1.はじめに
2002年にプラハに住んでいたラジコン飛行機に夢中になりました。 最初の飛行機の翼幅は1.2 mで、2ストロークエンジンICEでした。 これが当時のビデオの断片です 。 2008年に一度、ADXL202E加速度計が私の手に落ちました。 MCS-51ファミリーコントローラー(ルビジウム周波数標準およびデータ収集システム)でデバイスを開発した経験があるため、Mentorラジコンモデルの自動操縦装置を作成することにしました。 まず、加速度計をコントローラーに接続しました。 簡単にするために、AT91SAM7コントローラーを備えたデバッグボードを選択しました。 インターネット上の自動操縦については何も学ぶのではなく、もっと面白くするために「0」ですべてを自分でやることにしたことに注意してください。

そのため、偶然、2008年に偶然飛行機に乗って、加速度計を搭載したラップトップとハンカチを使用できるようになりました。 今日、すべての所有者
タブレットやスマートフォンはそのような実験を自分で行うことができます。
加速度計は、ほぼすべてのデバイスで使用できます。 それは私が自分のために私の最初の「発見」をした場所です 加速度計を使用してピッチを安定させることができます(飛行機が速度を上げたり、速すぎたりすることはできないため)が、ロールを安定させるのには適していません。 スリップすることなく正しい方向に旋回するため、横方向の加速度は飛行機のロールによって補正され、加速度計はそれらを感じません。 映画Yolki-2を覚えています。この映画では、飛行機のロールがコップ1杯の水で監視されていましたが、実際のパイロットには戸惑うでしょう。 なぜ地平線を発明するのですか?
ですから、これらの記事では、私が自由時間にこのプロジェクトを行っていた2008年から2017年までに得たものについて説明します。 2012年6月、オートパイロットは実際に1回テストされました。 その後、まだGPSなし。 2017年には、GPSを使用して既にいくつかのテストが実行されました。 スローモーションで成功しましたが、GPSで自分の位置を見つける時間がありません。 開始は、リモートをオフにすることです。 離陸は完全に自動化されており、飛行機が間違った方向に飛んでいることが明らかになったときに、制御を試みます。 GPSが現在から約1 kmの座標を決定することがわかりました。 ルート10/17/2017での別の成功したフライト。 射撃は失敗しますが、離陸と着陸は見えます。 バッテリーの放電によるフィールドへの着陸。 しかし、美しい。 フライト全体が完全に自動化されています。 開発は、Borland C ++ BuilderとフライトシミュレーターXPlane 6を使用した自動操縦のプログラムモデルの開発から始まりました。その後、プログラムコードはほとんど変更なしでコントローラーに適合しました。 自動操縦は、標準の無線制御モジュールとの単純なドッキングに向けられています。 最適なモードが選択されたため、PPM(パルス位置変調)。 今日のPPMでさえすべての最新のリモコンで動作するわけではありません。