
SlideMove:滑りやすい瞬間
これまで、ゲーム内でキャラクターの動きを考慮したすべてのトリックは、DOOMエンジンの動きの離散的な性質に依存してきました。 ここで、ゲームコードをより深く掘り下げ、P_SlideMoveという無実の名前の関数に到達します。 この関数には、不注意なコードリーダーに「完全な混乱」があることを警告するコメントが含まれています。 ジョン・カーマックやベルント・クライメイアーがこのコメントを追加しましたが、非常に正確です。
ウォールランニング
大規模なSPT(「状態のテレポーテーションの試み」。これは、パート1で説明したキャラクターの動きの誘導インパルスとして知覚できます)が、例えば、ラインスキップ(境界を越える)などのバグにどのようにつながるかを既に検討しました。 幸いなことに、ゲームエンジンはそれほど愚かではなく、そのようなエラーを考慮に入れようとします! したがって、バグが発生した場合、キャラクターの動きが速すぎる場合、1つの動きをいくつかの適切なサイズに単純に分割するのが最適な解決策でしょうか? そして、これがまさにゲームエンジンの動作です。XまたはYモーションベクトルが15ユニット(プレーヤーの「半径」よりも1ユニット少ない)を超える場合、エンジンはプレーヤーの動きを2つの部分に分割して、それぞれを個別に計算します。 したがって、速度が速すぎる場合、プログラムはキャラクターが「中間」状態で障害物を横切るかどうかをチェックし、必要に応じてそれを逃しません。 プログラムは1つではなく2つの動きを実行するため、このプロセスを「ダブルSPT」と呼びます。
「待って!」読者はinするだろう。 -「最近、SPT> 15で国境を越えることについて話しましたが、これを許可しないコードを記述しています! これはどのように機能しますか?」 それでは、コードを見てみましょう。
f (xtap > 15 OR ytap > 15)
気づいた? さて、キャラクターが南または西に移動するとどうなりますか? X-SPTは、Y-SPTと同様に、突然...ネガティブになりました! そして、未知の理由により、ゲームエンジンはこの奇妙な事実を検証しません。
しかし、主な考えに戻ります。 そのため、エンジンはSPTを使用して、次のステップでキャラクターを「テレポート」する場所を決定します。 「着陸ゾーン」がビジーの場合、ゲームコードはP_SlideMove関数を呼び出します。この関数のタスクは、障害物との衝突の事実を確認し、もしあれば、衝突が自然に見えるようにキャラクターが動くことを確認することです。 まず、エンジンはプレイヤーの動きの方向を判断し、キャラクターのボックスの3つの角から来る3つのベクトルを計算します。 次に、障害物との衝突について各ベクトルをチェックします。 衝突が検出されると、プログラムは障害物への道の割合を決定し、キャラクターを見つかったポイントに移動します。 そして、彼はSPTの残りを取り、プレーヤーが打った壁に平行にそれを向けます。動きのこの部分は壁に沿った「スライド」です。
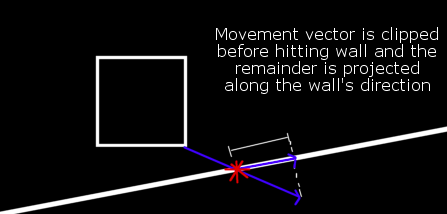
そして、それは多かれ少なかれ機能します。 ここには小さな内部問題が隠れています。「スライド」を計算するために、サブルーチンはキャラクターの初期SPTを使用します。プレーヤーの高速性のために2つの別々の動きに分割された場合でも。
これがわかったので、プロセス全体をステップごとに確認しましょう。
- プレーヤーは長い水平壁に向かって走ります
- たとえば、そのプレイヤーのSPTはX-SPT = 20およびY-SPT = 2です
- エンジンは、X-SPTが大きすぎると判断し、動きを2つに分割します。各インパルスは、X-SPT = 10およびY-SPT = 1です。
- ここで、エンジンは2つの動きのうち最初の動きをチェックし、プレーヤーの北の壁との衝突を判断します
- P_SlideMoveは救助に来て、キャラクターの「コーナー」から北と東に向けられた3つのベクトルを描画します。 ただし、ベクトルの計算には、基本的なSPT、つまりX-SPT = 20およびY-SPT = 2が必要です(X-SPT = 10およびY-SPT = 1ではありません)。
- ベクトルは北の壁を横切る
- エンジンは、たとえば現在のSPTの5%だけキャラクターを移動します
- そして最後に、エンジンは壁に沿ってベースSPTの残りの95%をリダイレクトし、プレイヤーを19ユニットに移動します。
- その後、作業が完了すると、エンジンはプレイヤーの動きの後半に進み、通常の手順を実行して、キャラクターをさらに19ユニット東に送ります。
上記を要約すると:プレーヤーが十分に高速で北または東に移動する場合(X-SPTまたはY-SPTは15ユニットを超える)、移動の最初の試みが障害物によってブロックされている間に、エンジンは1ティックで2回の完全な移動を実行します 注意してください-結果として、SPTまたは他の何かは変更されず、1つの時間の間に2つの動きが発生します。
ランニング
最後にトリック
「壁走り」(「壁に向かって走る」)をマスターしたので、壁を通過できないオブジェクト、またはむしろそのようなオブジェクトの長いシリーズに置き換えたらどうなるでしょうか?
