角度で反射され、センサーは間違っています。
- 超音波は布張りの家具やおもちゃによって完全に吸収されます(つまり、反射されません)。センサーは、その前に何もないと考えています。
言い換えれば、超音波距離計の場合、すべての障害物が超音波放射の方向に垂直な固体平面の形であると理想的です。
一部の問題は、赤外線距離センサーで解決できます。 しかし、それも完璧ではありません:
- 超音波と比較して小さな最大範囲:0.3 mから0.8 m対4 m
- 超音波に比べて長い最小距離:10 cm対2 cm
- センサーの感度の全体的な照明への依存。
これらのレンジファインダーをペアでインストールすると、作業の効率が大幅に向上します。
Bluetooth HC-05を接続する
データシートからわかるように、「裸の」HC-05のメインピン:
- TX(ピン1)伝送
- RX(ピン2)受信
- 3.3V(ピン12)電源3.3V
- GND(ピン13)グランド
- PIO8(ピン31)モードインジケーター
- PIO9(ピン32)接続ステータス、接続が確立されると、出力は高くなります
- ATコマンドモードを有効にするPIO11(ピン34)
モジュールは分圧器が既にあるブレークアウト/ベースボードにはんだ付けされているため、3.3V〜6Vの動作電圧範囲を持っています。
Bluetoothモジュールアセンブリを接続します。
- Arduino(TX)-(RX)HC-05
- Arduino(RX)-(TX)HC-05
- Arduino(+ 5V)-(VCC)Bluetooth
- Arduino(GND)-(GND)Bluetooth
- LED、KEYピンは使用されていません
Bluetooth HC-05モジュールに電源が供給されると、LEDが点滅します。これは、Bluetoothが機能していることを意味します。
モバイルでBluetoothをオンにし、HC-05という名前のデバイスを見つけて、パスワード1234を接続します。
テストのために、Arduinoで簡単なスケッチを記入します。
int count = 0; void setup() { Serial.begin(9600); Serial.println("Test Arduino + Bluetooth. http://localhost"); } void loop() { count++; Serial.print("Count = "); Serial.println(count); delay(1000); }
Androidフォンで、Bluetoothターミナルをインストールします。 私たちはHC-05デバイスに接続されており、カウンターの増加とともに電話スクリーンのクリープラインを観察しています。
モジュールがATコマンドを受信できるように、適切なモードにする必要があります-これを行うには、KEY出力(PIO11)を論理1に設定します。一部のBreakout / Base Boardでは、KEY出力の代わりに、EN(ENABLE)出力があります。チップ自体のピンにはんだ付け。 これは、HC05チップにのみ適用されます。 それはちょうど私のEN端子出力がどこにもはんだ付けされていないということです。 したがって、チップの端子KEY(PIO11)に別のワイヤではんだ付けできます。 または、操作中にHC05をATコマンドモードにするには、KEYチップ(PIO11)の出力をVcc電源出力に数秒間短絡させます。 HC06の場合、KEYピンは必要ありません。
ソフトウェア
ご注意 Arduinoにプログラムをダウンロードする前に毎回、BluetoothモジュールがArduinoに接続されていないことを確認してください。 これにより、スケッチ塗りつぶしの問題が発生します。 BluetoothモジュールまたはArduinoとRX、TXモジュールのピンを接続しているワイヤから電源を切断するだけです。
スケッチの最初で、タイプの行のモーター番号を変更します。
AF_DCMotor motor(…);
障害物回避機能付き自動モードのスケッチはこちらからダウンロードしてください 。
文字列を置き換える場合
byte debug = 0;
に
byte debug = 10;
これにより、デバッグモードが有効になります。
デバッグモードでは、RoboCar4Wは実際には駆動もホイールもしません。 代わりに、シリアルポートモニターをアクティブにすると、仮想モニターがどのように「駆動する」かがわかります。 実際に前進する代わりに、「Forward」という文字列がシリアルポートモニターに書き込まれ、左に曲がって「Turn Back L(eft)」などのように反転します。 超音波距離センサーも何も行いません。代わりに、障害物までの距離がプログラムでランダムに生成されます。
このデバッグモードは、動きのアルゴリズムを変更し、部屋の周りでタイプライターを捕まえる代わりに、アイドル状態ですべてをチェックする場合に便利です。
手動制御用のBluetoothスケッチはこちらからダウンロードしてください 。 スケッチにはすべてが透過的であるため、デバッグモードがありません。 あなたはボタンを押す-ロボットは行く。
Adnroid Bluetooth RC Carのプログラム 。
さて、それだけです! 素敵な旅行を!