PPMパルスシーケンスは、FlySky FS-16などの最新のリモコンのように同時に起動するのではなく、連続して実行する必要があります。 このようなリモートからの制御ソリューションもソフトウェアに含まれていますが、まだテストされていないため、デバッグする必要があります。 システムは、Robbie Futaba FC-16およびArt-Tech EFLY-100Bリモコンでテストされています。 欠点の1つは、受信機の腸からPPM信号を、ステアリング機のパルス分配器であるデコーダーに直接出力する必要があることです。
2.ハードウェアとソフトウェアのモデル
自動操縦の機能図を図1に示します。 自動操縦の中心はLEVEL1ユニットです。 このモジュールは優先度の高い機能であり、46.875ミリ秒ごとに(15.625ミリ秒のテスト済みバージョン)他のイベントとは独立して実行されます。 そのタスクは、航空機を正しい飛行位置に保つことです
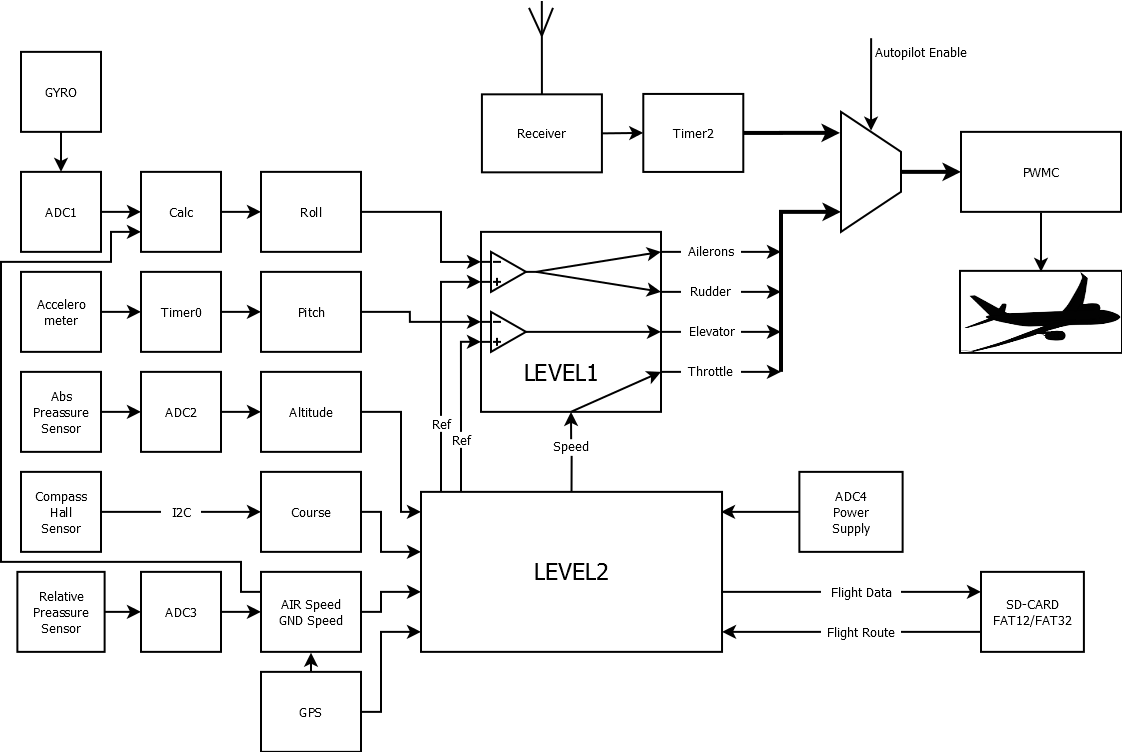
図 1
モジュールの入力はFSSi構造体であり、これにはパラメーターRoll、Pitch、Air Speedが含まれます。 Ref roll = 0およびpitch = 0の信号がない場合、正しい位置が考慮されます。また、このモジュールは飛行機のエンジンコントローラーを制御し、LEVEL2ユニットから受信した速度が飛行タスクに従って維持されるようにします。 Level2モジュールは、LEVEL1モジュールに外乱を導入するため、ゼロロールとピッチの値ではなく、飛行ミッションに従って計算されたレベルを強制的に保持します。 速度パラメータは、飛行タスクから直接送信されます。 モジュールの出力は、エルロン、エレベータ、ラダー、およびラダー(スロットル)の現在の位置を含むデータ構造です。 プログラム内のこの構造はFSSoと呼ばれ、モジュールの名前はFltStSys(飛行安定化システム)です。 自動操縦モードがアクティブになっている場合、PWMC(パルス幅変調コントローラー)に適用できます。 そうでなければ、HF受信機から受信した測定値に応じたタイマーで満たされた構造がPWMCに供給されます。 この制御モードは、無線制御モデルの伝統的なものです。
Level2モジュールは、Level1モジュールの制御アクション(ゼロポイントのシフト)を1秒に1回生成するため、動作が遅くなります。 Level1に転送されたデータには、プログラムでkeepという単語がマークされます。 すなわち これは、Level1モジュールが保持する必要があるものです。 このモジュールは、他のすべての機能を実行します。
1)離陸モードの実装。
2)高度ホールド
3)保持
4)ルートの計算と、SDカードで指定されたルートに沿った航空機の誘導。
5)1秒間に1回、SDカードにフライトパラメータを記録します。 (ブラックボックス機能)
6)BluetoothモジュールのCOMポートの1つに接続すると、テレメトリ情報が発行されます。