エンジンはプレイヤーを新しい位置にテレポートし、着陸ゾーンで障害物を見つけようとします。 次に、プログラムは既知のP_SlideMoveを呼び出し、コーナーから3つのベクトルを描画して、衝突がないことを検出します。 そして、エンジンは今何をしますか?
奇妙なことに、この関数は実際にキャラクターとオブジェクトの衝突をチェックせず、オブジェクトの境界と「描画された」ベクトルの交差点のみをチェックします。 そして、P_SlideMoveが動きを妨げる線を見つけることができなかった場合、彼女は最後の秘密の武器「階段」(はしごで走る)を使用します。 プログラムは、プレーヤーをY軸に沿って正確に移動しようとします。移動できない場合は、X軸に沿って移動します。DOOMのすべてのオブジェクトは、座標軸に平行な側面を持つ「ボックス」で囲まれます。 したがって、プレーヤーが障害物に沿って移動し、階段プログラムが障害物を水平に移動することを決定した場合、プレーヤーはオブジェクトの片側に沿ってスライドします。
上記のことを頭に入れたので、物事の実行はウォールランニングとまったく同じであることが簡単に理解できます。プレイヤーは「スピード」で北または東に移動し、動きのチェックは各動きを2つの等しい部分に分割し、それぞれの半分が完全な初期ベクトルを受け取ります寛大なフィードP_SlideMoveを使用したSPT(着陸の開始点がブロックされるまで)。 キャラクターは、ティックごとに1回ではなく2回の完全な動きを成功させ、オブジェクトの「エッジ」に沿って倍速で滑るだけです。 このトリックはMap23で使用することで最もよく知られています。Map23では、プレイヤーが一連の樽に沿って物事を実行することで加速し、その結果、マップの一部を一見不可能な方法でジャンプできます。
ウォーラン「エアコントロール」
10:17スタント
このトリックを初めて見たとき、私は非常に驚いたので、DOOMエンジンの魔法についての記事を書くことにしました。これは、今あなたの目の前にある同じガイドです。
DOOMでプレーヤーを移動するための最も単純で最も理解しやすいルールの1つは、「空気制御は存在しません!」です。つまり、キャラクターの足が地面に触れない場合、キャラクターの動きは物理法則のみに依存し、プレーヤーには依存しません。 そして、Map14スピードランを見たとき、私が驚いたのは、プレイヤーが空中で高く走り回って壁に沿って出口まで直接走り、最後に彼が地面をひっくり返し、南のドアに向かって走ったのを見たときでした。
最初は、そのようなトリックがどのように可能であるかを理解できませんでした-プレイヤーのSPTは正確に東に送られました! 彼はY-SPTがゼロでしたが、どうして南に移動し始めることができましたか! しかし、いつものように、一見理解できるコードには驚きとトリックが含まれています。
プレーヤーが障害物の近くにいる場合、エンジンはプレーヤーを障害物に近づけようとしません。 彼は最後の手段を適用するだけです-私たちにとって既に馴染みのある階段です。 ここでは、マジックナンバー3.125%について説明します。 「プレーヤーコーナー」からプログラムによって描画されたベクトルの1つが、その長さの3.125%未満で壁を横切る場合、プログラムはプレーヤーを初期方向に動かそうとさえしません。 不要なステップをすべてスキップすると、エンジンは「階段」を適用します。 しかし、覚えているように、ラダーコードは、プレイヤーの初期SPTを変更することなく、キャラクターを厳密に水平(または垂直)に移動できます。
プロセスのロジックを検証したので、信じられないほどの「飛行の転換」を説明できます。 プレーヤーは、高いX-SPTと小さな南Y-SPTを持ちながら、壁に「上」を押すことで「離陸」します。 プレイヤーが地面の上にいる間、各ティックはエンジンがキャラクターを東と少し南に動かそうとしますが、動きの終点に壁を見つけます。 エンジンは即座に降伏し、「階段」に助けを求めて、SPTベクトルを変更せずにキャラクターを東に送ります。 結果として、Y-SPTは「空中走行」全体を通じてわずかにマイナスのままです。 そして最後に、出口への通路に到達すると、動きのチェックが成功し、プレイヤーは空中の動きの方向を変更します。これは、DOOM物理学の現実では不可能と思われます。