LEVEL1オートパイロットを構築する主なアイデアは、天空の色温度の光センサーや、NAVSTARやGLONASSなどの外部信号を使用せずに航空機を通常の飛行位置に維持する、完全に慣性の航空機操縦システムを構築することです。 GPS信号が消えると、磁気コンパスを使用して飛行が実行されます。 これらの要件を満たすために、次のセンサーが使用されます。
- ロール。 ロール値は、滑走せずに旋回するという仮定の下で、航空機の旋回の角速度とその直線速度の値から計算されます。 GYRO角速度センサーからのアナログ信号は、ADCコントローラー(ADC1)にデジタル化されて組み込まれ、Calcモジュールがロールを計算します。
- ピッチ。 ピッチは、加速度センサーからのパルス持続時間を測定することにより、コントローラーによって取得されます。 原則として、航空機では通常速すぎて速度の変化(離陸モードを除く)は起こらないため、これは許可されています。
- 高度 高さの測定には絶対圧力センサーが使用されます。 データは電圧の形式で取得され、コントローラのADC2チャネルの1つによってデジタル化されます。
- コース ヘディング値を取得するには、GPSモジュールを使用するか、GPSモジュールが使用できない場合、またはゼロ速度(開始前のヘディング制御)の場合、ホールセンサー付きのハネウェルデジタルコンパスを使用します。 I2Cインターフェースを介したコントローラーへの接続。
- スピード ピトー管の風速センサー。 相対圧力センサーが使用されます。 センサーからの電圧は、コントローラーのADC3チャネルの1つによって測定されます。 また、いくつかのことのために、GPSモジュールからの速度値が使用されます。
- GPS GPSモジュールはcomポート経由で接続されます。 ルートデータと地面に対する速度(GND速度)を取得するために使用されます。
- SDカード。 ただし、センサーではありませんが、モジュール設定(式の係数)およびルートデータのデータはそこから読み取られます。 フライトデータを1秒に1回記録します。
3.センサーとモジュール
3.1加速度計
センサーは直線加速度を測定するように設計されています。 加速度計として、ADXL202E(アナログデバイス)デバイスが使用されました。 これは、持続時間が加速度に比例するパルス形式の出力を備えた2軸加速度計です。 パルス幅はタイマーによって測定されます。 軸の1つ(X)のみが航空機の傾斜の測定に使用されます。 Y軸を使用して、ラダーの位置をトリミングすることにより、横加速度とその補正を計算できます。 現在は実装されていません。 このセンサーは、航空機の角速度と滑走の対応するセンサー(たとえば、Ya-18T、 EUP-53 )の「ボール」の位置を示します。 旋回中(パイロットの旋回では、航空機の進路の変化を意味します)、パイロットは通常、ペダルでペダルを踏み、滑りを減らすためにボールを中央の位置に保ちます。 勾配測定時の加速度計のドリフトを図に示します。 2.ご覧のとおり、冷蔵庫に15分間置いたときのドリフトは-5度でした。

図2
3.2ジャイロスコープ
航空機のパネルの重要な要素は、水平線インジケータです。 通常、機械式ジャイロスコープに基づいて構築されます。 計器飛行モードでの航空機のロールとピッチを示します。 このプロジェクトでは、MEV-50A半導体ジャイロスコープを使用して飛行機のロールを測定します。 ただし、従来のジャイロスコープとは異なり、半導体ジャイロスコープは絶対ロールではなく、その微分値である角速度を測定します。 これが、航空機の横揺れを測定するために半導体ジャイロスコープを使用できない主な理由です。 このような測定システムのドリフトは、小さな角速度では定義されません。 たとえば、VRヘルメット(仮想現実)で、ジャイロスコープがホールセンサーを備えた磁気コンパスではなく半導体デバイスに基づいている場合、非常にゆっくりと頭を回転させようとすると、頭の回転が「気付かない」ことがわかります。 そこで、ロールを計算する別の方法を適用しました。 ジャイロスコープは、垂直軸の周りの航空機の回転速度ωを測定するために設置されています。 航空機のロールは、式Θ= arctan(V ^ 2 / Rg)= arctan(Vω/ g)で計算できます。 図3を参照してください。
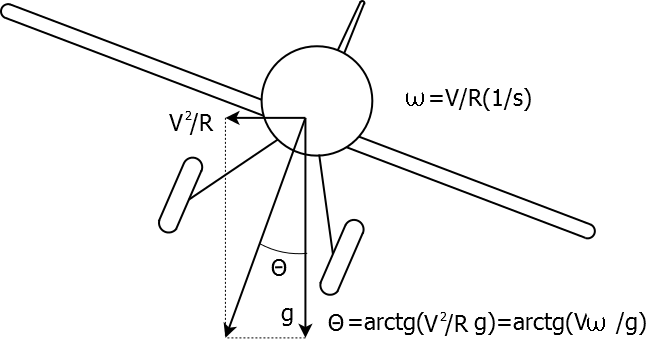
ここで、Rは航空機の旋回半径、gは重力加速度(9.8 m / s2)、Vは地面に対する速度(真対気速度)、ωは角速度、rad / sです。 真の速度はGPSによって提供されるか、風のコース、速度、および方向に基づいて計算する必要があります。 このプロジェクトはGPS速度を使用します。 0による乗算を除外するため、計算の最小速度は10 km / h未満に制限されています。 この方法で設置されたジャイロスコープには、測定精度に関する非常に深刻な要件があります。 そのため、テストされた最初のジャイロスコープが航空機の損失につながりました。 こちらでフライトのビデオを見ることができます。 「ブラックボックス」のデータも利用できます。 航空機はリモコンから約150mの高さまで上昇し、自動操縦がオンになります。 ただし、グラフからわかるように、ジャイロスコープは最初から不正確なデータ(写真ではGyr)を提供していました。また、飛行の97秒で自動操縦がオンになるとすぐに、航空機はテールスピンに陥りました。 残念ながら、人間工学的なエラーのため、安全に取り出すことはできませんでした。手動制御は、トグルスイッチが中央の位置にあるリモートコントロールからオンになりましたが、興奮から時間通りに見つかりませんでした。 シンプルな同軸ヘリコプターのジャイロスコープでした。 一般に、冷蔵庫の温度テストでこのデバイスの大きなドリフトが示されたため、最初からそうであることが明確でした。 15分での逸脱は約15g / sでしたが、このパラメーターの通常の動作値は通常、銀行の全範囲(30グラムまで)で1秒あたり数度を超えません。 そして、精度は0.1o / sより悪くないはずです。