運動量保存
このトリックは、上記のものほど明白で壮観ではなく、適切な名前を見つけることは私にとって困難でした。 「ドアトリック」という名前を聞いたことがありますが、ドアを開けることを期待してスピードランナーがよく使用します。
トリックは些細なことです-プレイヤーは正しい方法で通過できない壁に当接し、動きの累積インパルス(SPT)を最大値に保ち、動かないままにすることができます(結果は、全速力でプレイヤーの手で武器の急激な振動を観察することで視覚的に見やすくなります。したがって、このトリックは「ぐらつきグライド "-スライドスイング)。 speedranの場合、これはプレイヤーがドアを開くことを期待して最高速度を維持し、通路が十分に大きくなると弾丸が押し寄せ、貴重なミリ秒を節約することを意味します。
しかし、このトリックはどのように機能しますか? 通常、キャラクターが壁にぶつかると、その速度(彼のSPT)はエンジンによって即座に低下します。 これは、プレイヤーの手にある武器のアニメーションを変更することで検出できます。 何が起きているのかを理解するには、DOOMエンジンのコードを詳しく調べて、衝突の定義方法を理解する必要があります。
通常、壁との衝突では、既知のP_SlideMoveサブルーチンが壁に向けられた動きベクトルの割合を計算し(衝突がベクトルの3.125%未満の距離で見つかった場合、この部分をスキップします)、壁に平行な動きの「残り」をリダイレクトします。 通常の状況では、この完全に合理的なアルゴリズムは速度を消滅させます-直角に壁にぶつかると、スライド速度は移動方向と壁方向の角度差の余弦に比例し、cos 90はゼロになります。
しかし、もっと深く見てみましょう。 エンジンは、壁との将来の衝突をどの程度正確に判断しますか? この問題を解決するために、プログラムは簡単な数学の方程式を解きます。貫通できない壁を表す線を取り、キャラクターのボックスの角の1つから方向付けられた動きベクトルを取り、交点を見つけます。 これらの計算は、ベクトル、行列、その他の数学ツールを使用して実行できます。 しかし、DOOMエンジンは最も単純な方法を使用します:セグメントAの端点を取得し、セグメントBに対してどちら側にあるかを確認します。次に、Aのどちら側がセグメントBの端点にあるかを確認します。交差します。
このような単純なテストを実行するには、少し除算と乗算が必要です。 そして、ここでゲームエンジンは別の側面を明らかにします。 エンジンは、すべてのデータを32ビット値の形式で、そして最も重要なこととして、固定小数点数の形式で保存します。 この場合、1ビットは数値の符号(正/負)を示すために使用され、15ビットは整数部と残りの16-小数部を格納します。 15ビットはかなりのビットです。 実際、値の有効範囲は-32768〜32768です。したがって、2つの数値を乗算する必要がある場合は、結果が範囲外にならないように十分に注意する必要があります。 32768の平方根は181だけです。これは、200単位の2行の交差を確認すると、メモリセルがオーバーフローすることを意味します。 そして、そのようなタスクに対処する方法は?
以下に、問題を処理する「交差点チェッカー」関数のコードを示します。
left = (line->dy / 256) * (dx / 256); right = (dy / 256) * (line->dx / 256);
ご覧のように、計算を開始する前にすべての値を256で除算するだけです(完全に正確にするために、8のビット単位の右シフトを実行しますが、これは何も変更しません)。 このような単純な方法で、エンジンは、計算の結果がオーバーフローを回避するのに十分小さいことを保証します。 同時に、小数部分を16ビットから8ビットに減らしたので、問題ありませんか?