ここでテストデータと測定プロセスを見ることができます。 ジャイロスコープの特性の比較を図5に示します。一般に、15分間ドリフトした場合、ノーネームジャイロスコープからの通常の飛行は期待できないことがわかります。 冷凍庫で約24°/秒でした。 現在、ジャイロスコープはMEV-50Aです。 25分でのドリフトは約0.6°/ sであることがわかります。

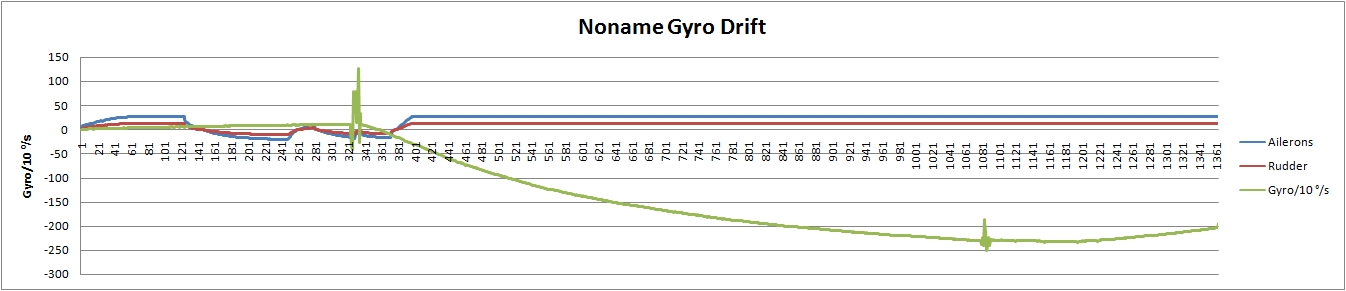
図5
3.3高度計
高度計としては、通常、絶対圧力センサーが使用されます。 このプロジェクトでは、 MPXA4115A6Uセンサーが使用されます。 センサーは、コントローラーによって測定される電圧を提供します。 飛行する前に暖める必要があります。 ウォームアップ時間は10〜15分に達します。 大気圧が変化すると、高度計は各フライトの前に自動的に較正されます。 センサーには大きな温度ドリフトがあります。 図6は、高度計のドリフトグラフを示しています。 速度センサーも圧力計であるため、ドリフトは同じです。

図 6
圧力センサーの最も興味深いテストは、間違いなく地下鉄の旅です。 トリップブラックボックスのデータを図7に示します。このグラフについては、12階(約36 m)でオートパイロットがオンになっていると言えます。次に、エレベーターで降下し、バスに乗り、次に地下鉄に乗ります。 地下鉄を降りたとき、私の旅の終点は本当に丘の上にあります。

図7
3.4対気速度センサー。
対気速度は通常、ピトー管を使用して測定されます。 原則として、これらのことは通常計算されます。 しかし、外側からチューブに息を吹き込むと(唇に触れずに)チューブ内の圧力が増加することは明らかです。 チューブ内の圧力を測定することにより、飛行速度を推定できます。 チューブは通常、翼または胴体のいずれかに配置されます(プルスクリューがない場合)。 適切に測定するには、エンジンが空気を直接チューブに吹き込まないことが必要です。 このビジネスの先駆者として、 MPXV5004GP相対圧力センサーを使用しました 。 絶対圧力センサーと同様に、このセンサーの出力は電圧であり、コントローラーが測定します。 起動時にも調整されます。 ただし、絶対圧力センサーとは異なり、高さをリセットできない場合は、抵抗器による粗調整は必要ありません。 チューブは、直径3 mmの炭素繊維から取られました。 図を参照してください。 8。

図8
センサーを較正するために、ハンドセットが車のバックミラーに取り付けられ、チェックインが行われ、現在の速度がレコーダーに記録されました。 オーディオとログを組み合わせると、対気速度センサーを調整できます。 それで私は、速度が圧力の平方根に比例することを自分で「発見」しました。 V = k *√p将来、速度測定の正確性はGPSを使用したテスト飛行中に確認されました。 対気速度センサーの温度ドリフトを図に見ることができます。 6.科学的発見が行われたばかりです。 加速中、空気が車室から排出され、圧力が低下しますが、これは高さの増加に相当しますか? そうですか? 身長との相関関係は偶然ではありません...
3.5デジタルコンパス
デジタルコンパスを使用すると、信号またはGPS受信機がない場合に飛行方向を判断できます。 当初、システムは慣性として構築されました。 飛行プログラムはGPS座標の形式では記録されませんでしたが、次の地点までの方向、速度、飛行時間が設定されました。 2軸コンパスHMC6352がコンパスとして使用されました。 開発者が賢い場合、彼は確かに3軸コンパスを使用します。 しかし、これまでに行われました。 コンパスにはI2Cインターフェイスがあります。 このデバイスは、コースまたは磁場の成分のレベルを直接与えることができます。 精度を上げるために、または外部の磁気環境を変更する場合は、キャリブレーションが必要になることがあります。 キャリブレーションを行うには、オートパイロットの電源を入れたときにキャリブレーションボタンを押し続ける必要があります。このフィールドでは、コントローラーが1分間キャリブレーションモードに入ります。 キャリブレーションモードは、動作モードインジケータの特別な点滅(J9、青色LED、1秒間に4回)によって示されます。 この時点で、航空機の厳密な水平位置で航空機を完全に数回転させる必要があります。 センサーを使用できるようにするために、オートパイロットハウジングに磁性材料を使用することはできません。 残念ながら、非常に最初の実験では、デバイスの厳密な水平位置の場合にのみ測定精度が良好であることが示されました。 飛行機では、この要件を満たすことはできません。 さらに、精度は低下するだけでなく、まったく存在しません。 わずかな角度でさえ傾けると、出力で数度、すべて+ -180°になります。 したがって、コンパスから直接コースを取得することを拒否する必要がありましたが、磁場成分の値を取得し、可能な限り補正を使用してコースを計算しました。 3番目のZ軸がない場合、このコンポーネントの値を定数としてとる必要がありました。 補正ありとなしのコンパスの結果を図9に示します。 HDGn-非補償コンパス、HDGc-補償済み。 グラフからわかるように、補正によりコース測定の品質が大幅に向上しますが、もちろん、精度は10分の1度ではありません。 また、コンパスは、GPS 09/12/2012なしのフライトデータで見ることができます。 ここでは、フライトはヴォホノボで行われました 。 2009年のフライトでは注意が必要です。 コンパスの補償はまだありませんでした。 図からわかるように、開始は実際には120度に近いコースで行われ、約300度のコースで終了します。 後の飛行で示されるように、機体への翼の取り付け不良とエンジンを切った後の飛行速度の低下により、航空機の強い揺れが発生しました(はい、はい!:))。

図 9。
3.6 GPSモジュール
アンテナが内蔵されたGPSモジュールが使用されます。 これは、シールド付き自動操縦ボックスの外側にある小さなショールです。 (図8を参照)。 モジュールのドキュメントは、GPSフォルダーにあります。 S3126モジュールが適用されます。 GPSモジュールは、UARTの1つを介してコントローラーに接続されます。 モジュールとの通信は、標準のNMEA0183プロトコルです。 テスト2017_09_02では 、航空機を起動する前にGPSが正しく機能せず、飛行機は非常にうまく間違った場所に飛んでしまいました。 「ブラックボックス」のデータからわかるように、TRACK005.LOG GPSは、彼が特定の地点から1キロ離れていることを「考え」ました。 これは2017_09_02のフライトデータで確認できます。 このテストでは、リモートコントロールがオンになっている間(つまり、オートパイロットがオフになっている間)、次のフライトポイントまでの距離を制御できなかったことに注意してください。 したがって、ログファイル内の134 Mの距離は、航空機の場所が正しく決定されたことを意味しませんでした。 次のポイントまでの距離は約100 m、オフセットは約0、コースは323であると想定されていました。ただし、ご覧のとおり、実際のデータは離陸時に14:10:33にのみ表示されました。 そして、コースは150、距離1012M、オフセット121M(割り当てに従って飛行機が飛行する軸からの偏差)であることが判明しました。 このテストの後、プログラムに変更が加えられ、モードに関係なく、ルートデータがテレメトリーで表示されるようになりました。 GPSが正しく機能しているかどうかを開始する前に確認できるようになりました。 この制御は、起動マップにも反映されます 。 オートパイロットは、GPSモジュールから次のパラメーターを受け取ります:時間、日付(ログファイルの記録時に使用)、可用性、可視衛星の数、座標経度、緯度、ノット単位の速度。 GPSの準備状態は、カードに情報を記録する瞬間に緑色のLEDが点滅することで示され、1秒に1回程度です。 GPSモジュールは座標と同じくらい正確に高さを決定できないため、高さは使用されないことを理解することが重要です。 オートパイロットをオンにすると、センサーのウォームアップとキャリブレーションの直後に、コントローラーは飛行タスクの座標に従ってルートを計算します。 このルートはマップに記録されませんが、BTテレメトリを介して表示されます。 これらのデータに基づいて、飛行データの正確性を評価できます。 このプログラムは、GPSの初期化を待機しませんが、これは簡単に変更できます。 これは、テレメトリログがどのように見えるかです。
GPILOT V2.17.0 24/2017年7月
GPSを待機しています...