まあ、ほとんどの場合、問題はありません。 しかし、いずれかの方向のSPTが非常に小さい場合はどうなりますか? たとえば、プレーヤーはX-SPTが20、Y-SPTが0.001のコーナーに走ります。 よく見てみましょう:
- エンジンは、キャラクターを東に20ユニット、北に0.001ユニット移動しようとしますが、北の壁を検出するため移動できません。
- エンジンはP_SlideMoveを呼び出して衝突を処理し、コーナーから3つのベクトルを描画します
- エンジンは最初のベクトルをチェックし、意図したとおりに北の壁との交差を検出します
- エンジンは2番目のベクトルをチェックしますが、256による除算のおかげで、小さな0.001 Y-SPTはすでにゼロに丸められており、プログラムはベクトルと北の壁との交差点を検出しません
- 次に、エンジンは、最初のベクトルの方向に、たとえばベクトルのサイズの50%だけ、プレーヤーを部分的に移動しようとします
- しかし、エンジンがプレイヤーを0.0005ユニット北に移動させようとすると、終点で壁を見つけることができません
- エンジンは無力な手を落とし、「階段」を引き起こします。これは、知っているように、最初のSPTを変更するものではありません。
要約すると、プレーヤーが非常に小さなY_SPTまたはX-SPTでコーナーを走る場合、ベクトルの誤ったゼロ化の結果として、高いSPTを維持できます。
無効なグライド
トリック:0:20
そして今、重砲兵を撤退する時です。 条件付き分離線に違反する代わりに、絶対に通過できない行を無視します。
一見、このトリックは単に不可能です。 壁を通過するには、キャラクターは即座に少なくとも32ユニット移動する必要があります。 次に、2つの部分に分割した後でも、各「半分」は16単位(文字サイズ)以上になります。 SR50で達成できる最大速度は1ティックあたり23.57ユニットであることが既にわかっていますが、制限に達しても、エンジンは23.57を2つの別々の動きに分割します。 さらに、ゲームコードでは、30ユニットという厳しい制限速度が縫われています。これは、動きの計算の最初に適用されます。 そして、そのような条件下で、キャラクターは1回の動きで最大32ユニットまで移動できますか?
全体として、23.57が従来のキャラクターコントロールで達成可能な最大速度であることは事実ですが、「通常の手段」がSPTを増加させる唯一の方法ではない場合はどうでしょうか。 この知識があれば、DOOMエンジンからさらに多くのものを絞り出すことができます。 (意図的にダメージブーストを説明するつもりはありません。制御とテストは困難です。もちろん、例えばロケットで自分自身を爆発させることで23.57以上の速度を得ることができますが、もっと簡単で安全な方法があります)。
P_SlideMoveに戻る時間です。 すでに説明したように、衝突では、ベクトルの方向に部分的に移動した後、SPTの残りの部分が障害物と平行にリダイレクトされます。 では、このロジックはどのように実装されていますか? 次の3つの手順が実行されます。
- 未使用のSPTの量を決定する
- 障害物に沿って向けられた同じ大きさのベクトルを作成する
- 新しいベクトルをxコンポーネントとyコンポーネントに分割して、プレーヤーの新しいX-SPTとY-SPTを決定します。
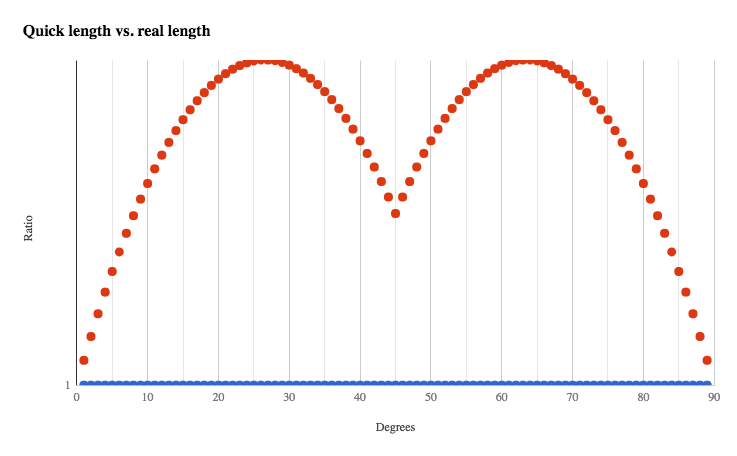
これらの計算はすべて、サインとコサインを使用して実行するのが非常に簡単です。 しかし、ここでコードは三角法の存在を忘れているように見え、単純に見事な単純化を使用しています。 STDバランスの量を正しく判断する代わりに、P_AproxDistanceという関数を呼び出します。 そして、このP_AproxDistance(近似距離)は何をしますか?
return (the longer of XTAP or YTAP) + (half the shorter of XTAP or YTAP)
はい、はい、あなたは間違っていませんでした。 サインやコサインは必要ありません。ルートは正方形と立方体です。十分な追加があります。 1つの軸を2番目の軸の半分に追加するだけです。 あなたは、そのような「近似」(近似)がどれくらいおよそあるか想像できます。
したがって、この機能はプレーヤーに非常に深刻なボーナスを与えます。 実際、そのような計算の結果は、正しい結果よりも安定して大きいということです。 例で確認しましょう:X-SPT = 3およびY-SPT = 4のプレーヤーの「スリップ」ベクトルを計算しましょう。ピタゴラスの定理は、スリップベクトルのサイズが5であることを示しています。これは、辺3および4の直角三角形の斜辺です。しかし、P_AproxDistance関数はサイズ5.5。 そして今、私たちは単に不正確な計算のために10%の加速を得ました! そのようなボーナスのサイズはプレイヤーの動きの角度に依存し、残念ながら、角度が45度の場合(ボイドグライドトリックの通常の状況)、ボーナスは悲惨な6%になります。 これで十分です。
ただし、驚くべき結果を得るにはもう少し努力が必要です。 通常、P_SlideMoveはこれを行います。
- 1から始まるカウンターを開始します
- 角からベクトルを描画し、プレイヤーをそのいずれかの方向に移動させようとします
- 衝突後にベクトルの残りがある場合、障害物に平行に向けられた新しいベクトルを計算し、プレーヤーを新しい方向に動かそうとします
- 動きの「スリップ」が不可能な場合、最初からやり直し、カウンターを1つ増やします
- さて、カウンターがすでに3に達している場合、どうしようもなく手を下げて、「階段」に助けを求めます。
プレイヤーがコーナーにいる場合、壁との最初の衝突により2番目の壁へのスライド(スライド)が発生します。 そこですぐに2回目の衝突が発生し、アルゴリズムが新たに開始され、既存のSPTが初期データとして受け入れられます。つまり、最後のサイクルからの「スリップ」の残りの部分です。 全体のトリックは、移動しようとするときにP_SlideMoveが常に失敗する状況を作成することです。 ここで何が起こります:
- 私たちに知られている3つのベクトルが描かれています
- 短い方は、自身の長さの3.125%未満の距離で壁と交差します。
- 現在のSPTの100%を使用して「スリップベクトル」を即座に計算します
- 「近似」P_AproxDistanceの不正確さにより、SPTの計算プロセスで増加します
- ただし、新しい方向にスライドすることはできないため、プロセスは再起動します
- 説明されている手順は2回繰り返されます
- アルゴリズムは階段も呼び出して降伏しますが、これも失敗しますが、同時にプレイヤーの2倍に増加したSPTを節約します。
しかし、それだけではありません。「コーナーを走る」ときにプレイヤーのSPTが15ユニットを超え、北または東に向けられている場合、動きが2つの部分に分割されるため、説明されているプロセスが2回発生します。 つまり、SPTの増加は1ティックで4回発生します!
これでプロセス全体を確認できました。 適切な位置を選択するだけで、コードがサイクルに入り、SPTが常に増加します。 SPTの各ティックは、大まかな近似のため、比較的小さい量で2回(または4回)増加します。 各ティックの終わりに、増加したSPTはもちろん「摩擦」によって減少しますが、ティックごとのSPTの増加は少なくとも10%ですが、これは摩擦による減少を超えて一定の増加を提供するのに十分です。 SPTが32ユニットを超えるまで待機します。
« 30 !» — . はい、そうです。 « » 30 , , 32 . -, 37 38 .
: , . X- Y-, . , void glide .
ELASTIC COLLISIONS
void glide , : «elastic collisions» ( ). , , .
elastic collisions . – 15 , -15, - . , - , , .
elastic collisions, DOOM. , , ? : - . . , : X- Y- 16 , 16.
«, ?» — . , , -: , . , , .
, , . : , . line intersection ( ): , . DOOM , .
, . , , . , «» , . – , . wall gliding — . , , , , .
elastic collisions, ! . , «», .
, . , , . , 0 ( ) 180 ( , ).
: , , - , ?
if (deltaangle > ANG180) deltaangle += ANG180;
: « » – , , . , , ?
, , ( , «» ) – ? «» , .
, , ? , , , . , : 16 , , , ( ) ( ). « » - . , , .
, , . , ?
BLACK FRIDAY : 30% - BLACK30% 1-6 !
! VPS (KVM) , , — ! VPS (KVM) c ( VPS (KVM) — E5-2650v4 (6 Cores) / 10GB DDR4 / 240GB SSD 4TB HDD / 1Gbps 10TB — $29 / , RAID1 RAID10) , , , , , «»!
インフラストラクチャを構築する方法 クラスRは、1米ドルで9,000ユーロのDell R730xd E5-2650 v4サーバーを使用していますか? Dell R730xdは2倍安いですか?オランダとアメリカで249ドルからIntel Dodeca-Core Xeon E5-2650v4 128GB DDR4 6x480GB SSD 1Gbps 100 TVを2台持っているだけです!