GPS対応...
MMCカードからの初期化。非表示セクター= 57
G0,60.674983,29.173461,0,0,0,0,0,1
G1,60.675504,29.172667,30M、50kM / h、323D、5s、2,72M
G 2.60.676388.29.1971305.30M、50kM / h、322D、8s、3.123M
G 3.60.675641,29.168697,30M、50kM / h、239D、11s、4,164M
G 4.60.672877.29.1972249.30M、50kM / h、147D、26s、5.362M
G5,60.673546,29.174448,30M、50kM / h、58D、10s、6,140M
G6,60.674767,29.173783,20M、30kM / h、345D、16s、7,140M
G7,60.675737,29.172313,20M、0kM / h、323D、0s、0,134M
コンパスキャリブレーションスキップ...
センサーのキャリブレーション...
センサーのキャリブレーション完了...
3.7 Bluetoothモジュール
便宜上、離陸前のパラメーターの制御と一般的なデバッグのために、UART経由の出力にはparani-ESD1000 bluetoothモジュールが装備されていました。 他のデバイスとリンクするには、ボタンがインストールされています。 Androidデバイスで最も便利なアプリケーションは、 Bluetoothグラフィックアプリケーションでした。 Google Playで利用できます。
3.8 SDカード
自尊心のある航空機と同様に、私のプロジェクトにはブラックボックスが搭載されており、その役割はSDカードによって果たされます。 カードは遅いSPIインターフェースを介して接続されています。その接続のために、Rolf Freitagから既成のコードを受け取りました。彼に感謝しています。 このコードは、512バイト(セクター)の読み取りおよび書き込みブロックを提供します。 自動操縦設定、飛行ルートは地図に記録されます。 カードを1秒間に1回作業すると、プログラマが記録したいデータが書き込まれます。 オートパイロットの仕事を始めたとき、16 MBのSDカードを自由に使えるようにしていたので、 FAT12が最初に書かれ、この夏だけにFAT32が書かれました。 これを使用するには、プロジェクト内のファイルfat.cとfat.hをfat32.cとfat32.hに置き換える必要があります。 SDカードが使い果たされるにつれて、実践が示しているように、隠れたセクターの数が増加する可能性があります。 これは、SDカードの劣化と、特にFAT12システムでは、初期セクターが他のセクターよりも頻繁に上書きされるためです。 FAT32システムでは、テーブルは断片化されたファイルとしてマップ上の任意の場所に配置されるため、摩耗が遅くなります。 フライトデータは、TRACKXXX.LOGという形式のログファイルに自動的に書き込まれます。 記録用のデータは、バッファリングせずに1秒間にカードにすぐに書き込まれ、ファイルテーブルがすぐに更新されるため、フライトの最後の1秒までのフライトデータを取得できます。 GPSのおかげで、各ログファイルには現在の作成日時が記録されています。 サンクトペテルブルクのタイムゾーンの時刻を正しく表示するために、GPSモジュールに+3時間の修正が導入されました。